第一章 1.试比较开环控制系统和闭环控制系统的优缺点。 2.如题图1-1(a)、(b)所示两水位控制系统,要求: 画出方块图(包括给定输入量和扰动输入量): ·分析工作原理,讨论误差和扰动的关系。 进 O ☒减速器 放大器电动机 用户 (b) 图1-1 3.如题图1-2所示炉温控制系统,要求(1)指出系统输出量、给定输入量、扰动输入量 被控对象和自动控制器的各组成部分并画出方块图:(2)说明该系统是怎样得到消除或减少 偏差的。 十 功率 信号 放大 n 电机 220 图1-2 4.举出五个身边控制系统的例子,试用职能方块图说明其基本原理,并指出是开环还是闭环。 5.双输入控制系统的一个常见例子是由冷热两个阀门的家用沐浴器。目标是同时控制水温和 流量,画出此闭环系统的方块图,你愿意让别人给你开环控制的沐浴器吗?
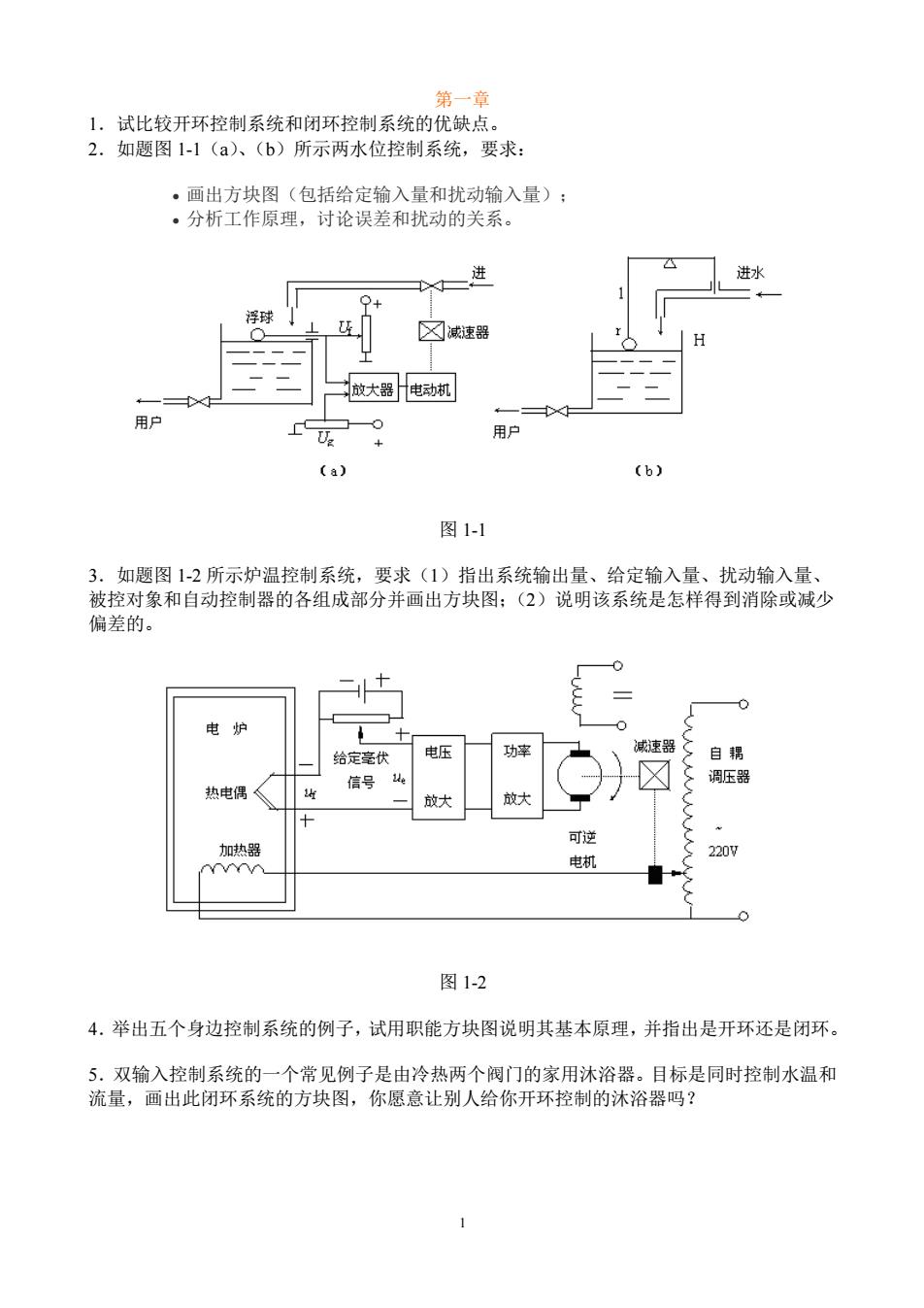
1 第一章 1.试比较开环控制系统和闭环控制系统的优缺点。 2.如题图 1-1(a)、(b)所示两水位控制系统,要求: • 画出方块图(包括给定输入量和扰动输入量); • 分析工作原理,讨论误差和扰动的关系。 图 1-1 3.如题图 1-2 所示炉温控制系统,要求(1)指出系统输出量、给定输入量、扰动输入量、 被控对象和自动控制器的各组成部分并画出方块图;(2)说明该系统是怎样得到消除或减少 偏差的。 图 1-2 4.举出五个身边控制系统的例子,试用职能方块图说明其基本原理,并指出是开环还是闭环。 5.双输入控制系统的一个常见例子是由冷热两个阀门的家用沐浴器。目标是同时控制水温和 流量,画出此闭环系统的方块图,你愿意让别人给你开环控制的沐浴器吗?
