
时域法 自动控制理论的内容 频域法 根轨迹法 线性 经典控制理论 描述函数法 (19世纪中叶- 20世纪50年代) 非线性 相平面法 李雅普诺夫法 自动控制理论 波波夫法 采样控制 Z变换法 状态反馈控制 最优控制 智能控制 现代控制 预测控制 理论(60 自适应控制 大系统多层分散控制 年代以来) 模糊控制
自 动 控 制 理 论 经典控制理论 (19世纪中叶- 20世纪50年代) 线性 非线性 波波夫法 李雅普诺夫法 描述函数法 相平面法 采样控制 Z变换法 现代控制 理论(60 年代以来) 状态反馈控制 自适应控制 时域法 频域法 最优控制 智能控制 模糊控制 根轨迹法 预测控制 大系统多层分散控制 •自动控制理论的内容
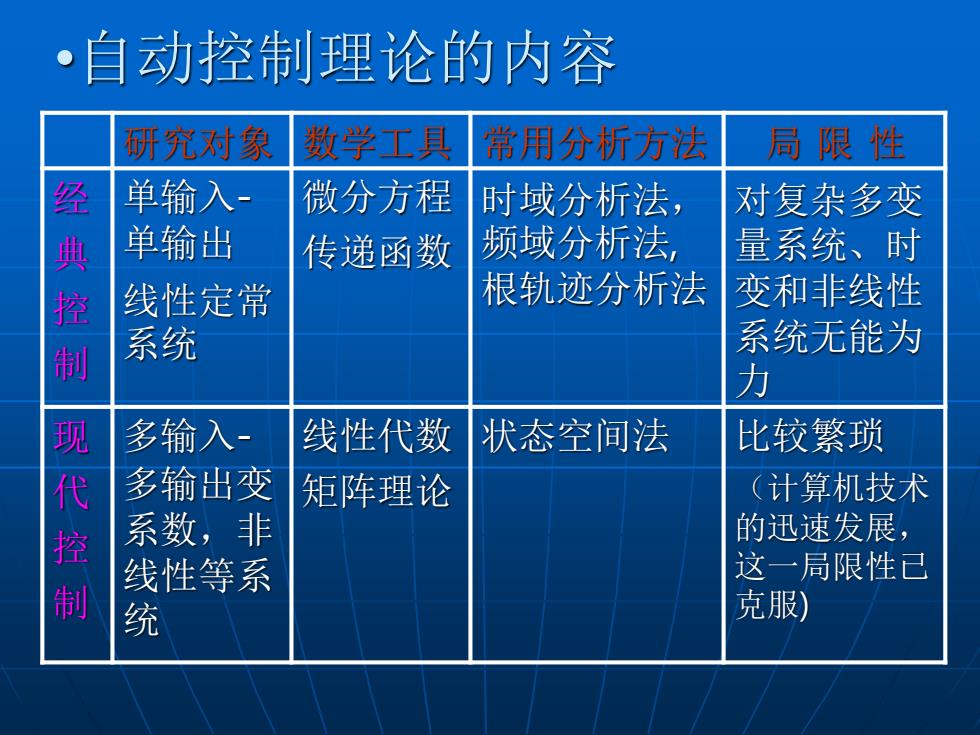
