定义: 1.K定义为开环系统开环传递函数的增益,简称为系统开环 增益或开环放大倍数。也就是说,在G(S)中,除去积分环 节之外,令其s=0代入所得到的数值,称为开环增益。如 式(3.64)中,其开环增益就是K,即 K*I, K- I P (3.65) 2.式(3.65)中Y表示开环传函积分环节的个数。工程上以积 分环节个数来定义系统结构类型。即 ·Y=0,系统没有积分环节,称0型系统: ·y=1,系统有一个积分环节,称I型系统; y=2,系统有两个积分环节,称Ⅱ型系统
定义: 1.K定义为开环系统开环传递函数的增益,简称为系统开环 增益或开环放大倍数。也就是说,在Gk(s)中,除去积分环 节之外,令其s = 0代入所得到的数值,称为开环增益。如 式(3.64)中,其开环增益就是K,即 (3.65) 2. 式(3.65)中γ 表示开环传函积分环节的个数。工程上以积 分环节个数来定义系统结构类型。 即 • γ=0,系统没有积分环节,称0型系统; • γ=1,系统有一个积分环节,称Ⅰ型系统; • γ=2,系统有两个积分环节,称Ⅱ型系统。 − = = = n i i m j j p K z K 1 1 *
三.给定稳态误差的计算 控制系统对给定输入信号R()作用下所产生的稳态误 差,称给定稳态误差。它反映了系统对给定输入信号在稳 态时的跟踪能力(跟踪精度)。下面我们应用静态误差系数 法,讨论不同典型给定输入时的给定稳态误差计算。 <一>)为阶跃函数,即Rs)=,A为一常值。 根据式(3.61)得: 1 A A A es =lims. (3.66) 30 1+G(s)s 1+limG(s)1+K 5→0 武中,K,=mG,⑤)=m《,称静态位置误差系数。根据 式(3.66)有: 对于“0”型系统,Y=0,所以K=K,而稳态误 差 A ,是一个常数。可见ess减小必须增大开环 1+K 放大系数
三. 给定稳态误差的计算 控制系统对给定输入信号 作用下所产生的稳态误 差,称给定稳态误差。它反映了系统对给定输入信号在稳 态时的跟踪能力(跟踪精度)。下面我们应用静态误差系数 法,讨论不同典型给定输入时的给定稳态误差计算。 <一> 为阶跃函数,即 ,A为一常值。 根据式(3.61)得: (3.66) 式中, ,称静态位置误差系数。