第二章 1.试求下列函数的拉氏变换 (1)f)=(4r+5)6)+(t+2)1) 2f0=6s31-45)-1u-至 (3)f)=e6(cos8+0.25sin8 2.试求下列函数的拉氏反变换 1)FS)=5+2Xs+3) s+1 (2)F(S)= s-1 (3)FS=5+Ds+2 4 (4)FS)=+5+4 3.对题图21所示的控制系统,计算(),(⑨」 H3() R()+ G(⊙ 0,(c H() 图2-1 4,系统结构如题图2,2所示。试分别用结构图化简方法和梅逊公式法求传递函数C心)/R R附 G⊙ g2)G(⑨ 图2-2 5.系统结构图如题图2-3所示。求传递函数C)/R份及8)/
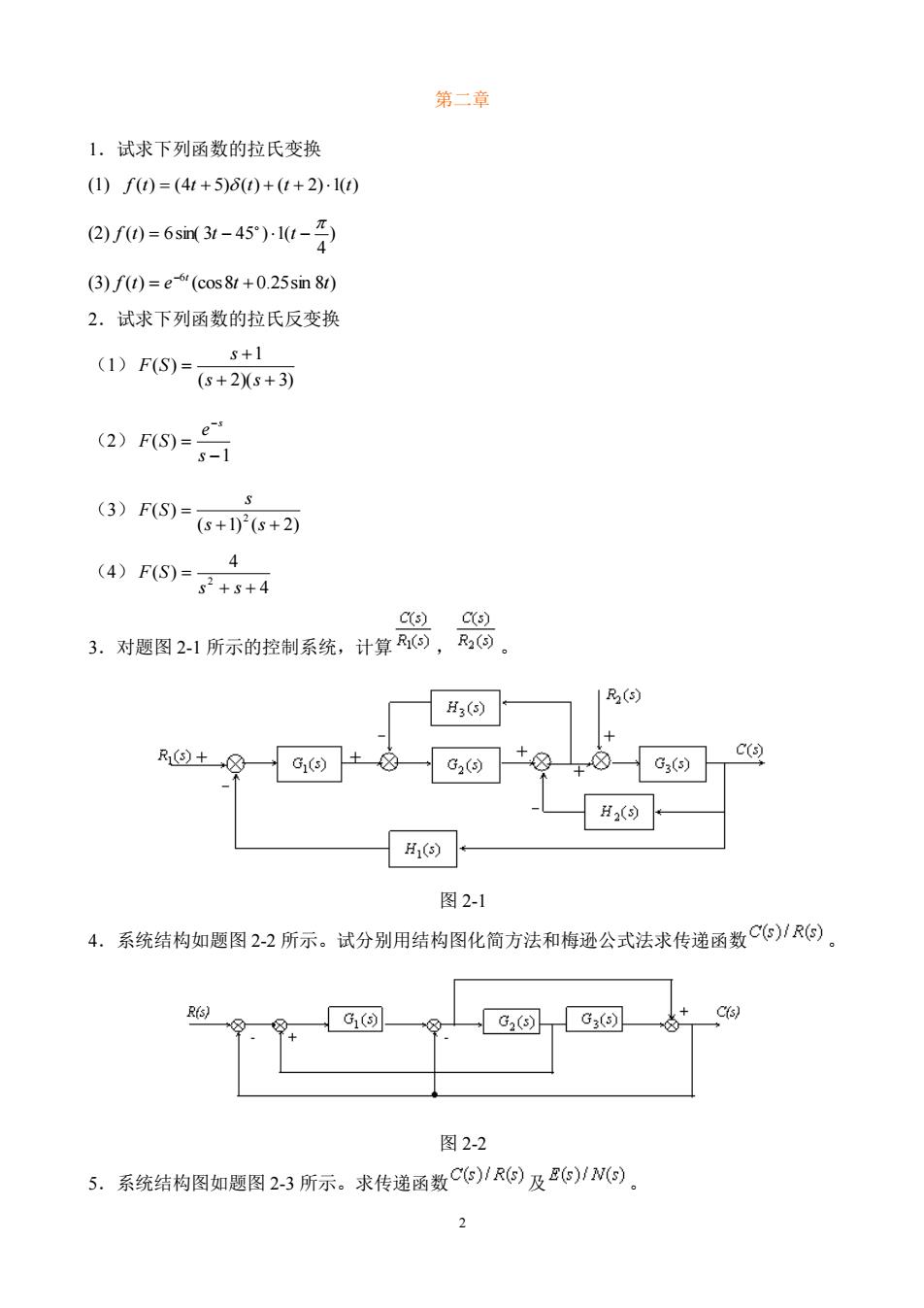
2 第二章 1.试求下列函数的拉氏变换 (1) f (t) = (4t + 5) (t) + (t + 2)1(t) (2) ) 4 ( ) 6sin( 3 45 ) 1( f t = t − t − (3) ( ) (cos8 0.25sin 8 ) 6 f t e t t t = + − 2.试求下列函数的拉氏反变换 (1) ( 2)( 3) 1 ( ) + + + = s s s F S (2) 1 ( ) − = − s e F S s (3) ( 1) ( 2) ( ) 2 + + = s s s F S (4) 4 4 ( ) 2 + + = s s F S 3.