第五章系统的稳定性 讲授内容 5.1系统稳定的初步概念 一、稳定性的定义 系统稳定性是指系统在干扰作用下偏离平衡位置,当干扰撒 除后,系统自动回到平衡位置的能力。 若系统在初始状态的影响下,由它所引起的系统的时间响应 随着时间的推移,逐渐衰减并趋向于零(即回到平衡位置),则 称系统为稳定的;反之,由它所引起的系统的时间响应随着时间 的推移而发散(即偏离平衡位置越来越远),则称系统为不稳定 的。 线性系统的稳定性是系统的固有特性,仅与系统的结构及参 数有关:而非线性系统的稳定性不仅与系统的结构及参数有关, 而且还与系统的输入有关。 二、系统稳定的充要条件 系统稳定的充要条件是的系统所有特征根的实部全都小于 零,或系统传递函数的所有极点均分布在5平面的左半平面内。 若系统传递函数的所有极点中,只有一个位于虚轴上,而其 它极点均分布在s平面的左半平面内,则系统临界稳定。而临界 稳定的系统极易因为系统的结构或参数的细微变化而变成不稳 定的系统。因此,临界稳定往往也归结为不稳定的一种
第五章 系统的稳定性 讲授内容 5.1 系统稳定的初步概念 一、稳定性的定义 系统稳定性是指系统在干扰作用下偏离平衡位置,当干扰撤 除后,系统自动回到平衡位置的能力。 若系统在初始状态的影响下,由它所引起的系统的时间响应 随着时间的推移,逐渐衰减并趋向于零(即回到平衡位置), 则 称 系 统 为 稳 定 的 ;反 之 ,由 它 所 引 起 的 系 统 的 时 间 响 应 随 着 时 间 的 推 移 而 发 散 ( 即 偏 离 平 衡 位 置 越 来 越 远 ), 则 称 系 统 为 不 稳 定 的 。 线性系统的稳定性是系统的固有特性,仅与系统的结构及参 数有关;而非线性系统的稳定性不仅与系统的结构及参数有关, 而且还与系统的输入有关。 二、系统稳定的充要条件 系统稳定的充要条件是的系统所有特征根的实部全都小于 零,或系统传递函数的所有极点均分布在 s 平面的左半平面内。 若系统传递函数的所有极点中,只有一个位于虚轴上,而其 它极点均分布在 s 平面的左半平面内,则系统临界稳定。而临界 稳定的系统极易因为系统的结构或 参数的细微变化而变成不稳 定的系统。因此,临界稳定往往也归结为不稳定的一种
5.2Rouh(劳斯)稳定判据 Roh判据是判别系统特征根分布的一个代数判据。 一、系统稳定的必要条件 要使系统稳定,即系统全部特征根均具有负实部,就必须满 足以下两个条件: 1)特征方程的各项系数都不等于零。 2)特征方程的各项系数的符号都相同。 此即系统稳定的必要条件。 按习惯,一般取最高阶次项的系数为正,上述两个条件可以 归结为一个必要条件,即系统特征方程的各项系数全大于零,且 不能为零 二、系统稳定的充要条件 系统稳定的充要条件是Rouh表的第一列元素全部大于零,且 不能等于零。 运用Roh判据还可以判定一个不稳定系统所包含的具有正 实部的特征根的个数为Rouh表第一列元素中符号改变的次数。 运用Rouh判据的关键在于建立Roh表。建立Rouh表的方法 请参阅相关的例题或教材。运用Rouh判据判定系统的稳定性, 需要知道系统闭环传递函数或系统的特征方程。 在应用Roh判据还应注意以下两种特殊的情况: 1.如果在Rouh表中任意一行的第一个元素为0,而其后各元不 全为0,则在计算下一行的第一个元时,该元将趋于无穷大。于 是Roh表的计算无法继续。为了克服这一困难,可以用一个很 小的正数s代替第一列等于0的元素,然后计算Roh表的其余各 元。若£上下各元符号不变,切第一列元素符号均为正,则系统 特征根中存在共轭的虚根。此时,系统为临界稳定系统
