第三章时间响应分析 讲授内容 3.1时间响应及其组成 一、时间响应 时间响应是指系统的响应(输出)在时域上的表现形式,或 系统的动力学方程在一定初始条件下的解。 二、时间响应的组成 对于一个n阶线性定常系统,输入x,)与输出x,)之间关系的微 分方程 ax。00+an-lx。"-(0+.+a)+ax.0) =6.“0+b0++60+6x0 (n2m) 设其特征根为s=12,),则系统的时间响应可表示成 x0=0+立A,e”+24,e” (3.1.1) 按响应的来源分为零状态响应和零输入响应。其中,零状态 响应是指初始状态为零时,由系统的输入引起的响应,即 B0+立A,”:零输入响应是指系统的输入为零时,由初始状态引 起的响应,即A”。在控制工程中,如无特别声明,所讲的响 应往往是零状态响应。 时间响应还可按其性质分为强迫响应项),自由响应项
第三章 时间响应分析 讲授内容 3.1 时间响应及其组成 一、时间响应 时间响应是指系统的响应(输出)在 时域上的表现形式,或 系统的动力学方程在一定初始条件下的解。 二、时间响应的组成 对于一个 n阶线性定常系统,输 入 与输出 之间关系的微 分方程 x (t) i x (t) o ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 0 ( 1) 1 ( ) 1 0 ( 1) 1 ( ) b x t b x t b x t b x t a x t a x t a x t a x t i i m m i m m i o o n n o n n o = + + + + + + + + − − − − L & L & (n ≥ m) 设其特征根为 si (i =1,2,L, n),则系统的时间响应可表示成 ∑ ∑ = = = + + n i s t i n i s t o i i i x t B t A e A e 1 2 1 1 ( ) ( ) ( 3.1.1) 按响应的来源分为零状态响应和零输入响应。其中,零状态 响应是指初始状态为零时,由系统的输入引起的响应,即 ; 零输入响应是指系统的输入为零时, 由初始状态引 起的响应, 即 ∑ 。 在 控制工程中, 如无特别声明, 所讲的响 应往往是零状态响应。 ∑= + n i s t i i B t A e 1 1 ( ) = n i s t i i A e 1 2 时间响应还可按其性质分为强迫响应项 B(t) ,自由响应项
空ev空uew 三、微分方程特征根的意义 由式(3.1.1)可知,若系统的所有特征根s=12,.,m)均具有负 实部,即Rs,<0,则其自由响应项立4e“+24e“最终会趋于0, 也就是说系统的自由响应项收敛。这种系统称为稳定系统。此时 自由响应项又称为瞬态响应项,强迫响应项又称为稳态响应项 相反地,若系统存在具有正实部的特征根s,即Res,]>0,则有其 自由响应项4,”+∑4,e“最终会趋于无穷大,即系统的自由响应 项发散。这种系统称为不稳定系统。若系统有一个特征根的实部 为0,而其余特征根的实部均为负数,则其自由响应项 立4,e”+立4,e"最终会变成一等幅振荡,这种系统称为临界稳定系 统。 因此,系统特征根的实部决定了系统的稳定与否。若系统特 征根的实部全部都小于零,则系统稳定:若系统特征根的实部不 全小于零,则系统不稳定。