从式(4-21)和式(4-22)可看出:1、桥臂由多个应变片串联并不能增加电桥的输出,它和单臂一片工作时电o桥的输出相同,但具有对各应变片产生的应变取平均值的效果。基于这一特性,在传感器设计中,常采用桥臂多片串联,以减小因贴片位置偏差等原因可能产生的误差,以提高测量的精度。图37不等背对称电机(a))电联电话(b)并联电桥2、桥臂由多片串联时,可以采用提高供桥电压的办法提高桥的输出。因多片串联时的分压原理,每片承受的电压降低。(二)电桥桥臂由多枚应变片并联组成如图3-7b所示。设R=R,=R/n,R,=R,=R(图中n=2)。当桥臂R,中的n个应变片都产生相等的AR变化时,其电阻变化量R+AR2_R-ARARI =(3-23)nnn将式(3-23)代入式(3-16)得TRU-1ARUUn"A(R+RFU(3-24)nn若R,臂各片都产生AR变化,但AR的绝对值不等,则AR1台UBD-1(3-25)R由式(3-24)和式(3-25)可见;桥臂由多个应变片并联亦不能增加桥的输出,但仍具有对各应变片产生的应变取平均值的效果。因并联应变片每片承受的电压不变,故不能采用提高供桥电压的办法提高电桥的输出(三)电源接入不等臂对称电桥的位置对电桥输出的影响
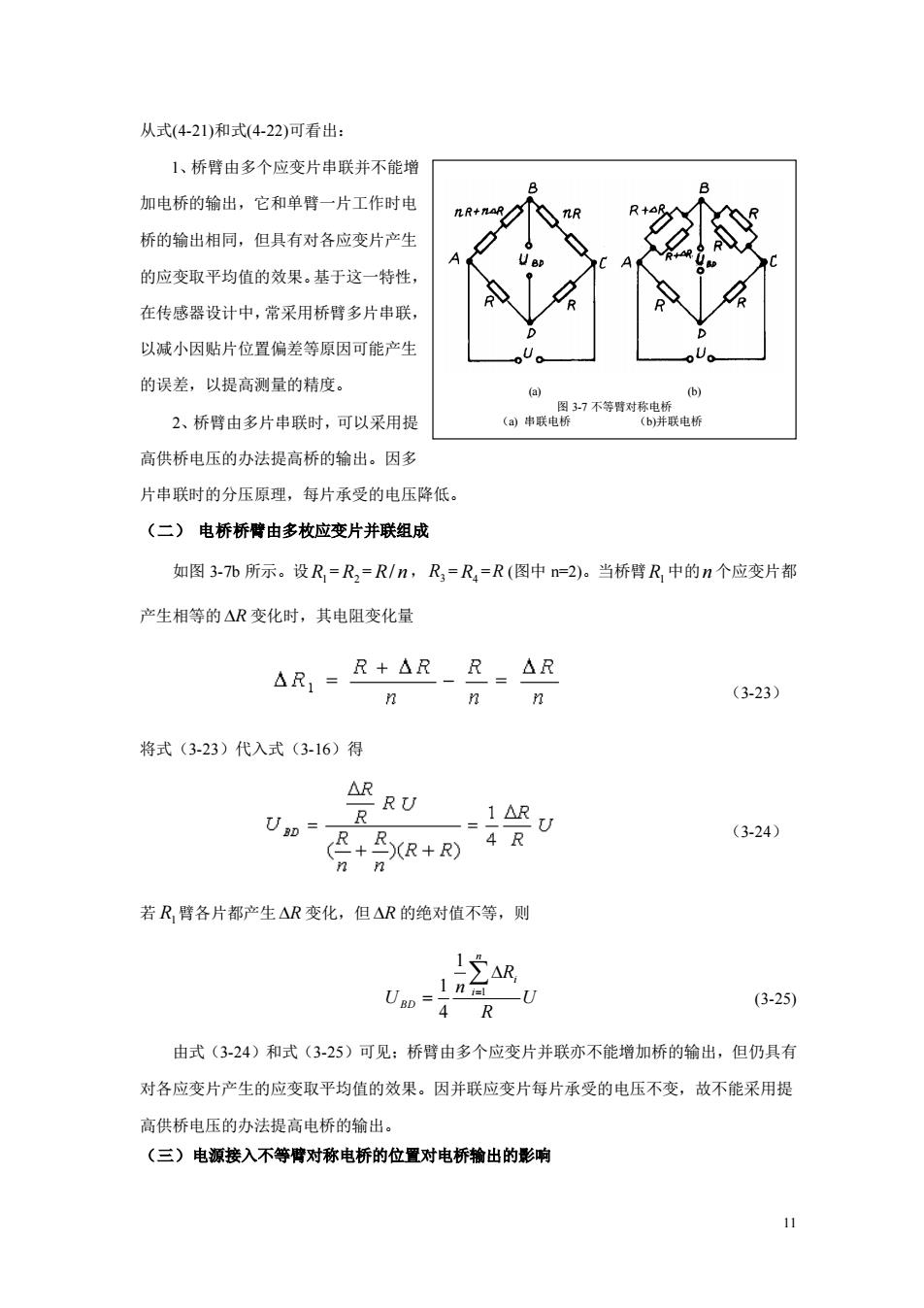
11 从式(4-21)和式(4-22)可看出: 1、桥臂由多个应变片串联并不能增 加电桥的输出,它和单臂一片工作时电 桥的输出相同,但具有对各应变片产生 的应变取平均值的效果。基于这一特性, 在传感器设计中,常采用桥臂多片串联, 以减小因贴片位置偏差等原因可能产生 的误差,以提高测量的精度。 2、桥臂由多片串联时,可以采用提 高供桥电压的办法提高桥的输出。因多 片串联时的分压原理,每片承受的电压降低。 (二) 电桥桥臂由多枚应变片并联组成 如图 3-7b 所示。设 R1 = R2 = R n/ ,R3 = R4 =R (图中 n=2)。当桥臂 R1 中的 n 个应变片都 产生相等的 R 变化时,其电阻变化量 将式(3-23)代入式(3-16)得 若 R1 臂各片都产生 R 变化,但 R 的绝对值不等,则 U R R n U n i i BD = = 1 1 4 1 (3-25) 由式(3-24)和式(3-25)可见;桥臂由多个应变片并联亦不能增加桥的输出,但仍具有 对各应变片产生的应变取平均值的效果。因并联应变片每片承受的电压不变,故不能采用提 高供桥电压的办法提高电桥的输出。 (三)电源接入不等臂对称电桥的位置对电桥输出的影响 (3-23) (3-24) (a) (b) 图 3-7 不等臂对称电桥 (a) 串联电桥 (b)并联电桥
如图3-8所示。电桥中阻值相同的两臂的联接点称为中点,可见图3-8a是中点接输出的,这种电桥称为卧式桥;图3-8b是中点接电源,称为立式桥。对于卧式桥,R,=R,=nR,R,=R=R,设桥臂R,各应变片都产生相等的AR的变化,图3-8电源位置的影响即R,+△R=n(R+△R),根据式(3-1)可得1△RUD=0R这与前述桥臂由数片串联的情形相同,电桥的输出电压与n无关。对于立式桥,R=R,=nR,R,=R,=R。设桥臀R各应变片都产生相等的AR的变化,即R,+△R=n(R+△R),代入式(3-1)可得Um=IR+ARR=U=笼U(3-26)(nR+R)(R+nR)R (n+1)由(3-26)可见,电桥输出电压与n有关。n=1时输出最大,n>1或n<1时输出都将减小。七多个电桥的串、并联如果把每个电桥看作一个传感器,那么电桥的串、并联可视为传感器的串、并联。