对题图 2-1 所示的控制系统,计算 , 。 图 2-1 4.系统结构如题图 2-2 所示。试分别用结构图化简方法和梅逊公式法求传递函数 。 图 2-2 5.系统结构图如题图 2-3 所示。求传递函数 及

型g ,型 图2-3 6.试列写题图2-4所示双输入-双输出机械位移系统的微分方程并画出系统结构图。 图2-4 第三章 C(s)+b 1,考虑一个单位反馈控制系统,其闭环传递函数为 R(s)s2+as+b (1)试确定其开环传递函数G()。 (2)求单位斜坡输入时的稳态误差。 2.已知单位反馈系统的单位阶跃响应为0=1+02。-12.,求 (1)开环传递函数G: (2)50w5,:
3 图 2-3 6.试列写题图 2-4 所示双输入-双输出机械位移系统的微分方程并画出系统结构图。 图 2-4 第三章 1.考虑一个单位反馈控制系统,其闭环传递函数为 (1)试确定其开环传递函数 G(s)。 (2)求单位斜坡输入时的稳态误差。 2.已知单位反馈系统的单位阶跃响应为 ,求 (1)开环传递函数 ; (2) ;
(3)在0-2+242作用下的稳态误差。 3.设单位反债整制系统的开环传递通数为9~G,4网。已知系统在单位阶跃作用下的 误差响应为)-2e-,试求系统的阻尼比5,自然须率,和在单位斜坡输入作用下的稳 态误差。 4.