根据 式(3.66)有: 对于“0”型系统,γ=0 ,所以 Kp=K,而稳态误 差 ,是一个常数。可见ess减小必须增大开环 放大系数。 R t( ) R t( ) ( ) A R s s = 0 0 1 lim 1 ( ) 1 lim ( ) 1 ss s k k p s A A A e s → G s s G s K → = = = + + + S K K G s s k s p 0 0 lim ( ) lim → → = = 1 ss A e K = +
对于“I”型系统,,所以K=∞,稳态误差是零。同理,“Ⅱ” 型系统,稳态误差也是零。 “0”型系统稳态误差为常数,从物理意义上讲,如图3.29 所示的静态结构图可知,因系统没有积分环节,要维持系统 恒定输出,即 C(oo)=Kess 必然要存在一定恒定稳态误差,否则系统就没有输出。系统 的开环增益越大,稳态误差就越小。 c() 图3.29
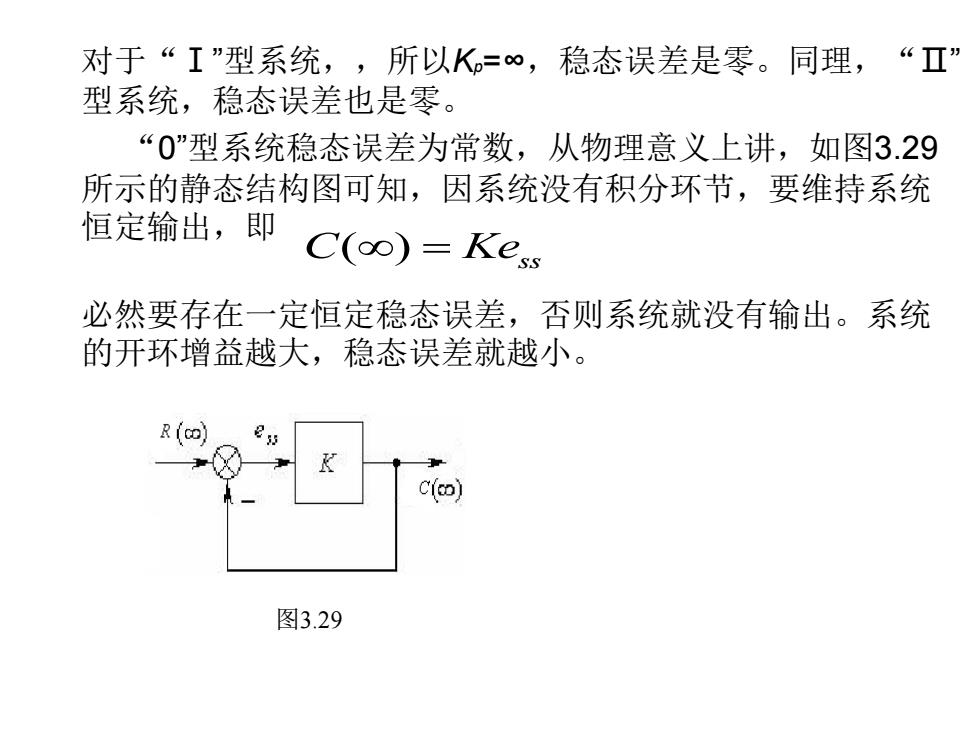
对于“Ⅰ”型系统,,所以Kp=∞,稳态误差是零。同理,“Ⅱ” 型系统,稳态误差也是零。 “0”型系统稳态误差为常数,从物理意义上讲,如图3.29 所示的静态结构图可知,因系统没有积分环节,要维持系统 恒定输出,即 必然要存在一定恒定稳态误差,否则系统就没有输出。系统 的开环增益越大,稳态误差就越小。 ( ) C Ke = ss 图3.29
“工”型系统对为阶跃输入信号时,系统没有稳态误差, 从物理意义上来看,由于有一个积分环节,系统处于稳态 时起作用的仅是比例环节K及积分环节,其稳态结构图如图 3.30所示。根据积分环节的功能当动态时有误差,积分器 就积分,输出不断增大,误差也逐渐减小,当积分器输出 值等于时,误差为零,积分器停止积分而维持原积分值等 于。因而此时稳态误差为零。 C (co 图3.30
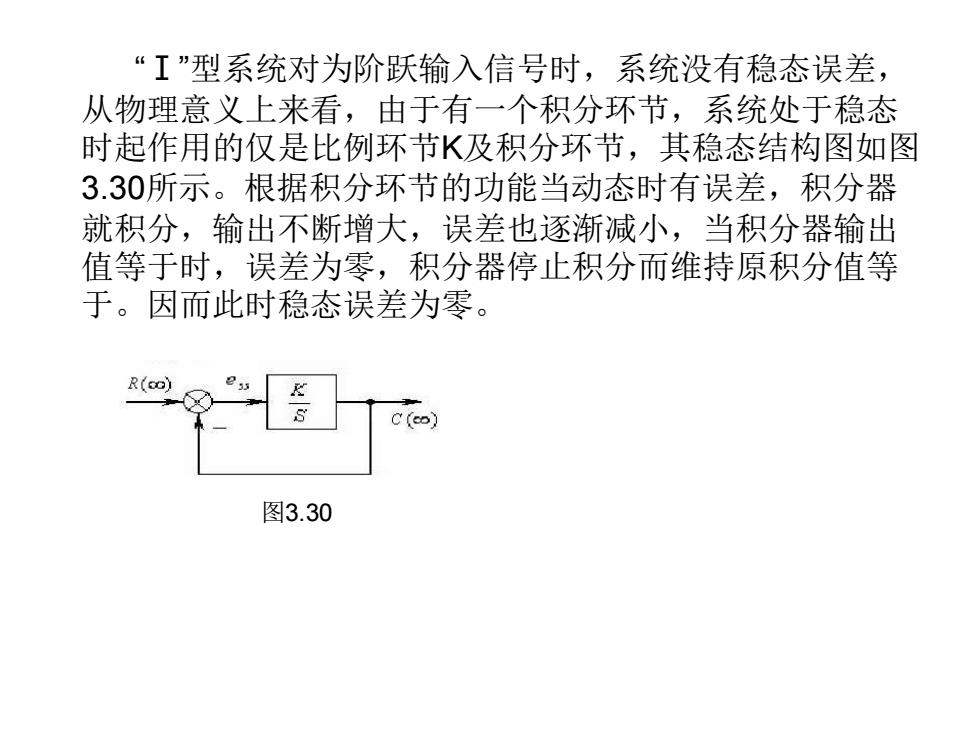
“Ⅰ”型系统对为阶跃输入信号时,系统没有稳态误差, 从物理意义上来看,由于有一个积分环节,系统处于稳态 时起作用的仅是比例环节K及积分环节,其稳态结构图如图 3.30所示。根据积分环节的功能当动态时有误差,积分器 就积分,输出不断增大,误差也逐渐减小,当积分器输出 值等于时,误差为零,积分器停止积分而维持原积分值等 于。因而此时稳态误差为零。 图3.30