5.2 Routh(劳斯)稳定判据 Routh 判据是判别系统特征根分布的一个代数判据。 一、系统稳定的必要条件 要使系统稳定, 即系统全部特征根均具有负实部, 就必须满 足以下两个条件: 1)特征方程的各项系数都不等于零。 2)特征方程的各项系数的符号都相同。 此即系统稳定的必要条件。 按习惯, 一般取最高阶次项的系数为正, 上述两个条件可以 归结为一个必要条件,即系统特征方程的各项系数全大于零,且 不能为零。 二、系统稳定的充要条件 系统稳定的充要条件是 表的第一列元素全部大于零,且 不能等于零。 Routh 运 用 判据还可以判定一个不稳定系统所包含的具有正 实部的特征根的个数为 表第一列元素中符号改变的次数。 Routh Routh 运 用 判据的关键在于建立 表。建立 表的方法 请参阅相关的例题或教材。运用 判据判定系统的稳定性, 需要知道系统闭环传递函数或系统的特征方程。 Routh Routh Routh Routh 在应用 Routh 判据还应注意以下两种特殊的情况: 1.如果在 表中任意一行的第一个元素为 0,而其后各元不 全 为 0, 则在计算下一行的第一个元时, 该元将趋于无穷大。 于 是 表的计算无法继续。为了克服这一 困难,可以用一个很 小的正数 Routh Routh ε 代替第一列等于 0 的元素,然后计算 表的其余各 元。若 Routh ε 上下各元符号不变,切第一列元素符号均为正,则系统 特征根中存在共轭的虚根。此时,系统为临界稳定系统
2.如果在Routh表中任意一行的所有元素均为0,Rouh表的计算 无法继续。此时,可以利用该行的上一行的元构成一个辅助多项 式,并用多项式方程的导数的系数组成Roh表的下一行。这样 Roh表中的其余各元就可以计算下去。出现上述情况,一般是 由于系统的特征根中,或存在两个符号相反的实根(系统自由响 应发散,系统不稳定),或存在一对共轭复根(系统自由响应发 散,系统不稳定),或存在一对共轭的纯虚根(即系统自由响应 会维持某一频率的等幅振荡,此时,系统临界稳定),或是以上 几种根的组合等。这些特殊的使系统不稳定或临界稳定的特征根 可以通过求解辅助多项式方程得到。 三、相对稳定性的检验 对于稳定的系统,运用Rouh判据还可以检验系统的相对稳 定性,采用以下方法: 1)将s平面的虚轴向左移动某个数值,即令s=zσ(σ为正实数), 代入系统特征方程,则得到关于z的特征方程。 2)利用Roh判据对新的特征方程进行稳定性判别。如新系统稳 定,则说明原系统特征方程所有的根均在新虚轴之左边,。越大, 系统相对稳定性越好。 5.3 Nyquis1(乃奎斯特)稳定判据 一、辅助函数及其与开环、闭环传递函数零点和极点的关系 如图5.3.1所示的闭环系统,其闭环传递函数为 G(s) G,)=1+G)H() (5.3.1) 开环传递函数为:
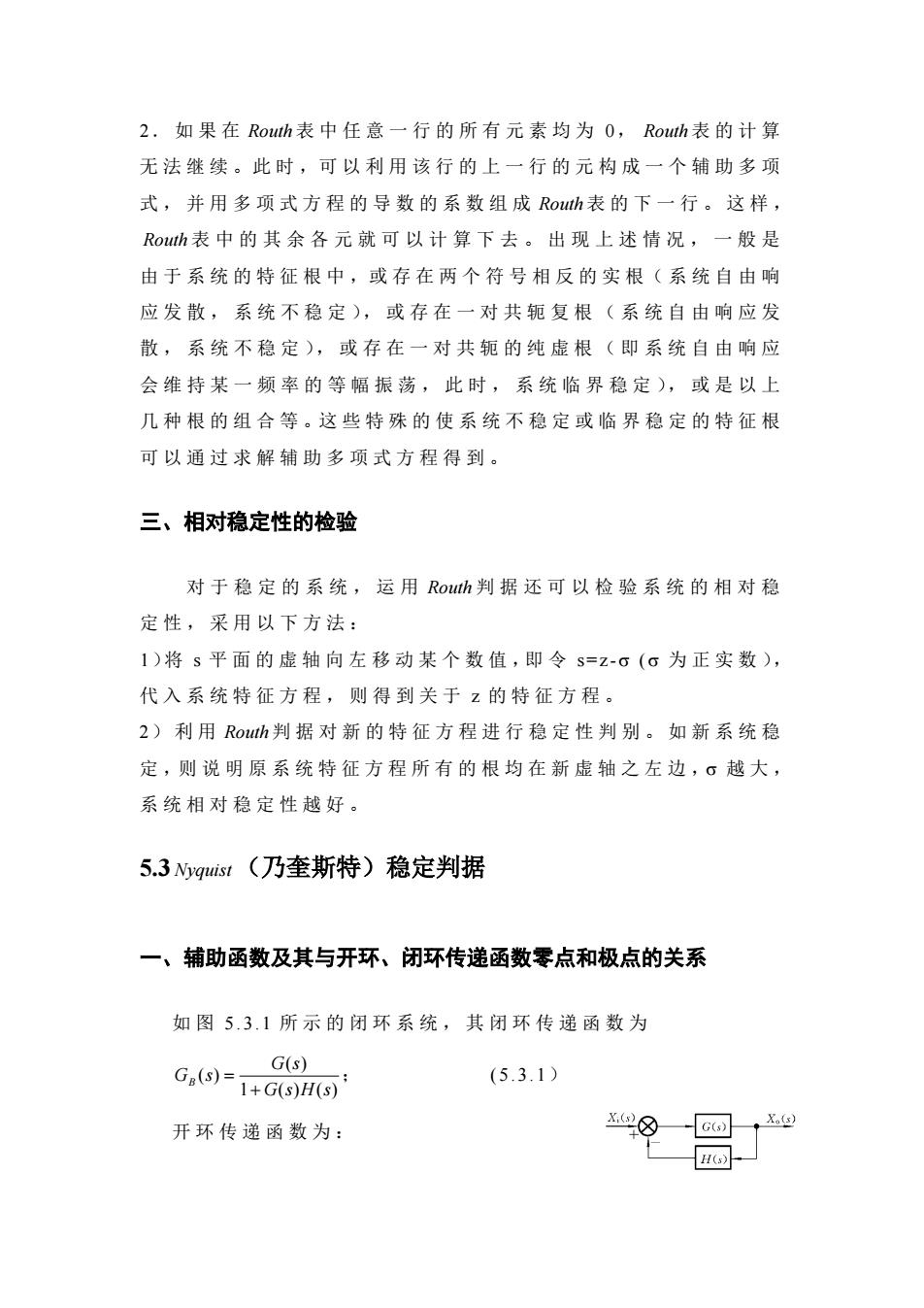