(一)电桥的串联图3-9为三个电桥的串联,其总输出电压AU等于三个单电桥输出电压之和。设图 3-9 电桥的串联AU、AU,、AU,分别为三个电桥的输出电压,则串联后的总输出电压为AU-AU,+AU,+AU,(3-27)由式(3-27)可见,电桥串联可获得较高的输出电压。总输出等于三个电桥的输出之和。这种接法在饲料工业中得到广泛应用。生产配合饲料所用的电子料斗秤,普遍采用三个荷重12
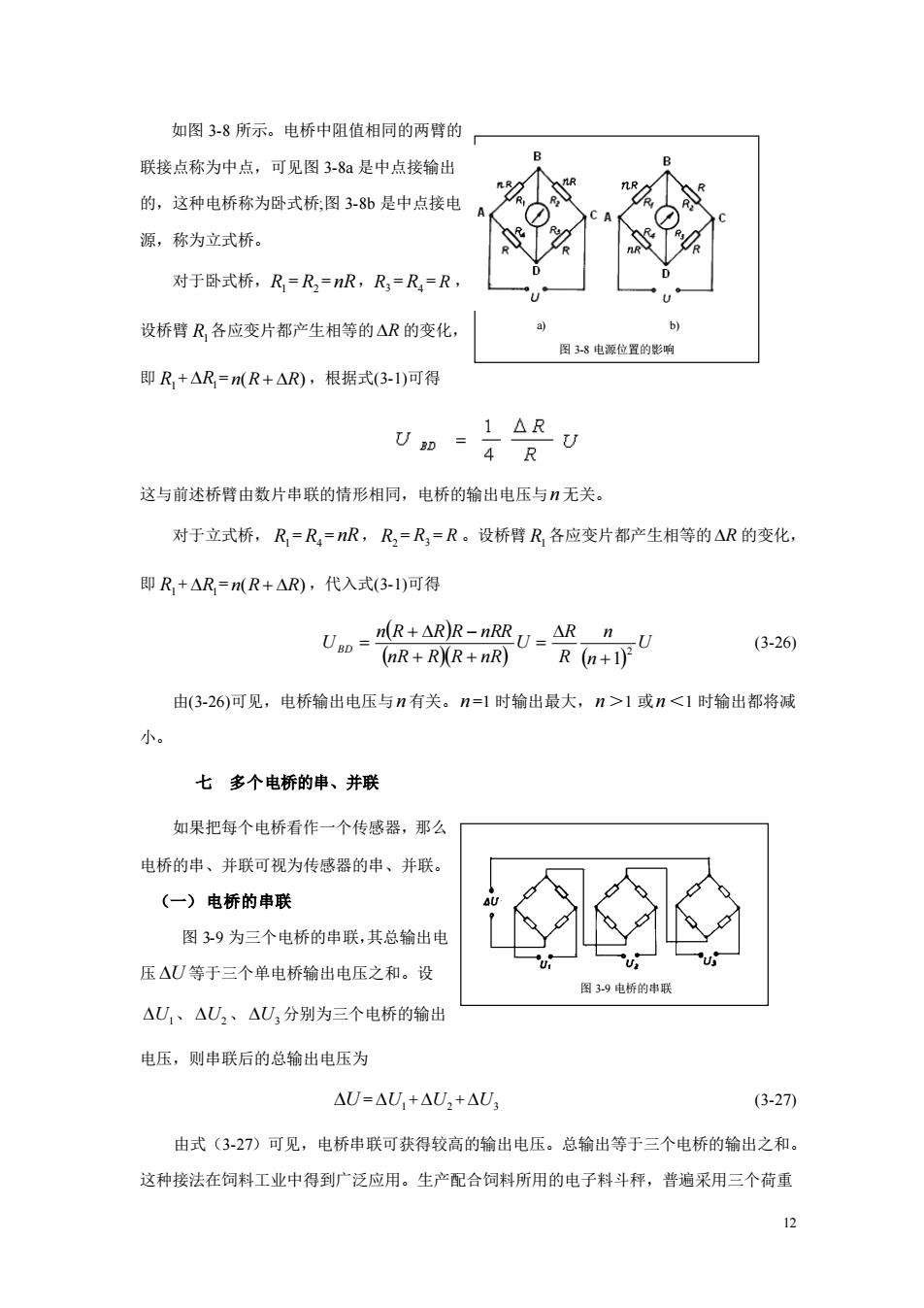
12 如图 3-8 所示。电桥中阻值相同的两臂的 联接点称为中点,可见图 3-8a 是中点接输出 的,这种电桥称为卧式桥;图 3-8b 是中点接电 源,称为立式桥。 对于卧式桥, R1 = R2 = nR,R3 = R4 = R , 设桥臂 R1 各应变片都产生相等的 R 的变化, 即 R1 + R1 = n R R ( ) + ,根据式(3-1)可得 这与前述桥臂由数片串联的情形相同,电桥的输出电压与 n 无关。 对于立式桥, R1 = R4 = nR, R2 = R3 = R 。设桥臂 R1 各应变片都产生相等的 R 的变化, 即 R1 + R1 = n R R ( ) + ,代入式(3-1)可得 ( ) ( )( ) ( ) U n n R R U nR R R nR n R R R nRR UBD 2 +1 = + + + − = (3-26) 由(3-26)可见,电桥输出电压与 n 有关。 n =1 时输出最大, n >1 或 n <1 时输出都将减 小。 七 多个电桥的串、并联 如果把每个电桥看作一个传感器,那么 电桥的串、并联可视为传感器的串、并联。 (一) 电桥的串联 图 3-9 为三个电桥的串联,其总输出电 压 U 等于三个单电桥输出电压之和。