第二章系统的数学模型 基本内容 2.0概述 系统按其微分方程是否线性这一特性,可以分为线性系统和 非线性系统。如果系统的运动状态能用线性微分方程表示,则此 系统为线性系统。线性系统的一个最重要的特性就是满足叠加原 理。线性系统又可分为线性定常系统和线性时变系统。 系统的数学模型是系统动态特性的数学描述。对于同一系 统,数学模型可以有多种形式,如微分方程、传递函数、单位脉 冲响应函数及频率特性等等。但系统是否线性这一特性,不会随 模型形式的不同而改变。线性与非线性是系统的固有特性,完全 由系统的结构与参数确定。 系统建模是经典控制理论和现代控制理论的基础。建立系统 数学模型的方法有分析法和实验辨识法两种。前者主要用于对系 统结构及参数的认识都比较清楚的简单系统,而后者通常用于对 系统结构和参数有所了解,而需进一步精化系统模型的情况。对 于复杂系统的建模往往是一个分析法与实验辨识法相结合的多 次反复的过程。在建模的过程中还要正确处理模型简化和模型精 度的辨证关系,以建立简单且能满足要求的数学模型。 2.1系统的微分方程 列写系统或元件微分方程的一般步骤为: (1).确定系统或元件的输入量和输出量: (2).按照信号的传递顺序,从系统的输入端出发,根据有关
第二章 系统的数学模型 基本内容 2.0 概述 系 统 按 其 微 分 方 程 是 否 线 性 这 一 特 性 ,可 以 分 为 线 性 系 统 和 非 线 性 系 统 。如 果 系 统 的 运 动 状 态 能 用 线 性 微 分 方 程 表 示 ,则 此 系 统 为 线 性 系 统 。线 性 系 统 的 一 个 最 重 要 的 特 性 就 是 满 足 叠 加 原 理。线性系统又可分为线性定常系统和线性时变系统。 系统的数学模型是系统动态特性的数学描述。对于同一系 统,数学模型可以有多种形式,如微分方程、传递函数、单位脉 冲 响 应 函 数 及 频 率 特 性 等 等 。但 系 统 是 否 线 性 这 一 特 性 ,不 会 随 模 型 形 式 的 不 同 而 改 变 。线 性 与 非 线 性 是 系 统 的 固 有 特 性 ,完 全 由系统的结构与参数确定。 系 统 建 模 是 经 典 控 制 理 论 和 现 代 控 制 理 论 的 基 础 。建 立 系 统 数 学 模 型 的 方 法 有 分 析 法 和 实 验 辨 识 法 两 种 。前 者 主 要 用 于 对 系 统 结 构 及 参 数 的 认 识 都 比 较 清 楚 的 简 单 系 统 ,而 后 者 通 常 用 于 对 系 统 结 构 和 参 数 有 所 了 解 ,而 需 进 一 步 精 化 系 统 模 型 的 情 况 。对 于复杂系统的建模往往是一个分析 法与实验辨识法相结合的多 次 反 复 的 过 程 。在 建 模 的 过 程 中 还 要 正 确 处 理 模 型 简 化 和 模 型 精 度的辨证关系,以建立简单且能满足要求的数学模型。 2.1 系统的微分方程 列写系统或元件微分方程的一般步骤为: (1).确定系统或元件的输入量和输出量; (2).按照信号的传递顺序,从系统的输入端出发,根据有关

定律,列写出各个环节的动态微分方程: (3).消除上述各方程式中的中间变量,最后得到只包含输入 量与输出量的方程式: (4).将与输入有关的项写在微分方程的右边,与输出有关的 项写在微分方程的左边,并且各阶导数项按降幂排列。 在列写微分方程的各步中,关键在于掌握组成系统的各个元 件或环节所遵循的有关定律。对于机械类的读者,往往需要列写 机械系统和电网络系统的微分方程,因此,有必要掌握如表21.1 所示的常见元件的物理定律。 表2.1.1常见元件的物理定律 系统元件名称 符号 所遵循的物理定律 类别 及代号 质量元件 人 f=m 机械 m 系统 弹性元件 (直 k w面 f=k(x-x) 线运 动) 阻尼元件 f=c(元2-) c 电容 i=C(2-) C 电感 系 L (-)=L 电阻 R i=R,-) 如果系统中包含非本质非线性的元件或环节,为研究系统方