设题图3-1()所示系统的单位阶跃响应曲线如图3-1(b)所示,试确定参数1、2和 a的数值。 21810 2.00 附图 C sis+a) 08 b 题图3-1 5.设复合控制系统如题图3-2所示,要求: (1)计算扰动n(t)=t引起的稳态误差: (2)设计C,使系统在r(t)=t作用下无稳态误差。 K: N( t) K3 图3-2 6.己知系统结构如题图3-3所示,试求:当r(t)=t,n(t)=1(t)时的稳态误差
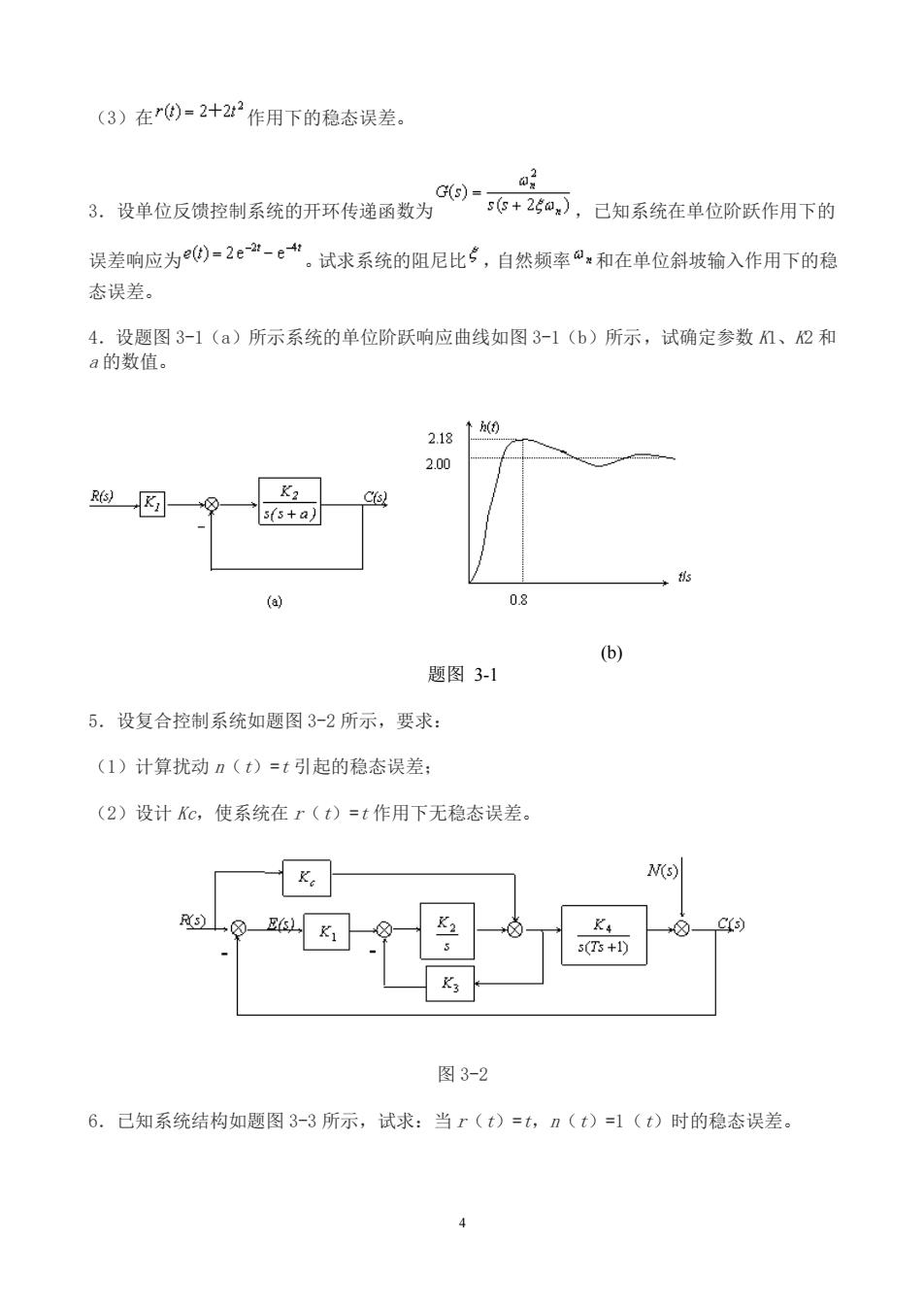
4 (3)在 作用下的稳态误差。 3.设单位反馈控制系统的开环传递函数为 ,已知系统在单位阶跃作用下的 误差响应为 。试求系统的阻尼比 ,自然频率 和在单位斜坡输入作用下的稳 态误差。 4.设题图 3-1(a)所示系统的单位阶跃响应曲线如图 3-1(b)所示,试确定参数 K1、K2 和 a 的数值。 (b) 题图 3-1 5.设复合控制系统如题图 3-2 所示,要求: (1)计算扰动 n(t)=t 引起的稳态误差; (2)设计 Kc,使系统在 r(t)=t 作用下无稳态误差。 图 3-2 6.已知系统结构如题图 3-3 所示,试求:当 r(t)=t,n(t)=1(t)时的稳态误差