由系统特征根与系统传递函数极点之 间的对应关系,还可得系统稳定的另一判据:若系统传递函数的 所有极点均分布在[$]平面的左半平面内,则系统稳定:若系统传 递函数在[s]平面的右半平面内存在极点,则系统不稳定。 对于稳定系统,Rs,]绝对值的大小决定了它所对应的自由响 应项衰减的快慢。Rs,]绝对值越大,则它所对应的的自由响应项 衰减得越快;反之亦然。而系统特征根的虚部ms,]的分布情况在 很大程度上决定了系统自由响应的振荡情况,绝对值越大,则自 由响应项振荡频率越高,它决定了系统的响应在规定时间内接近 稳态响应的情况,这影响着系统响应的准确性
∑ ∑ = = + n i s t i n i s t i i i A e A e 1 2 1 1 。 三、微分方程特征根的意义 由 式( 3.1.1)可知,若系统的所有特征根 s (i 1,2, , n) i = L 均具有负 实部,即 Re[si ] < 0,则其自由响应项 最终会趋于 0, 也就是说系统的自由响应项收敛。这种系统称为稳定系统。此 时 自由响应项又称为瞬态响应项,强迫响应项又称为稳态响应项。 相反地, 若系统存在具有正实部的特征根 , 即 , 则有其 自由响应项 最终会趋于无穷大,即系统的自由响应 项发散。这种系统称为不稳定系统。若系统有一个特征根的实部 为 0 ,而其余特征根的实部均为负数,则其自由响应项 最终会变成一等幅振荡,这种系统称为临界稳定系 统 。 ∑ ∑ = = + n i s t i n i s t i i i A e A e 1 1 1 1 i s Re[si ] > 0 ∑ ∑ = = + n i s t i n i s t i i i A e A e 1 2 1 1 ∑ ∑ = = + n i s t i n i s t i i i A e A e 1 2 1 1 因此,系统特征根的实部决定了系统 的稳定与否。若系统特 征根的实部全部都小于零,则系统稳定;若系统特征根的实部不 全小于零,则系统不稳定。由系统特征根与系统传递函数极点之 间的对应关系,还可得系统稳定的另一判据:若系统传递函数的 所有极点均分布在 [s]平面的左半平面内,则系统稳定;若系统传 递函数在 [s]平面的右半平面内存在极点,则系统不稳定。 对于稳定系统, 绝对值的大小决定了它所对应的自由响 应项衰减的快慢。 绝对值越大,则它所对应的的自由响应项 衰减得越快;反之亦然。而系统特征根的虚部 的分布情况在 很大程度上决定了系统自由响应的振荡情况,绝对值越大,则 自 由响应项振荡频率越高,它决定了系统的响应在规定时间内接近 稳态响应的情况,这影响着系统响应的准确性。 Re[ ]i s Re[ ]i s Im[ ]i s
3.2典型输入信号 在控制工程中,常用的输入信号有两大类。其一是系统正常 工作时的输入信号:其二是外加的测试信号,包括单位脉冲信号 单位阶跃信号、单位斜坡信号、正弦信号和某些随机信号等。输 入信号的选择要综合考虑系统的工作条件和实验的目的。 3.3一阶系统的时间响应 一、一阶系统 一阶系统传递函数的一般形式为 C 式中,T称为一阶系统的时间常数,K称为一阶系统的增益。 二、一阶系统的单位脉冲响应) 0=rxo=rK6o1=1-s立 (120) )只有瞬态项,而其稳态项为零。即一阶系统的单位脉冲 响应函数是一个递减的指数函数。 对一阶系统而言,将其单位脉冲响应曲线衰减到初值的2%之 前的过程定义为过渡过程,称此过程经历的时间为过渡过程时间 或调整时间,记为1,。经过计算可得一阶系统的调整时间为4T。 显然,系统的时间常数T愈小,其过渡过程的持续时间愈短,亦 即系统的惯性愈小,系统对输入信号反应的快速性愈好
