当s=24=-V5时, -V5 -1 0 0 01 -V5 1 0 10 rank[sI-A B]=rank =4 0 0 -5 -1 01 0 -5 -5 -2 0 系统满足PBH秩判据的能控条件, 所以系统完全能控
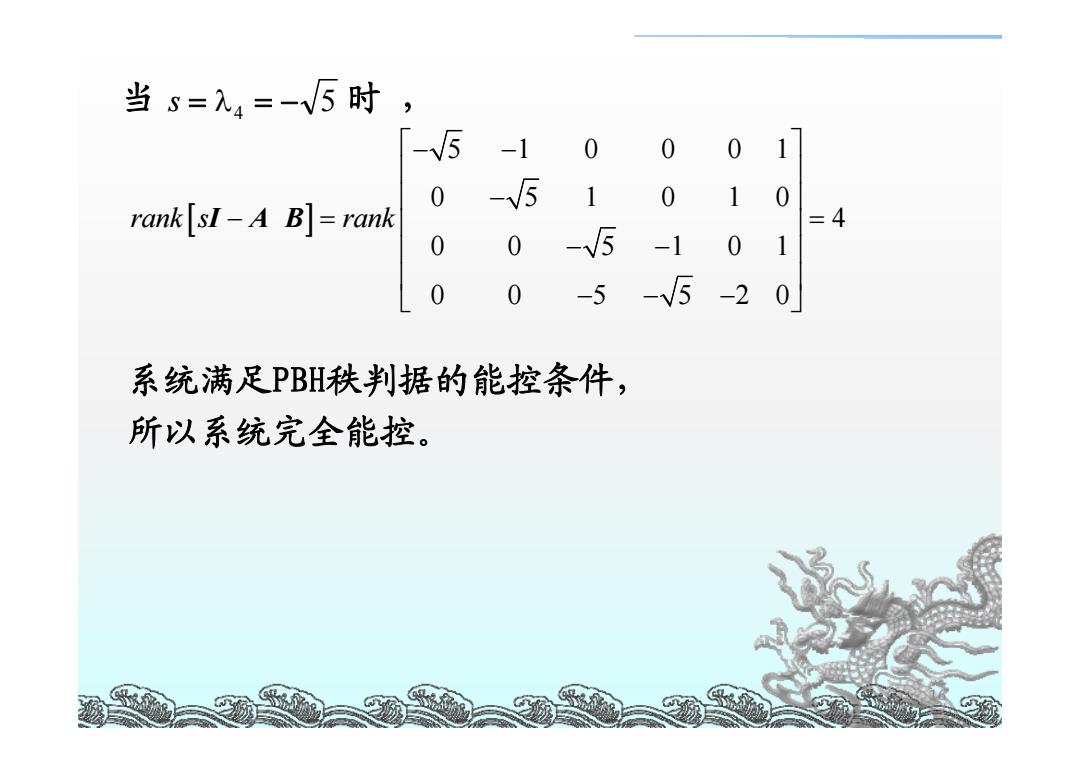
16 当 5 s = λ4 = − 时 , [ ] 5 1 0 0 01 0 5 1 0 10 4 0 0 5 1 01 0 0 5 5 20 rank s rank I AB ⎡ ⎤ − − ⎢ ⎥ ⎢ ⎥ − −= = ⎢ ⎥ ⎢ ⎥ − − ⎢ ⎥ ⎣ ⎦ −− − 系统满足PBH秩判据的能控条件, 所以系统完全能控
定理4-4[能控性PBH特征向量判据]线性连续定常系统 x=Ax+Bu 为完全能控的充分必要条件为,矩阵A的非零左特征 向量不与B的所有列相正交。也即对A的任一特征值 入,(i=1,2,…,n),使同时满足 a"A=Aa",a'B=0 (4—39) 的特征向量a=0。 证明:见教材P117 能控性PBH特征向量判据主要用于理论分析
17 定理4-4[能控性PBH特征向量判据] 线性连续定常系统 x Ax Bu & = + A B A λ (i i = 1,2,L, n ) α A α T T = λi α B 0 T = α ≡ 0 为完全能控的充分必要条件为,矩阵 的非零左特征 的所有列相正交。也即对 的任一特征值 ,使同时满足 , 。 向量不与 (4 —39) 的特征向量 证明:见教材P117 能控性PBH特征向量判据主要用于理论分析
定理4-5[能控性约当标准型判据]线性连续定常系统 x=Ax+Bu 为完全能控的充分必要条件为 (1) 当矩阵A的特征值入1,入2,…,入n为两两相异时, 系统通过线性非奇异变换得到的对角线标准型 = x+Bu (4-44) 式中,五不存在元素全为零的行
18 定理4-5[能控性约当标准型判据]线性连续定常系统 x Ax Bu & = + 为完全能控的充分必要条件为 A λ λ λ n , , , 1 2 L 1 2 x x Bu n λ λ λ ⎡ ⎤ ⎢ ⎥ = + ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ & O B (1) 当矩阵 的特征值 不存在元素全为零的行。 为两两相异时, 系统通过线性非奇异变换得到的对角线标准型 式中, (4 —44)
(2)当矩阵A的特征值是多重根的情况,通过非奇异 变换得到的约当标准型 元=A舵+Bu (4-45) 式中 B A- 8 B (4-46) nxn) (nxp) B 对于矩阵A的有相同特征值的约当块的B的最后一 行所组成的矩阵,其行线性无关, 证明:见教材P119 约当标准型判据是一种相当直观的能控性判别方法
19 (2) 当矩阵 的特征值是多重根的情况,通过非奇异 A 变换得到的约当标准型 ˆ ˆ x ˆ ˆ = + Ax Bu & 1 1 2 2 () ( ) ˆ ˆ ˆ ˆ , ˆ J B J B A B J B nn n p l l × × ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ O M (4 —45) 式中 (4 —46) 对于矩阵 的有相同特征值的约当块的 的最后一 行所组成的矩阵,其行线性无关。 Aˆ Bˆ 证明:见教材P119 约当标准型判据是一种相当直观的能控性判别方法

例4-5试判定下列系统的完全能控性 -7 2 (1) 文= 0 -5 0 x+ 4 u 0 0 -2 1 (2) 0 1 9 文 0 0 0 x+ 0 L 0 0 2
20 例4-5 试判定下列系统的完全能控性 70 0 2 0 50 4 00 2 1 x x u ⎡ ⎤ ⎡⎤ −⎢ ⎥ ⎢⎥ =− + ⎢ ⎥ ⎢⎥ ⎢ ⎥ ⎢⎥ ⎣ ⎦ ⎣⎦ − (1) & (2) 01 0 9 00 0 0 00 2 1 x x u ⎡ ⎤ ⎡⎤ ⎢ ⎥ ⎢⎥ = + ⎢ ⎥ ⎢⎥ ⎢ ⎥ ⎢⎥ ⎣ ⎦ ⎣⎦ − &