自动控制理论的内容 研究对象 数学工具 常用分析方法 局限性 经 单输入 微分方程 时域分析法, 对复杂多变 典 单输出 传递函数 频域分析法, 量系统、时 控 线性定常 根轨迹分析法 变和非线性 制 系统 系统无能为 力 现 多输入 线性代数 状态空间法 比较繁琐 代控制 多输出变 矩阵理论 (计算机技术 系数,非 的迅速发展, 线性等系 这一局限性已 克服)
研究对象 数学工具 常用分析方法 局 限 性 经 典 控 制 单输入- 单输出 线性定常 系统 微分方程 传递函数 时域分析法, 频域分析法, 根轨迹分析法 对复杂多变 量系统、时 变和非线性 系统无能为 力 现 代 控 制 多输入- 多输出变 系数,非 线性等系 统 线性代数 矩阵理论 状态空间法 比较繁琐 (计算机技术 的迅速发展, 这一局限性已 克服) •自动控制理论的内容
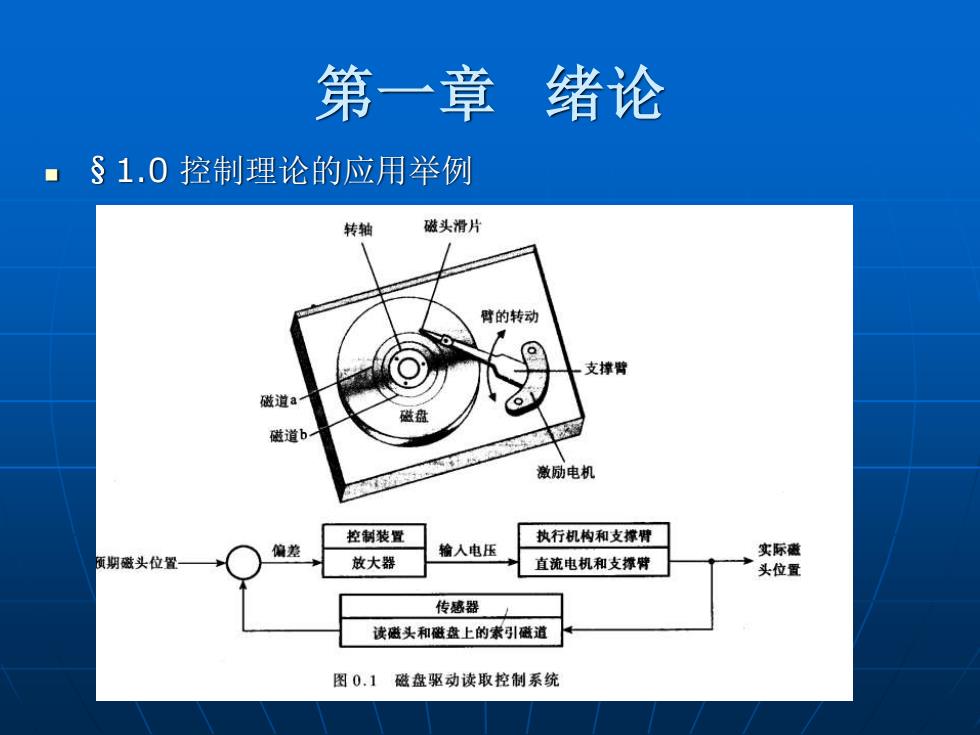