定律,列写出各个环节的动态微分方程; (3).消除上述各方程式中的中间变量,最后得到只包含输入 量与输出量的方程式; (4).将与输入有关的项写在微分方程的右边,与输出有关的 项写在微分方程的左边,并且各阶导数项按降幂排列。 在列写微分方程的各步中,关键在于掌握组成系统的各个元 件或环节所遵循的有关定律。对于机械类的读者,往往需要列写 机械系统和电网络系统的微分方程,因此,有必要掌握如表 2.1.1 所示的常见元件的物理定律。 表 2.1.1 常见元件的物理定律 系 统 类 别 元件名称 及代号 符 号 所遵循的物理定律 质量元件 m f = m& x& 弹性元件 k ( ) 2 1 f = k x − x 机 械 系 统 ( 直 线 运 动 ) 阻尼元件 c ( ) 2 1 f = c x& − x& 电 容 C ( ) 2 1 i = C v& − v& 电 感 L dt di (v2 − v1 ) = L 电 网 络 系 统 电 阻 R ( ) 1 2 1 v v R i = − 如果系统中包含非本质非线性的元件或环节,为研究系统方
便,通常可将其进行线性化。非线性系统线性化的方法是将变量 的非线性函数在系统某一工作点(或称平衡点)附近展开成泰勒 级数,分解成这些变量在该工作点附近的微增量表达式,然后略 去高于一阶增量的项,并将其写成增量坐标表示的微分方程。 2.2系统的传递函数 一、传递函数 对于线性定常系统,传递函数是一种常用的数学模型。其定 义为:在零初始条件下,系统输出的Laplace变换与引起该输出 的输入量的Laplace变换之比。 若线性定常系统输入x,)与输出x,)之间关系的微分方程为 ag)+a。0++ai0+a0=bm0)+b-m-0+.+0+x0)(2.2.1) 则,系统以x,)为输出、x,)为输入的传递函数可表示成: 8格n (2.2.2) 系统的零初始条件有两方面的含义,一是指在1=0.时输入x,) 才开始作用于系统,因此,1=0时,x,)及其各阶导数均为零: 二是指在1=0时系统处于相对静止的状态,即系统在工作点上运 行,因此1=0时,输出x,)及其各阶导数也均为零。现实的工程 控制系统多属此类情况。 传递函数具有以下特点: (1)传递函数的分母反映了由系统的结构与参数所决定的系 统的固有特性,而其分子则反映了系统与外界之间的联系。 (2)当系统在初始状态为零时,对于给定的输入,系统输出 的Laplace变换完全取决于其传递函数。一旦系统的初始状态不 为零,则传递函数不能完全反映系统的动态历程
便 ,通常可将其进行线性化。非线性系统线性化的方法是将变量 的非线性函数在系统某一工作点(或称平衡点)附近展开成泰勒 级数,分解成这些变量在该工作点附近的微增量表达式,然后略 去高于一阶增量的项,并将其写成增量坐标表示的微分方程。 2.2 系统的传递函数 一、传递函数 对于线性定常系统,传递函数是一种 常用的数学模型。其定 义为: 在零初始条件下, 系统输出的 Laplace 变换与引起该输出 的输入量的 Laplace 变换之比。 