第一章绪论 讲授内容 1.1机械工程控制论的研究对象与任务 一、系统及广义系统 系统是由相互联系、相互作用的若干部分构成且具有一定运 动规律的一个有机整体。一个较大系统之内可能包括若干个较小 的子系统。不仅系统的各部分之间存在非常紧密的联系,而且, 系统与外界之间也存在一定的联系。系统与外界之间的联系如图 1.1.1所示,其中,输入:外界对系统的作用,它包括给定的输 入和干扰:输出:系统对外界的作用。 丝人系货出 图1.1.1系统及其与外界的联系 系统可大可小,可繁可简,甚至可“实”可“虚”,完全由研 究的需要而定,通常将它们统称为广义系统。 二、机械工程控制论的研究对象 机械工程控制论实质上是研究机械工程技术中广义系统的 动力学问题。具体地说,它研究的是机械工程广义系统在一定的 外界条件(即输入或激励、干扰)作用下,从系统的一定的初始 状态出发,所经历的由其内部的固有特性(即由系统的结构与参 数所决定的特性)所决定的整个动态历程:研究这一系统及其输 入、输出三者之间的动态关系。 三、机械工程控制论的研究任务 从系统、输入、输出三者之间的关系出发,根据已知条件与 求解问题的不同,机械工程控制论的任务可以分为以下五种:
第一章 绪论 讲授内容 1.1 机械工程控制论的研究对象与任务 一、系统及广义系统 系统是由相互联系、 相互作用的若干部分构成且具有一定运 动规律的一个有机整体。一个较大系统之内可能包括若干个较小 的子系统。不仅系统的各部分之间存在非常紧密的联系,而且, 系统与外界之间也存在一定的联系。系统与外界之间的联系如图 1.1.1 所示,其中,输入:外界对系统的作用 ,它包括给定的输 入和干扰;输出:系统对外界的作用。 图 1.1.1 系统及其与外界的联系 系统可大可小,可繁可简,甚至可“实”可“虚”,完全由研 究的需要而定,通常将它们统称为广义系统。 二、机械工程控制论的研究对象 机械工程控制论实质上是研究机械工程技术中广义系统的 动力学问题。具体地说,它研究的是机械工程广义系统在一定的 外界条件(即输入或激励、干扰)作用下,从系统的一定的初始 状态出发,所经历的由其内部的固有特性(即由系统的结构与参 数所决定的特性)所决定的整个动态历程;研究这一系统及其输 入、输出三者之间的动态关系。 三、机械工程控制论的研究任务 从系统、输入、输出三者之间的关系出发,根据已知条件与 求解问题的不同,机械工程控制论的任务可以分为以下五种:
(1)己知系统和输入,求系统的输出,即系统分析问题: (2)已知系统和系统的理想输出,设计输入,即最优控制问题: (3)己知输入和理想输出时,设计系统,即最优设计问题: (4)输出已知,确定系统,以识别输入或输入中的有关信息, 此即滤波与预测问题; (5)已知系统的输入和输出,求系统的结构与参数,即系统辨 识问题。 1.2系统及其模型 一、系统的特性 系统具有如下特性: (1)系统的性能不仅与系统的元素有关,而且还与系统的结构 有关: (2)系统的内容比组成系统各元素的内容要丰富得多: (3)系统往往具有表现出在时域、频域或空域等域内的动态特 性。 二、机械系统 以实现一定的机械运动、输出一定的机械能,以及承受一定 的机械载荷为目的的系统,称为机械系统。对于机械系统,其输 入和输出分别称为“激励”和“响应”。 三、系统模型 系统的模型包括实物模型、物理模型、和数学模型等等。而 数学模型又包括静态模型和动态模型。动态模型在一定的条件下 可以转换成静态模型。在控制理论或控制工程中,一般关心的是 系统的动态特性,因此,往往需要采用动态数学模型。即,一般 所指的系统的数学模型是描述系统动态特性的数学表达式。 1.3反馈 一、系统方框图及其组成
( 1)已知系统和输入,求系统的输出,即系统分析问题; ( 2)已知系统和系统的理想输出,设计输入,即最优控制问题; ( 3)已知输入和理想输出时,设计系统,即最优设计问题; ( 4)输出已知,确定系统 ,以识别输入或输入中的有关信息, 此即滤波与预测问题; ( 5)已知系统的输入和输 出,求系统的结构与参数,即系统辨 识问题。 1.2 系统及其模型 一、系统的特性 系统具有如下特性: ( 1)系统的性能不仅与系 统的元素有关,而且还与系统的结构 有关; ( 2)系统的内容比组成系统各元素的内容要丰富得多; ( 3)系统往往具有表现出 在时域、频域或空域等域内的动态特 性。 二、机械系统 以 实 现 一 定 的 机 械 运 动 、输 出 一 定 的 机 械 能 ,以 及 承 受 一 定 的机械载荷为目的的系统,称为机械系统。对于机械系统,其输 入 和 输 出 分 别 称 为 “ 激 励 ” 和 “ 响 应 ”。 三、系统模型 系统的模型包括实物模型、物理模型、和数学模型等等。而 数 学 模 型 又 包 括 静 态 模 型 和 动 态 模 型 。动 态 模 型 在 一 定 的 条 件 下 可 以 转 换 成 静 态 模 型 。在 控 制 理 论 或 控 制 工 程 中 ,一 般 关 心 的 是 系统的动态特性,因此,往往需要采用动态数学模型。即,一般 所指的系统的数学模型是描述系统动态特性的数学表达式。 1.3 反馈 一、系统方框图及其组成
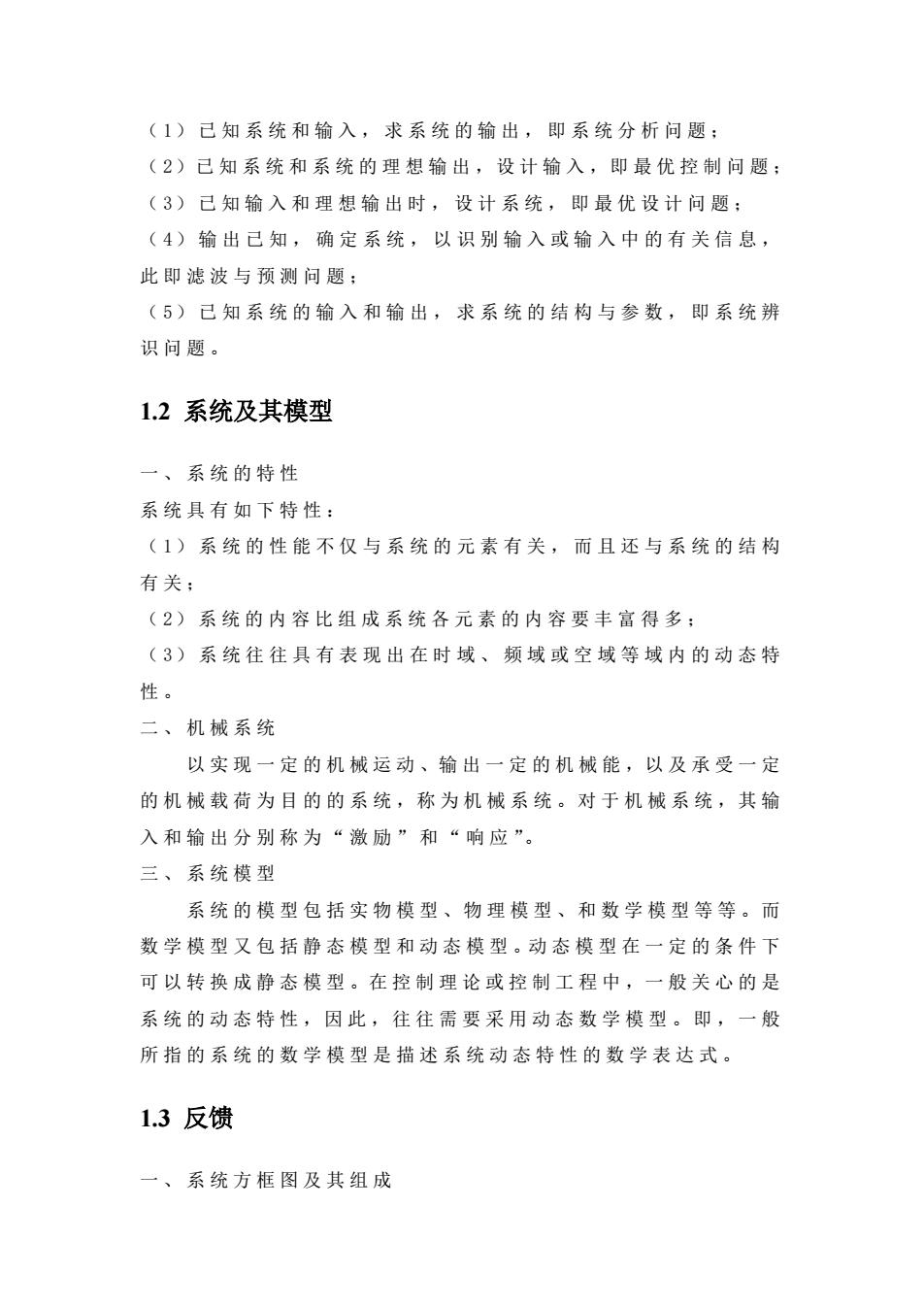