设 U1、 U2、 U3 分别为三个电桥的输出 电压,则串联后的总输出电压为 U = U1 + U2 + U3 (3-27) 由式(3-27)可见,电桥串联可获得较高的输出电压。总输出等于三个电桥的输出之和。 这种接法在饲料工业中得到广泛应用。生产配合饲料所用的电子料斗秤,普遍采用三个荷重 a) b) 图 3-8 电源位置的影响 图 3-9 电桥的串联
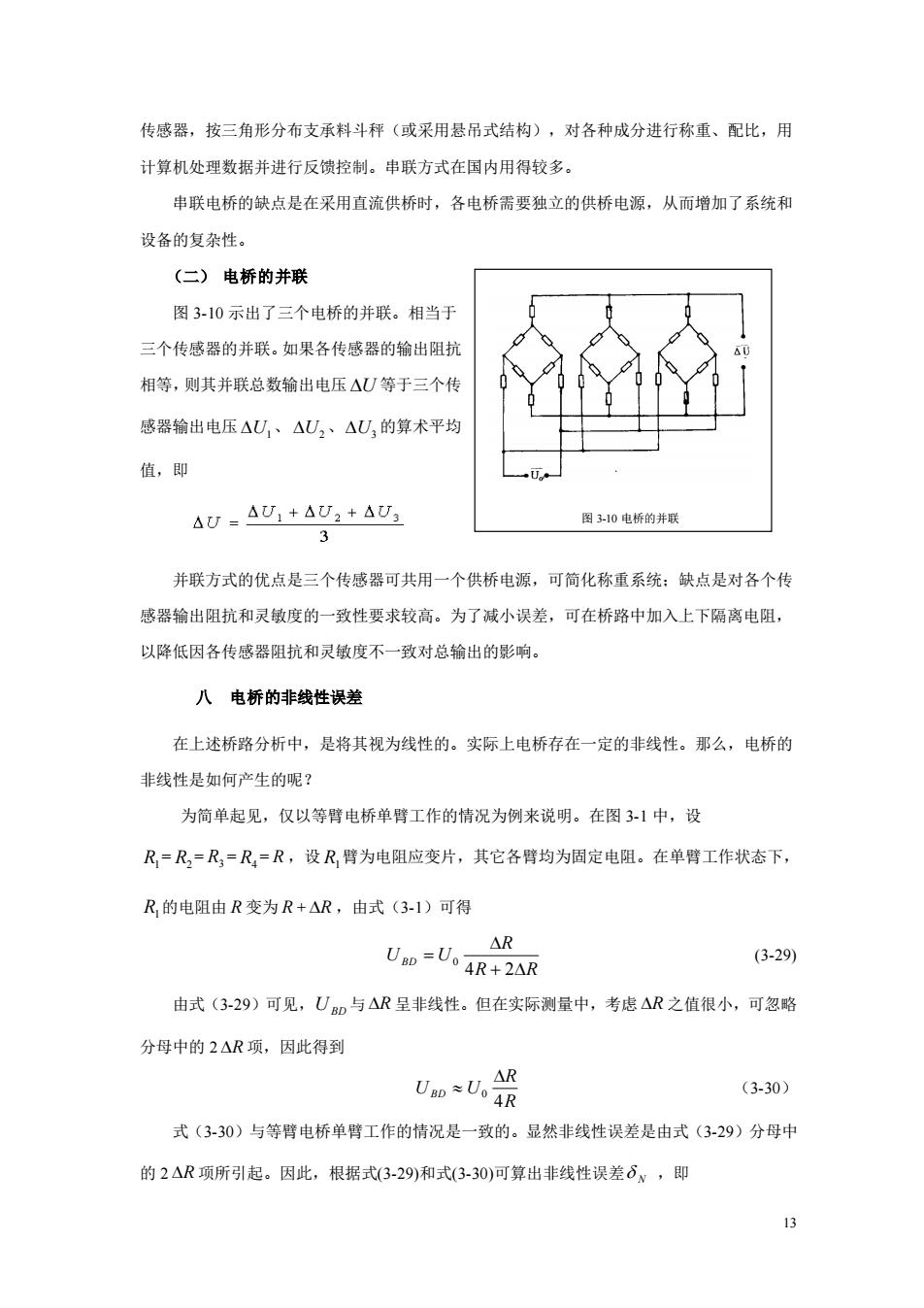
传感器,按三角形分布支承料斗秤(或采用悬吊式结构),对各种成分进行称重、配比,用计算机处理数据并进行反馈控制。串联方式在国内用得较多。串联电桥的缺点是在采用直流供桥时,各电桥需要独立的供桥电源,从而增加了系统和设备的复杂性。(二)电桥的并联图3-10示出了三个电桥的并联。相当于三个传感器的并联。如果各传感器的输出阻抗相等,则其并联总数输出电压AU等于三个传感器输出电压AU、AU,、AU,的算术平均值,即U.AU - AU +AU,+AU?图3-10电桥的并联并联方式的优点是三个传感器可共用一个供桥电源,可简化称重系统:缺点是对各个传感器输出阻抗和灵敏度的一致性要求较高。为了减小误差,可在桥路中加入上下隔离电阻,以降低因各传感器阻抗和灵敏度不一致对总输出的影响。八电桥的非线性误差在上述桥路分析中,是将其视为线性的。实际上电桥存在一定的非线性。那么,电桥的非线性是如何产生的呢?为简单起见,仅以等臂电桥单臂工作的情况为例来说明。在图3-1中,设R=R=R,=R,=R,设R,臂为电阻应变片,其它各臂均为固定电阻。在单臂工作状态下,R,的电阻由R变为R+AR,由式(3-1)可得AR(3-29)Uap =U.4R+2AR由式(3-29)可见,UBD与AR呈非线性。但在实际测量中,考虑AR之值很小,可忽略分母中的2AR项,因此得到Ua*U.%(3-30)式(3-30)与等臂电桥单臂工作的情况是一致的。显然非线性误差是由式(3-29)分母中的2△R项所引起。因此,根据式(3-29)和式(3-30)可算出非线性误差8%,即13