若线性定常系统输入 xi (t)与输出 o 之间关系的微分方程为 n o n−1 o 1 o 0 o m i m−1 i 1 i 0 i o i x (t) ( ) ( ) . ( ) ( ) ( ) ( ) . ( ) ( ) ( ) ( 1) ( ) ( 1) a x t a x t a x t a x t b x t b x t b x t b x t n n m m + + + + = + + + + − − & & (2.2.1) 则,系统以 x (t)为输出、 x (t)为输入的传递函数可表示成: 1 0 1 1 1 0 1 1 . . ( ) ( ) ( ) a s a s a s a b s b s b s b X s X s G s n n n n m m m m i o + + + + + + + + = = − − − − (n ≥ m) ( 2.2.2) 系统的零初始条件有两方面的含义,一是指在 时输入 才开始作用于系统,因此, 时 , 及其各阶导数均为零; 二是指在 时系统处于相对静止的状态,即系统在工作点上运 行,因此 时,输出 及其各阶导数也均为零。现实的工程 控制系统多属此类情况。 = 0 − t x (t) i = 0 − t x (t) i = 0 − t = 0 − t x (t) o 传递函数具有以下特点: (1)传递函数的分母反映了由系统的 结构与参数所决定的系 统的固有特性,而其分子则反映了系统与外界之间的联系。 (2)当系统在初始状态为零时,对于 给定的输入,系统输出 的 Laplace 变换完全取决于其传递函数。 一旦系统的初始状态不 为零,则传递函数不能完全反映系统的动态历程
(3)传递函数分子中s的阶次不会大于分母中s的阶次。 (4)传递函数有无量纲和取何种量纲,取决于系统输出的量 纲与输入的量纲。 (5)不同用途、不同物理组成的不同类型系统、环节或元件 可以具有相同形式的传递函数。 (6)传递函数非常适用于对单输入、单输出线性定常系统的 动态特性进行描述。但对于多输入、多输出系统,需要对不同的 输入量和输出量分别求传递函数。另外,系统传递函数只表示系 统输入量和输出量的数学关系(描述系统的外部特性),而未表 示系统中间变量之间的关系(描述系统的内部特性)。针对这个 局限性,在现代控制理论中,往往采用状态空间描述法对系统的 动态特性进行描述。 二、传递函数的零点、极点和放大系数 传递函数是一个复变函数,一般具有零点、极点。根据复变 函数知识,凡能使复变函数为0的点均称为零点:凡能使复变函 数为趋于∞的点均称为极点。 若将传递函数写成如下的形式: 6- K为常数 则,s=U=1,2,m)为传递函数的零点,s=p,=12,n)为传递函数 的极点,而将K称为系统的放大系数。传递函数的零点和极点的 分布影响系统的动态性能。一般极点影响系统的稳定性,零点影 响系统的瞬态响应曲线的形状。系统的放大系数决定了系统的稳 态输出值。因此,对系统的研究可变成对系统传递函数的零点、 极点和放大系数的研究。 三、典型环节的传递函数 系统是由若干典型环节组成的。常见典型环节及其传递函数 的一般表达式分别为: 比例环节 G(s)=K