2.如果在 表中任意一行的所有元素均为 0, 表的计算 无法继续。此时,可以利用该行的上一行的元构成一个辅助多项 式 , 并用多项式方程的导数的系数组成 表的下一行。 这样, 表中的其余各元就可以计算下去。出 现上述情况,一般是 由于系统的特征根中,或存在两个符号相反的实根(系统自由响 应发散,系统不稳定),或存在一对共轭复根(系统自由响应发 散,系统不稳定),或存在一对共轭的纯虚根(即系统自由响应 会维持某一频率的等幅振荡,此时,系统临界稳定),或是以上 几种根的组合等。这些特殊的使系统不稳定或临界稳定的特征根 可以通过求解辅助多项式方程得到。 Routh Routh Routh Routh 三、相对稳定性的检验 对于稳定的系统,运用 判据还可以检验系统的相对稳 定性,采用以下方法: Routh 1)将 s 平面的虚轴向左移动某个数值,即 令 s=z-σ (σ 为正实数), 代入系统特征方程,则得到关于 z 的特征方程。 2) 利 用 判据对新的特征方程进行稳定性判别。 如新系统稳 定 ,则说明原系统特征方程所有的根均在新虚轴之左边,σ 越大, 系统相对稳定性越好。 Routh 5.3 Nyquist (乃奎斯特)稳定判据 一、辅助函数及其与开环、闭环传递函数零点和极点的关系 如 图 5.3.1 所示的闭环系统,其闭环传递函数为 1 ( ) ( ) ( ) ( ) G s H s G s G s B + = ; (5.3.1) 开环传递函数为:
Gx(s)=G(s)H(s): 令F(s)=1+Gs)Hs), (5.3.2) 图5.3.1 则G(s)、F(s)、Gx(s)三者的零点和极点之间存在如下关系: F(s)的零点与Ga(s)的极点重合:F(s)的极点与Gx(s)的极点重 合。 因此,系统稳定的充要条件由原来的G(s)的全部极点均位于 s平面的左半平面内,变成为F()的全部零点均位于s平面的左 半平面内,或F(s)在s平面的右半平面内无零点。 二、幅角原理 设F()函数在s平面上(除有限个奇点外)为单值的连续正则 函数。并设s平面上解析点s映射到F(s)平面上为点F(s),或为 原点指向此映射点的向量F(s)。若在s平面上任意选定一封闭曲 线L,只要此曲线不经过F(s)的奇点,就可将s平面上的封闭曲 线L,映射到F(s)平面上去,结果也是一条封闭曲线,记为Le。当 解析点s按顺时针方向沿L变化一周时,向量F(s)将按顺时针方 向旋转N周,即曲线L顺时针包围原点N次。若令:Z为包围于 L,内F(s)函数的零点数:P为包围于L,内F(s)函数的极点数,则存 N=Z-P (5.3.3) 其中,N>0,表示L顺时针包围原点N次: N<0,表示L=逆时针包围原点N次: N=0,表示L不包围原点
G (s) G(s)H(s) K = ; 令 F(s) = 1+ G(s)H(s), ( 5.3.2) 图 5.3.1 则 GB (s)、 F(s)、 GK (s)三者的零点和极点之间存在如下关系: F(s)的零点与 的极点重合; 的极点与 的极点重 合 。 G (s) B F(s) G (s) K 因此,系统稳定的充要条件由原来的 的全部极点均位于 s 平面的左半平面内,变成为 的全部零点均位于 s 平面的左 半平面内,或 在 s 平面的右半平面内无零点。 G (s) B F(s) F(s) 二、幅角原理 设 函数在 s 平面上(除有限个奇点外)为单值的连续正则 函数。并设 s 平面上解析点 s 映射到 平面上为点 ,或为 原点指向此映射点的向量 。若在 s 平面上任意选定一封闭曲 线 ,只要此曲线不经过 的奇点,就可将 s 平面上的封闭曲 线 映射到 平面上去, 结果也是一条封闭曲线, 记 为 。 