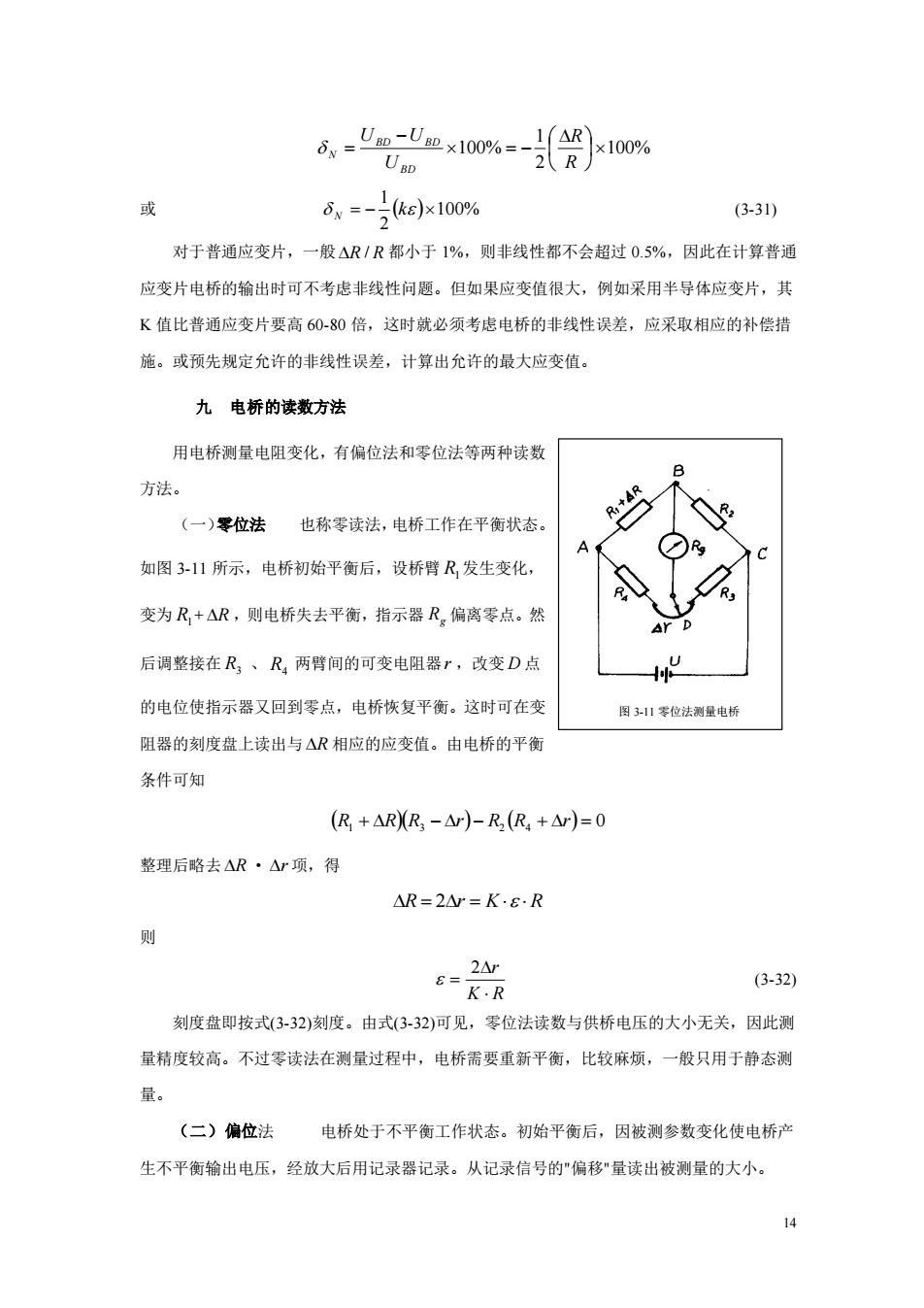
13 传感器,按三角形分布支承料斗秤(或采用悬吊式结构),对各种成分进行称重、配比,用 计算机处理数据并进行反馈控制。串联方式在国内用得较多。 串联电桥的缺点是在采用直流供桥时,各电桥需要独立的供桥电源,从而增加了系统和 设备的复杂性。 (二) 电桥的并联 图 3-10 示出了三个电桥的并联。相当于 三个传感器的并联。如果各传感器的输出阻抗 相等,则其并联总数输出电压 U 等于三个传 感器输出电压 U1、 U2、U3 的算术平均 值,即 并联方式的优点是三个传感器可共用一个供桥电源,可简化称重系统;缺点是对各个传 感器输出阻抗和灵敏度的一致性要求较高。为了减小误差,可在桥路中加入上下隔离电阻, 以降低因各传感器阻抗和灵敏度不一致对总输出的影响。 八 电桥的非线性误差 在上述桥路分析中,是将其视为线性的。实际上电桥存在一定的非线性。那么,电桥的 非线性是如何产生的呢? 为简单起见,仅以等臂电桥单臂工作的情况为例来说明。在图 3-1 中,设 R1 = R2 = R3 = R4 = R ,设 R1 臂为电阻应变片,其它各臂均为固定电阻。在单臂工作状态下, R1 的电阻由 R 变为 R + R ,由式(3-1)可得 R R R UBD U + = 4 2 0 (3-29) 由式(3-29)可见, UBD 与 R 呈非线性。但在实际测量中,考虑 R 之值很小,可忽略 分母中的 2 R 项,因此得到 R R UBD U 4 0 (3-30) 式(3-30)与等臂电桥单臂工作的情况是一致的。显然非线性误差是由式(3-29)分母中 的 2 R 项所引起。因此,根据式(3-29)和式(3-30)可算出非线性误差 N ,即 图 3-10 电桥的并联