系统方框图由许多对信号(量)进行单向传递的元件方框和 一些连线组成,表征了系统各元件之间及系统与外界之间进行信 息交换的过程。它包括三个基本的单元,即 引出点(分支点):表示信号的引出或信号的分支,箭头表示 信号的传递方向,线上标记信号的名称,如图1.3.1.(a)所示。 比较点(相加点):表示两个或两个以上的信号进行相加或相 减运算。“+”表示信号相加:“.”表示信号相减,如图1.3.1.(b) 所示。 元件方框:方框中写入元、部件的名称,进入箭头表示其输入 信号:引出箭头表示其输出信号,如图1.3.1.(c)所示。 2”⑧±型五元廊件名 a引出点 b)比较点 )元件方轻 图1.3.1系统方框图的基本组成单元 二、信息及信息反馈的概念 信息:一切能表达一定意义的信号、符号和密码等统称为信 息。也可定义为事物运动的状态或方式。 反馈(信息反馈):将系统的输出以一定的方式返回到系统 的输入端并共同作用于系统的过程,称为反馈或信息反馈。 三、内反馈和外反馈 内反馈:在系统或过程中存在的各种自然形成的反馈,称为 内反馈。它是系统内部各个元素之间相互耦合的结果。内反馈是 造成机械系统存在一定的动态特性的根本原因,纷繁复杂的内反 馈的存在使得机械系统变得异常复杂。读者对于机械系统中普遍 存在的内反馈现象应引起足够的重视。 外反馈:在自动控制系统中,为达到某种控制目的而人为加 入的反馈,称为外反馈
系统方框图由许多对信号(量)进行 单向传递的元件方框和 一些连线组成,表征了系统各元件之间及系统与外界之间进行信 息交换的过程。它包括三个基本的单元,即 引出点(分支点):表示信号的引出或信号的分支,箭头表示 信号的传递方向,线上标记信号的名称,如图 1.3.1.( a)所示。 比较点(相加点):表示两个或两个以上的信号进行相加或相 减运算。“ +”表示信号相加;“ -”表示信号相减,如 图 1.3.1.( b) 所示。 元件方框:方框中写入元、部件的名称,进入箭头表示其输入 信号;引出箭头表示其输出信号,如图 1.3.1.( c)所示。 图 1.3.1 系统方框图的基本组成单元 二、信息及信息反馈的概念 信息:一切能表达一定意义的信号、符号和密码等统称为信 息。也可定义为事物运动的状态或方式。 反馈(信息反馈):将系统的输出以一定的方式返回到系统 的输入端并共同作用于系统的过程,称为反馈或信息反馈。 三、内反馈和外反馈 内反馈:在系统或过程中存在的各种自然形成的反馈,称 为 内反馈。它是系统内部各个元素之间相互耦合的结果。内反馈是 造成机械系统存在一定的动态特性的根本原因,纷繁复杂的内反 馈的存在使得机械系统变得异常复杂。读者对于机械系统中普遍 存在的内反馈现象应引起足够的重视。 外反馈:在自动控制系统中,为达到某种控制目的而人为加 入的反馈,称为外反馈