(3)传递函数分子中 s 的阶次不会大于分母中 s 的阶次。 (4)传递函数有无量纲和取何种量纲 ,取决于系统输出的量 纲与输入的量纲。 (5)不同用途、 不同物理组成的不同类型系统、 环节或元件, 可以具有相同形式的传递函数。 (6)传递函数非常适用于对单输入、 单输出线性定常系统的 动态特性进行描述。但对于多输入、多输出系统,需要对不同的 输入量和输出量分别求传递函数。另外,系统传递函数只表示系 统输入量和输出量的数学关系(描述系统的外部特性),而未表 示系统中间变量之间的关系(描述系统的内部特性)。针对这个 局限性,在现代控制理论中,往往采用状态空间描述法对系统的 动态特性进行描述。 二、传递函数的零点、极点和放大系数 传递函数是一个复变函数,一般具有零点、极点。根据复变 函数知识,凡能使复变函数为 0 的点均称为零点;凡能使复变函 数为趋于∞的点均称为极点。 若将传递函数写成如下的形式: K为常数 (s p )(s p ).(s p ) K(s z )(s z ).( s z ) G(s ) n m − − − − − − = 1 2 1 2 则 , s = z j ( j = 1,2,., m)为传递函数的零点, s p ( j 1,2,., n) = j = 为传递函数 的极点, 而 将 K 称为系统的放大系数。 传递函数的零点和极点的 分布影响系统的动态性能。一般极点影响系统的稳定性,零点影 响系统的瞬态响应曲线的形状。系统的放大系数决定了系统的稳 态输出值。因此,对系统的研究可变成对系统传递函数的零点、 极点和放大系数的研究。 三、典型环节的传递函数 系统是由若干典型环节组成的。常见典型环节及其传递函数 的一般表达式分别为: 比例环节 G(s) = K
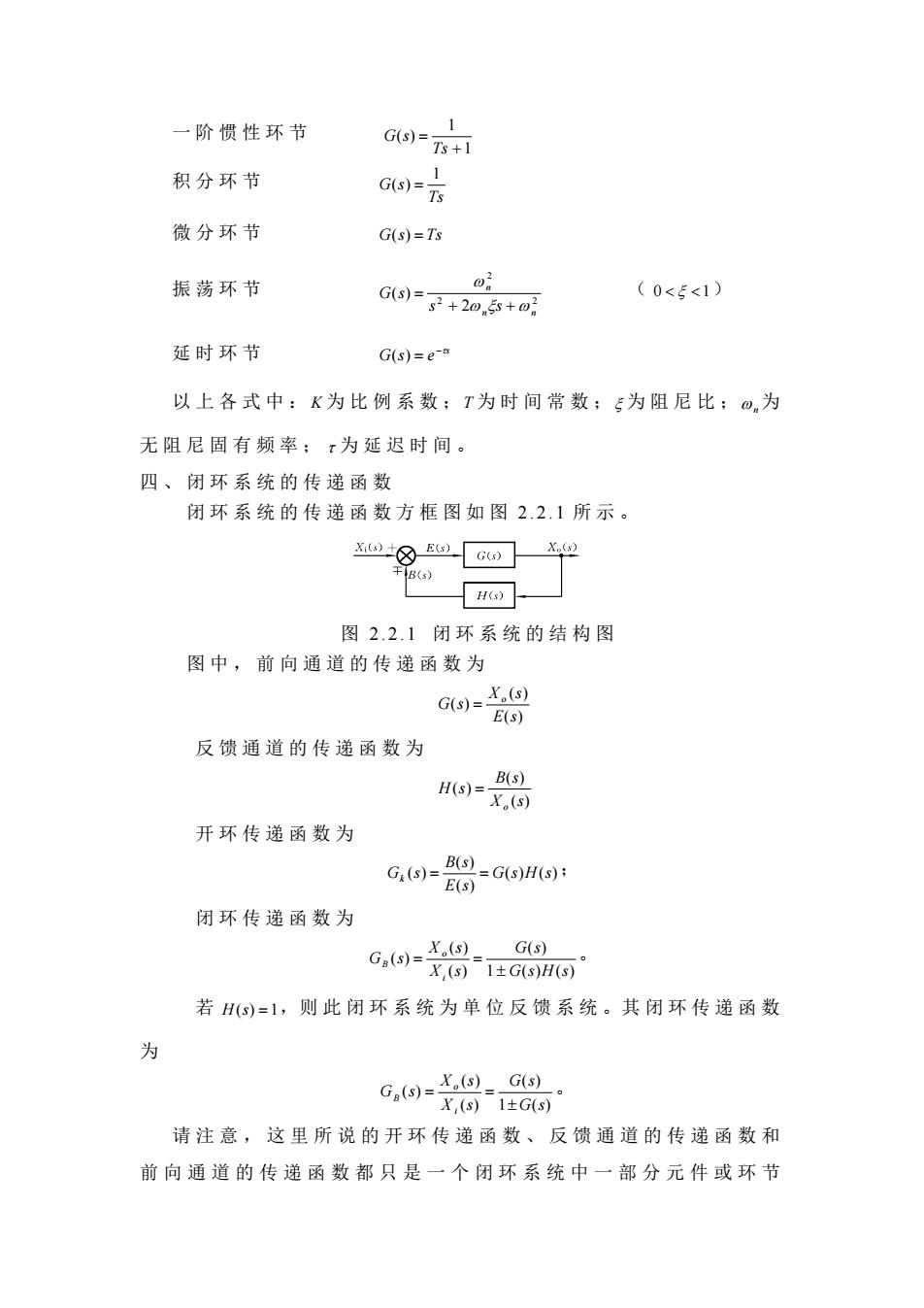
一阶惯性环节 G(s)=Ts+1 1 积分环节 G6)-元 微分环节 G(s)=Ts 振荡环节 02 G()=g+20,5+a (0<E<1) 延时环节 G(s)=e- 以上各式中:K为比例系数:T为时间常数:5为阻尼比:®为 无阻尼固有频率:x为延迟时间。 四、闭环系统的传递函数 闭环系统的传递函数方框图如图2.2.1所示。 0Go X,2 图2.2.1闭环系统的结构图 图中,前向通道的传递函数为 反馈通道的传递函数为 o-器 开环传递函数为 G.()=-G()H(s): E(s) 闭环传递函数为 G(s) G.o=X9-1±GoH可 X(s) 若H()=1,则此闭环系统为单位反馈系统。其闭环传递函数 为 请注意,这里所说的开环传递函数、反馈通道的传递函数和 前向通道的传递函数都只是一个闭环系统中一部分元件或环节
一阶惯性环节 1 1 ( ) + = Ts G s 积分环节 Ts G s 1 ( ) = 微分环节 G(s) = Ts 振荡环节 2 2 2 2 ( ) n n n s s G s ω ξ ω ω + + = ( 0 < ξ <1) 延时环节 s G s e −τ ( ) = 以上各式中: K 为 比 例 系 数 ;T 为时间常数;ξ 为阻尼比;ω n为 无阻尼固有频率; τ 为延迟时间。 四、闭环系统的传递函数 闭环系统的传递函数方框图如图 2.2.1 所示。 图 2.2.1 闭环系统的结构图 图中,前向通道的传递函数为 ( ) ( ) ( ) E s X s G s o = 反馈通道的传递函数为 ( ) ( ) ( ) X s B s H s o = 开环传递函数为 ( ) ( ) ( ) ( ) ( ) G s H s E s B s G s k = = ; 闭环传递函数为 1 ( ) ( ) ( ) ( ) ( ) ( ) G s H s G s X s X s G s i o B ± = = 。 若 ,则此闭环系统为单位反馈系统。其闭环传递函数 为 H (s) =1 1 ( ) ( ) ( ) ( ) ( ) G s G s X s X s G s i o B ± = = 。 请注意,这里所说的开环传递函数、 反馈通道的传递函数和 前向通道的传递函数都只是一个闭 环系统中一部分元件或环节