Up-UBD ×100%=-1(μR)×100%SNE2(R)UBD8y =-(ke)×100%或(3-31)对于普通应变片,一般△R/R都小于1%,则非线性都不会超过0.5%,因此在计算普通应变片电桥的输出时可不考虑非线性问题。但如果应变值很大,例如采用半导体应变片,其K值比普通应变片要高60-80倍,这时就必须考虑电桥的非线性误差,应采取相应的补偿措施。或预先规定允许的非线性误差,计算出允许的最大应变值。九电桥的读数方法用电桥测量电阻变化,有偏位法和零位法等两种读数方法。(一)零位法也称零读法,电桥工作在平衡状态。如图3-11所示,电桥初始平衡后,设桥臀R,发生变化,变为R,+AR,则电桥失去平衡,指示器R。偏离零点。然后调整接在R,R两臂间的可变电阻器r,改变D点的电位使指示器又回到零点,电桥恢复平衡。这时可在变图3-11零位法测量电阻器的刻度盘上读出与AR相应的应变值。由电桥的平衡条件可知(R +AR)(R, -Ar)-R(R, +Ar)=0整理后略去AR·Ar项,得AR=2Nr=K.c-R则24r(3-32)6=K·R刻度盘即按式(3-32)刻度。由式(3-32)可见,零位法读数与供桥电压的大小无关,因此测量精度较高。不过零读法在测量过程中,电桥需要重新平衡,比较麻烦,一般只用于静态测量。(二)偏位法电桥处于不平衡工作状态。初始平衡后,因被测参数变化使电桥产生不平衡输出电压,经放大后用记录器记录。从记录信号的"偏移"量读出被测量的大小