当 解析点 s 按顺时针方向沿 变化一周时,向量 将按顺时针方 向旋转 周 , 即曲线 顺时针包围原点 次 。 若令: F(s) F(s) F(s) F(s) Ls F(s) Ls F(s) LF Ls F(s) N LF N Z 为包围于 Ls 内 F(s)函数的零点数;P 为包围于 内 函数的极点数,则 存 在 Ls F(s) N = Z − P ( 5.3.3) 其中, N >0,表 示 LF 顺时针包围原点 N 次 ; N <0, 表 示 LF 逆时针包围原点 N 次 ; N =0, 表 示 LF 不包围原点

根据式(5.3.3)有:Z=N+P。其中,N为L顺时针包围原 点的次数:P为F(s)包围于L,的极点数,亦即为G(s)包围于L,的 极点数:Z为包围于L,内的F(s)函数的零点数,亦即为G(s)包围 于L的极点数。 三、s平面封闭曲线的选取 要想判定系统是否稳定,只需合理选择5平面封闭曲线L, 判定该封闭曲线内是否包围F(s)的零点即可。根据系统稳定的条 件,若选取封闭曲线L,使其顺时针包围整个s平面的右半平面, 此时,若Z=0,则系统稳定:反之,系统不稳定。因此,封闭曲 线L,可以这样由以下两段组成:①整个虚轴(即o从-∞变化到 +∞),②以原点为圆心,无穷大为半径的半圆弧。 四、F(s)、Gx(s)轨迹的关系 由式(5.3.2)有:Gx(s)=F(s)-1 即有Gx(s)的轨迹实质上是F(s)轨迹在实轴方向上左移一个 单位得到的。因此,F(s)绕原点旋转的圈数实质上是Gx(s)绕(-l,0) 旋转的圈数。这样一来,可以用Gx(s)的轨迹绕(~L0)旋转的圈数 代替F(s)的轨迹绕原点旋转的圈数N。 五、Gx(s)轨迹 Gx(s)轨迹由两部分组成: 一部分是s沿着整个虚轴移动,即s=j0且0从-0变化到+o
根据式( 5.3.3)有: Z = N + P 。其中, 为 顺时针包围原 点的次数; N LF P 为 包围于 的极点数,亦即为 包围于 的 极点数; F(s) Ls G (s) K Ls Z 为包围于 内 的 函数的零点数,亦即为 包 围 于 的极点数。 Ls F(s) G (s) B Ls 三、s 平面封闭曲线的选取 要想判定系统是否稳定,只需合理选择 s 平面封闭曲线 , 判定该封闭曲线内是否包围 的零点即可。 根据系统稳定的条 件 ,若选取封闭曲线 ,使其顺时针包围整个 s 平面的右半平面, 此时, 若 Ls F(s) Ls Z = 0, 则系统稳定; 反之, 系统不稳定。 因此, 封闭曲 线 Ls 可以这样由以下两段组成:①整个虚轴(即 ω 从 变化到 ),②以原点为圆心,无穷大为半径的半圆弧。 − ∞ + ∞ 四、F(s)、GK (s)轨迹的关系 由式( 5.3.2)有: G (s)= -1 K F(s) 即 有 的轨迹实质上是 轨迹在实轴方向上左移一个 单位得到的。因 此 , 绕原点旋转的圈数实质上是 绕 旋转的圈数。这样一来,可以用 的轨迹绕 G (s) K F(s) F(s) G (s) K (−1, j0) G (s) K (−1, j0)旋转的圈数 代 替 F(s)的轨迹绕原点旋转的圈数 N 。 五、GK (s)轨迹 G (s) K 轨迹由两部分组成: 一部分是 s 沿着整个虚轴移动,即 s = jω 且 ω 从 − ∞变化到 + ∞