1.4系统的分类及对控制系统的基本要求 一、控制系统的基本概念 控制:通过对一定对象实施一定的操作,以使其按照预定的 规律运动或变化的过程。 被控对象:在控制理论和控制技术中,运动规律或状态需要 控制的装置或元件称为被控对象(控制对象)。被控对象可大可 小,甚至可“实”可“虚”。 控制器:在控制系统中,除被控对象以外的所有装置,统称 为控制器。 给定元件:控制系统中主要用于产生给定信号(输入信号、 希望值)的元件。 反馈元件(测量元件):控制系统中用于测量被控量(输出 量),产生反馈信号的元件。反馈信号与输出量之间往往存在确 定的函数关系。 比较元件:控制系统中用以比较输出信号与反馈信号,并求 取偏差信号的元件。有时并非为物理元件,可能通过物理定律或 其他定律实现。 放大元件:控制系统中对输入信号进行幅值放大或功率放大 的元件。 执行元件:控制系统中直接对被控对象进行操作的元件。 被控制量:表征被控对象运动规律或状态的物理量。实质上 是系统的输出(输出量)。 希望值:希望的被控对象运动规律或状态的物理量(或称输 入量、系统输入)。 偏差:系统的输入量与反馈量之差或之和(即比较环节的输 出值)。 控制量:被控对象的输入量。由于往往是偏差的某种函数, 因此,也可将偏差看成为控制量。 扰动量(干扰):指除给定量以外,所有使得被控制量偏离
1.4 系统的分类及对控制系统的基本要求 一 、 控 制 系 统 的 基 本 概 念 控 制 :通 过 对 一 定 对 象 实 施 一 定 的 操 作 ,以 使 其 按 照 预 定 的 规律运动或变化的过程。 被 控 对 象 :在 控 制 理 论 和 控 制 技 术 中 ,运 动 规 律 或 状 态 需 要 控制的装置或元件称为被控对象(控制对象)。被控对象可大可 小,甚至可“实”可“虚”。 控制器:在控制系统中,除被控对象以外的所有装置,统称 为控制器。 给定元件:控制系统中主要用于产生给定信号(输入信号、 希望值)的元件。 反馈元件(测量元件):控制系统中用于测量被控量(输出 量 ),产生反馈信号的元件。反馈信 号与输出量之间往往存在确 定的函数关系。 比 较 元 件 :控 制 系 统 中 用 以 比 较 输 出 信 号 与 反 馈 信 号 ,并 求 取 偏 差 信 号 的 元 件 。有 时 并 非 为 物 理 元 件 ,可 能 通 过 物 理 定 律 或 其他定律实现。 放 大 元 件 :控 制 系 统 中 对 输 入 信 号 进 行 幅 值 放 大 或 功 率 放 大 的元件。 执行元件:控制系统中直接对被控对象进行操作的元件。 被 控 制 量 :表 征 被 控 对 象 运 动 规 律 或 状 态 的 物 理 量 。实 质 上 是系统的输出(输出量)。 希 望 值 :希 望 的 被 控 对 象 运 动 规 律 或 状 态 的 物 理 量( 或 称 输 入量、系统输入)。 偏 差 :系 统 的 输 入 量 与 反 馈 量 之 差 或 之 和( 即 比 较 环 节 的 输 出值)。 控制量:被控对象的输入量。由于往往是偏差的某种函数, 因此,也可将偏差看成为控制量。 扰 动 量 ( 干 扰 ): 指 除 给 定 量 以 外 , 所 有 使 得 被 控 制 量 偏 离