第一章 绪论 ·§1.0控制理论的应用举例 转轴 磁头滑片 臂的转动 支撑臂 磁道a 磁盘 磁道b 激励电机 控制装置 执行机构和支撑臂 偏差 输入电压 实际磁 质期磁头位置 放大器 直流电机和支撑臂 头位置 传感器 读磁头和磁盘上的素引磁道 图0.1磁盘驱动读取控制系统
第一章 绪论 ◼ §1.0 控制理论的应用举例
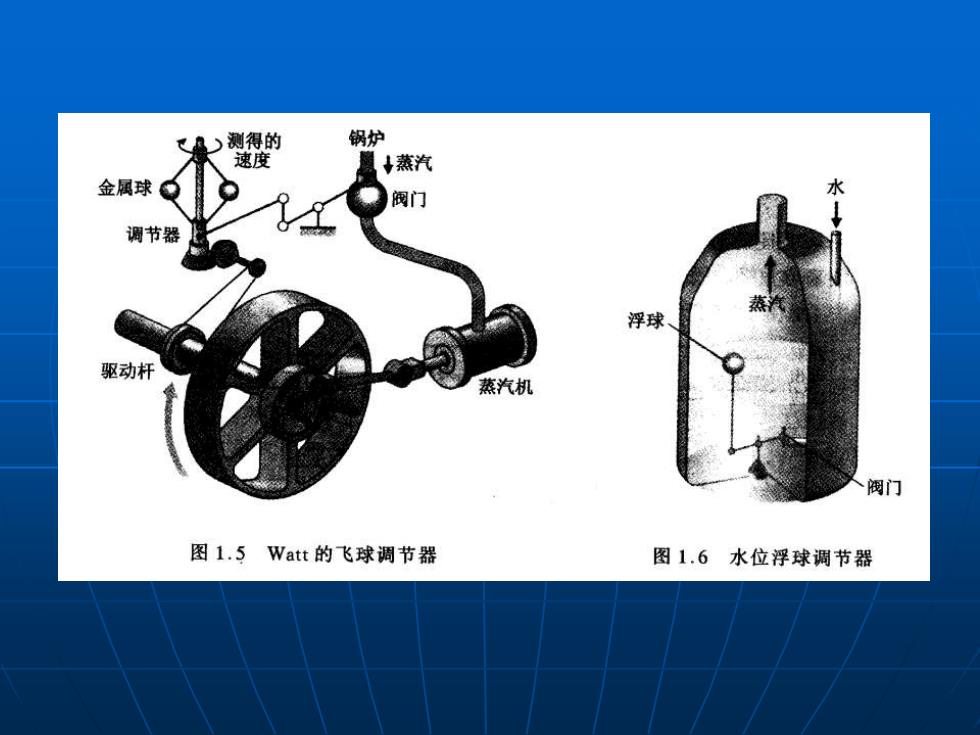
飞晶)测得的 锅炉 速度 魔↓蒸汽 金属球 水 阀门 调节器 浮球 驱动杆 蒸汽机 阀门 图1.5Watt的飞球调节器 图1.6水位浮球调节器
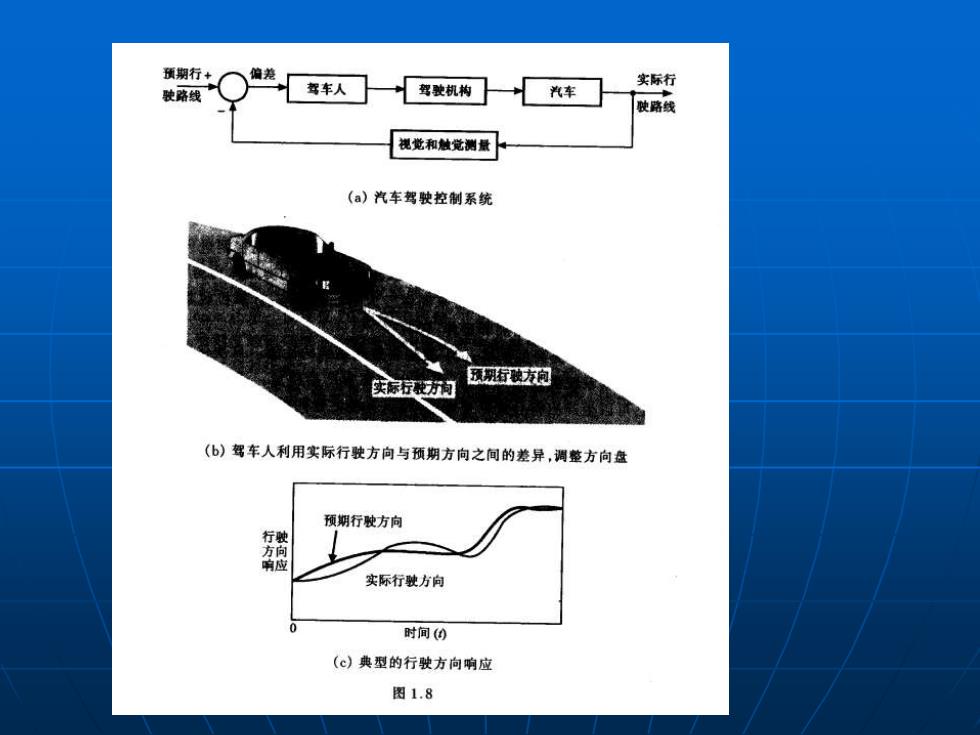
预期行+ 实际行 驶路线 每车人 驾驶机构 汽车 驶路线 视觉和触觉测量 (a)汽车驾驶控制系统 实标行驶行向 预别面驶方包 (b)驾车人利用实际行驶方向与预期方向之间的差异,调整方向盘 预期行驶方向 行玻 方向 南应 实际行驶方向 时间(④ (c)典型的行驶方向响应 图1.8