+1 1 CO 图3-3 7.设单位反馈系统的开环传递函数为 G(5)=s(0.1s+1) 500 当下列输入时,求其稳态误差 )0= 2 (2)x,(0=1+21+21 8.某单位反馈系统,其开环传递函数为 10 GS)=s0.1s+) (1)试求静态误差系数k。,k,k。 (2)当输入为x0=a,+a1+受时,试求系统的稳态误差。 9.如图3一4所示系统,当x,()=10+21时,试求系统的稳态误差: 当x,()=s(6)时,试求稳态时误差的幅值。 图3-4 10.某系统的方块图如图3一5所示
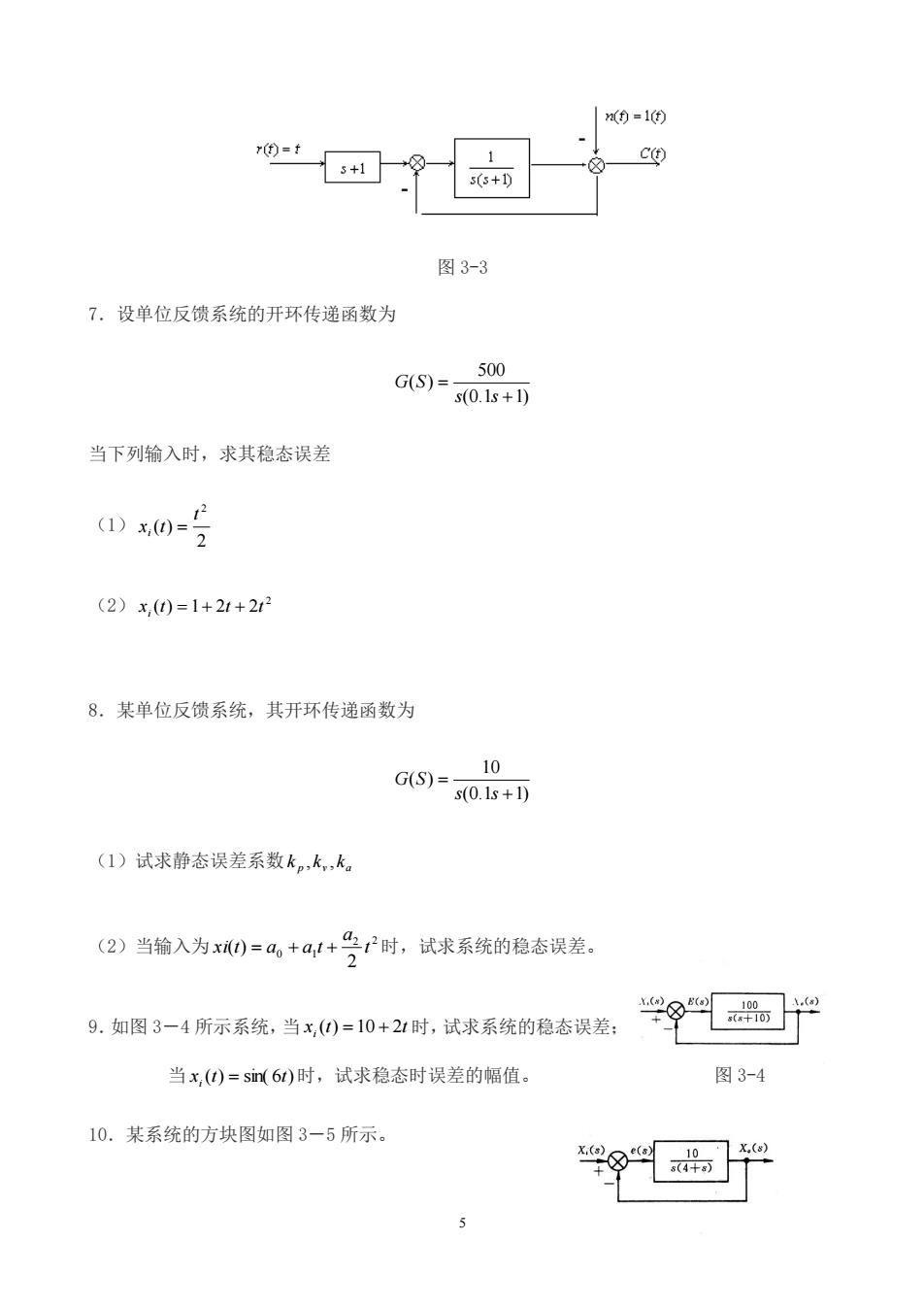
5 图 3-3 7.设单位反馈系统的开环传递函数为 (0.1 1) 500 ( ) + = s s G S 当下列输入时,求其稳态误差 (1) 2 ( ) 2 t x t i = (2) 2 x (t) 1 2t 2t i = + + 8.某单位反馈系统,其开环传递函数为 (0.1 1) 10 ( ) + = s s G S (1)试求静态误差系数 p v a k , k , k (2)当输入为 2 2 0 1 2 ( ) t a xi t = a + a t + 时,试求系统的稳态误差。 9.如图 3-4 所示系统,当 x t t i ( ) = 10 + 2 时,试求系统的稳态误差; 当 x (t) sin( 6t) i = 时,试求稳态时误差的幅值。 10.某系统的方块图如图 3-5 所示。 图 3-4