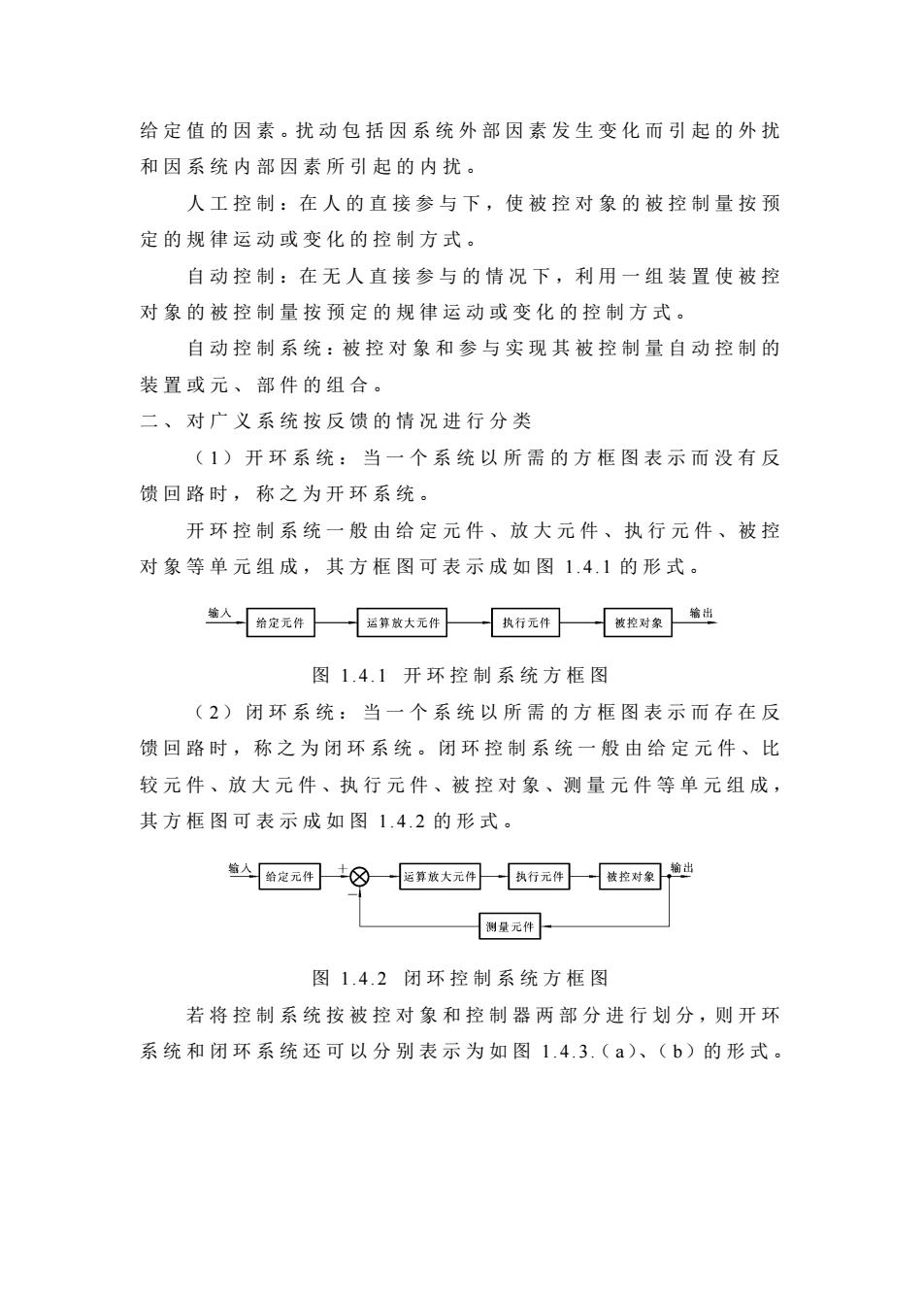
给定值的因素。扰动包括因系统外部因素发生变化而引起的外扰 和因系统内部因素所引起的内扰。 人工控制:在人的直接参与下,使被控对象的被控制量按预 定的规律运动或变化的控制方式。 自动控制:在无人直接参与的情况下,利用一组装置使被控 对象的被控制量按预定的规律运动或变化的控制方式。 自动控制系统:被控对象和参与实现其被控制量自动控制的 装置或元、部件的组合。 二、对广义系统按反馈的情况进行分类 (1)开环系统:当一个系统以所需的方框图表示而没有反 馈回路时,称之为开环系统。 开环控制系统一般由给定元件、放大元件、执行元件、被控 对象等单元组成,其方框图可表示成如图1.4.1的形式。 人一由2无剂一和成大无的一典行无们一黄秋对包靠进 图1.4.1开环控制系统方框图 (2)闭环系统:当一个系统以所需的方框图表示而存在反 馈回路时,称之为闭环系统。闭环控制系统一般由给定元件、比 较元件、放大元件、执行元件、被控对象、测量元件等单元组成 其方框图可表示成如图1.4.2的形式。 省人鱼定元件士⑧一医算成大无们一我行无们一慧控对图触 测显无件 图1.4.2闭环控制系统方框图 若将控制系统按被控对象和控制器两部分进行划分,则开环 系统和闭环系统还可以分别表示为如图1.4.3.(a)、(b)的形式
给定值的因素。扰动包括因系统外部因素发生变化而引起的外扰 和因系统内部因素所引起的内扰。 人工控制:在人的直接参与下,使被控对象的被控制量按预 定的规律运动或变化的控制方式。 自动控制:在无人直接参与的情况下,利用一组装置使被控 对象的被控制量按预定的规律运动或变化的控制方式。 自动控制系统:被控对象和参与实现其被控制量自动控制的 装置或元、部件的组合。 二、对广义系统按反馈的情况进行分类 ( 1)开环系统:当一个系统以所需 的方框图表示而没有反 馈回路时,称之为开环系统。 开环控制系统一般由给定元件、放大元件、执行元件、被 控 对象等单元组成,其方框图可表示成如图 1.4.1 的形式。 图 1.4.1 开环控制系统方框图 ( 2)闭环系统:当一个系统以所需 的方框图表示而存在反 馈回路时,称之为闭环系统。闭环控制系统一般由给定元件、比 较元件、放大元件、执行元件、被控对象、测量元件等单元组成, 其方框图可表示成如图 1.4.2 的形式。 图 1.4.2 闭环控制系统方框图 若将控制系统按被控对象和控制器两部分进行划分,则开环 系统和闭环系统还可以分别表示为如图 1.4.3.( a)、( b)的形式