3.2 典型输入信号 在控制工程中,常用的输入信号有两 大类。其一是系统正常 工作时的输入信号;其二是外加的测试信号,包括单位脉冲信号、 单位阶跃信号、单位斜坡信号、正弦信号和某些随机信号等。输 入信号的选择要综合考虑系统的工作条件和实验的目的。 3.3 一阶系统的时间响应 一、一阶系统 一阶系统传递函数的一般形式为 ( ) 1 ( ) ( ) + = = Ts K X s X s G s i o 式中, T 称为一阶系统的时间常数, K 称为一阶系统的增益。 二、一阶系统的单位脉冲响应w(t) ( ) [ ( )] 1 w t L X s o − = [ ( ) ( )] 1 L X s G s i = ⋅ − ] 1 [ 1 + = − Ts K L T t e T K − = ⋅ (t ≥ 0) w(t) 只有瞬态项,而其稳态项为零。即一阶系统的单位脉冲 响应函数是一个递减的指数函数。 对一阶系统而言,将其单位脉冲响应曲线衰减到初值的 之 前的过程定义为过渡过程,称此过程经历的时间为过渡过程时间 或调整时间,记为 。经过计算可得一阶系统的调整时间为 2% s t 4T 。 显然, 系统的时间常数 T 愈小, 其过渡过程的持续时间愈短, 亦 即系统的惯性愈小,系统对输入信号反应的快速性愈好
三、一阶系统的单位阶跃响应x() 20-.-G) =K0-e)u≥0) x)的瞬态项为-K片,其稳态项为K。即一阶系统的单位阶 跃响应函数是一个递增的指数函数。 对一阶系统而言,过渡过程还可定义为其阶跃响应增长到稳 态值的98%之前的过程,同样可算得相应的时间为4T。因此,时 间常数T确实反映了一阶系统的固有特性,其值愈小,系统的惯 性就愈小,系统的响应也就愈快。 四、线性系统输出与输入的关系 考察一阶系统的单位阶跃响应函数x()与单位脉冲响应函数 (),可知它们之间的关系为:元)=w),并且其输入的关系为: )=6)。事实上,对于任意线性系统而言,若一个输入A是另 一个输入B的导函数,则输入A所引起的输出就是输入B所引 起输出的导函数:同样地,若一个输入A是另一个输入B的积 分,则输入A所引起的输出就是输入B所引起输出的积分,但 是,如果积分是不定积分,则还需要确定积分常数。 3.4二阶系统的时间响应 一、二阶系统 二阶系统的传递函数有如下两种形式: 00克8+ (3.4.1)
三、一阶系统的单位阶跃响应 x (t) ou ( ) [ ( )] [ ( ) ( )] 1 1 x t L X s L G s X s ou o i = = ⋅ − − ] 1 1 [ 1 Ts s K L ⋅ + = − (1 ) T t K e − = − (t ≥ 0) x (t) ou 的瞬态项为 T t Ke − − ,其 稳态项为 K 。即一阶系统的单位阶 跃响应函数是一个递增的指数函数。 对一阶系统而言,过渡过程还可定义 为其阶跃响应增长到稳 态值的 98%之前的过程, 同样可算得相应的时间为 4T 。 因此, 时 间常数 T 确实反映了一阶系统的固有特性, 其值愈小, 系统的惯 性就愈小,系统的响应也就愈快。 