14 100% 2 1 100% = − − = R R U U U BD BD BD N 或 ( ) 100% 2 1 N = − k (3-31) 对于普通应变片,一般 R / R 都小于 1%,则非线性都不会超过 0.5%,因此在计算普通 应变片电桥的输出时可不考虑非线性问题。但如果应变值很大,例如采用半导体应变片,其 K 值比普通应变片要高 60-80 倍,这时就必须考虑电桥的非线性误差,应采取相应的补偿措 施。或预先规定允许的非线性误差,计算出允许的最大应变值。 九 电桥的读数方法 用电桥测量电阻变化,有偏位法和零位法等两种读数 方法。 (一)零位法 也称零读法,电桥工作在平衡状态。 如图 3-11 所示,电桥初始平衡后,设桥臂 R1 发生变化, 变为 R1 + R ,则电桥失去平衡,指示器 Rg 偏离零点。然 后调整接在 R3 、 R4 两臂间的可变电阻器 r ,改变 D 点 的电位使指示器又回到零点,电桥恢复平衡。这时可在变 阻器的刻度盘上读出与 R 相应的应变值。由电桥的平衡 条件可知 (R1 + R)(R3 − r)− R2 (R4 + r) = 0 整理后略去 R · r 项,得 R = 2r = K R 则 K R r = 2 (3-32) 刻度盘即按式(3-32)刻度。由式(3-32)可见,零位法读数与供桥电压的大小无关,因此测 量精度较高。不过零读法在测量过程中,电桥需要重新平衡,比较麻烦,一般只用于静态测 量。 (二)偏位法 电桥处于不平衡工作状态。初始平衡后,因被测参数变化使电桥产 生不平衡输出电压,经放大后用记录器记录。从记录信号的"偏移"量读出被测量的大小。 图 3-11 零位法测量电桥

由式(3-30)可知,偏位法的读数值与供桥电压的大小有关,故桥压必须稳定。动态信号测量必须使用偏位法
15 由式(3-30)可知,偏位法的读数值与供桥电压的大小有关,故桥压必须稳定。动态信号测 量必须使用偏位法