四、线性系统输出与输入的关系 考察一阶系统的单位阶跃响应函数 与单位脉冲响应函数 ,可 知 它 们 之 间 的 关 系 为 : x (t) ou w(t) x&ou (t) = w(t) ,并且其输入的关系为: u&(t) = δ (t) 。 事实上, 对于任意线性系统而言, 若一个输入 A 是 另 一个输入 B 的导函数,则输入 A 所引起的输出就是输入 B 所 引 起输出的导函数;同样地,若一个输入 A 是另一个输入 B 的 积 分,则输入 A 所引起的输出就是输入 B 所引起输出的积分,但 是,如果积分是不定积分,则还需要确定积分常数。 3.4 二阶系统的时间响应 一、二阶系统 二阶系统的传递函数有如下两种形式: 2 2 2 ( ) 2 ( ) ( ) n n n i o X s s s X s G s ξω ω ω + + = = ( 3.4.1)
或 G)=七国、 o2(s+四 (3.4.2) X,(s))s2+250.5+m 其中,5是二阶系统的特征参数,它们表明二阶系统本身的与 外界无关的固有特性。一般将式(3.4.1)所示的系统称为无零点 的二阶系统或典型的二阶系统,而将式(3.4.2)所示的系统称为 有零点的二阶系统。在不特别声明的情况下,本章讨论的是典型 二阶系统的时间响应。 二阶系统的特征方程是 s2+250n3+o2=0, 此方程的两个特征根是 S2=-50n±onVE-l (3.4.3) 由式(3.4.3)可见,随着阻尼比取值的不同,二阶系统的特 征根分布不同,亦即二阶系统传递函数的极点分布不同,其分布 情况如图(3.4.1)所示。不同的极点分布情况,决定了二阶系统 在不同的阻尼情况下,其自由响应项不同。由图(3.4.1)可知, 当<0时,即二阶系统出现负阻尼时,其传递函数的两个极点分 布在[s]平面的右半平面内,系统不稳定。因此,这里只讨论≥0 时,二阶系统的响应情况。 [] 0<< =1 (6》 (c) 图(3.4.1)
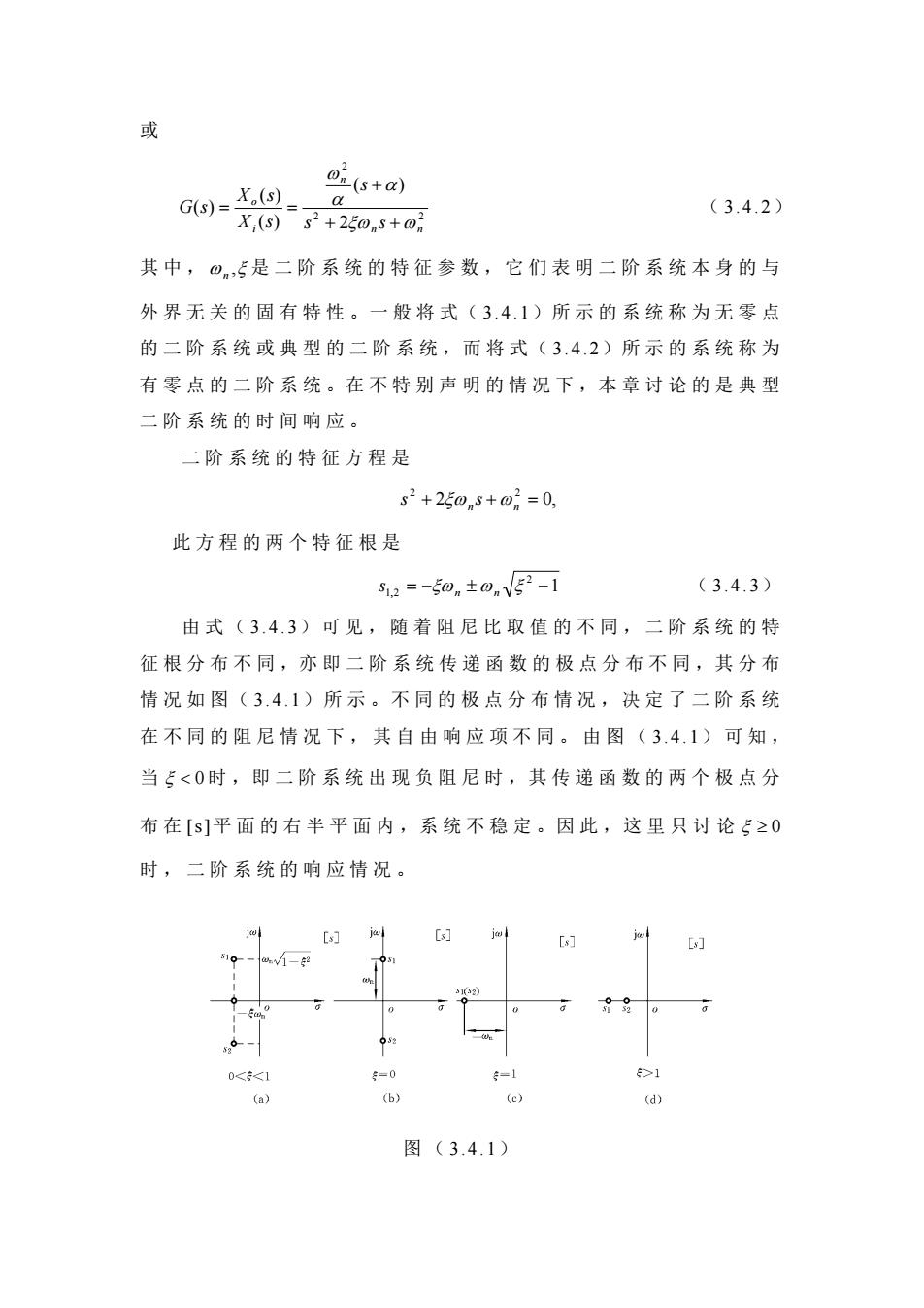
或 2 2 2 2 ( ) ( ) ( ) ( ) n n n i o s s s X s X s G s ξω ω α α ω + + + = = ( 3.4.2) 其中, ω n ,ξ 是二阶系统的特征参数,它们表明二阶系统本身的与 外界无关的固有特性。一般将式( 3.4.1)所示的系统称为无零点 的二阶系统或典型的二阶系统,而将式( 3.4.2)所示的系统称为 有零点的二阶系统。在不特别声明的情况下,本章讨论的是典型 二阶系统的时间响应。 二阶系统的特征方程是 2 0, 2 2 s + ξω n s +ω n = 此方程的两个特征根是 1 2 s1,2 = −ξω n ±ω n ξ − ( 3.4.3) 由 式 ( 3.4.3) 可见, 随着阻尼比取值的不同, 二阶系统的特 征根分布不同,亦即二阶系统传递函数的极点分布不同,其分布 情况如图( 3.4.1)所示。不同的极点分布情况,决定了二阶系统 在不同的阻尼情况下,其自由响应项不同。由图( 3.4.1)可知, 当 ξ < 0 时 ,即二阶系统出现负阻尼时,其传递函数的两个极点分 布 在 [s]平面的右半平面内,系统不稳定。因此,这里只讨论 ξ ≥ 0 时,二阶系统的响应情况。 图 ( 3.4.1)