
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY 选择状态变量x1=iz,x2=u (2)整理得: uL di+Cdtueu RR didi R (1)-(2)得: 4龙=u-跨)日兰 dt'R R dt R 整理得: i- u 4_R+BL血L_业 RR RR dt R2
2 1 2 2 1 ( ) Ru dt di RL dt R di u L Ru i L L c L − = − − − 2 2 R2 u dt du C dt di R L R u L c c = + + 1 2 2 1 2 2 1 R u dt di L R R R R R u R u i L c L − + − = − (2)整理得: (1)-(2)得: 整理得: L c x = i x = u 1 2 选择状态变量
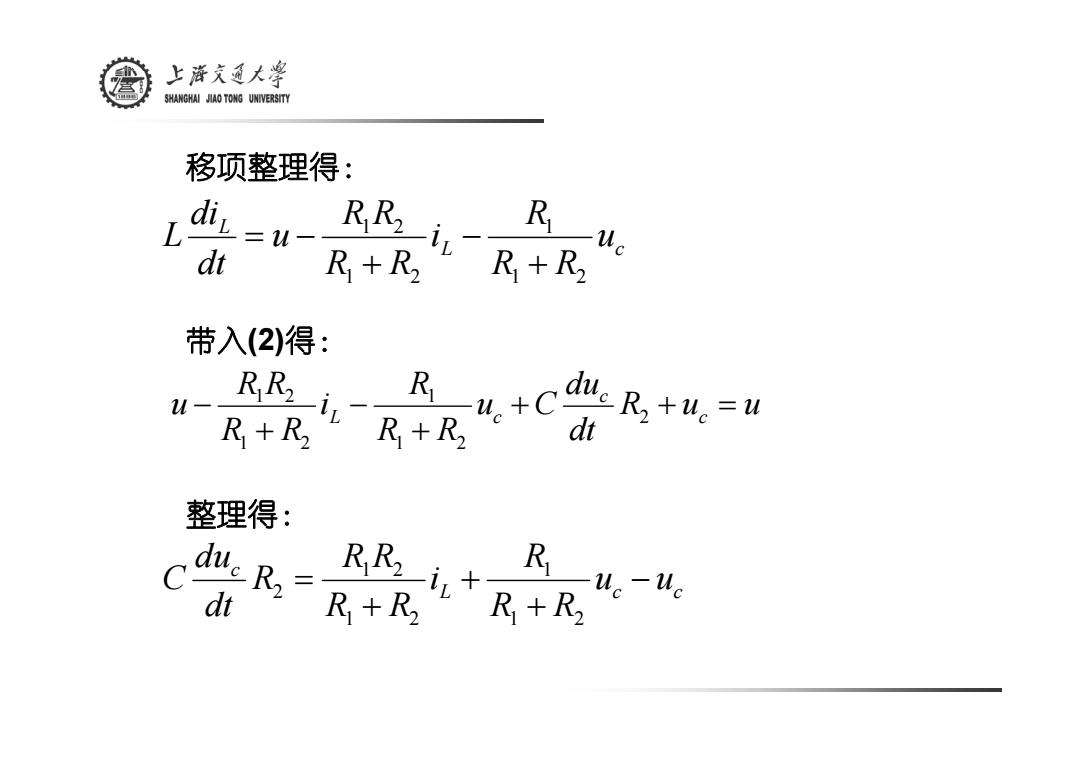
上誉文廷大¥ SHANGHAI JIAO TONG UNIVERSITY 移项整理得: diL=u- L RR2 R一We dt 。R,R+R 带入(2)得: ”2 R。.+CR+u,=u dt 整理得: c告风4之g dt R,一ue-we
R u u dt du u C R R R i R R R R u c c L c + + = + − + − 2 1 2 1 1 2 1 2 L c L u R R R i R R R R u dt di L 1 2 1 1 2 1 2 + − + = − 移项整理得: 带入(2)得: 整理得: L c c c u u R R R i R R R R R dt du C − + + + = 1 2 1 1 2 1 2 2
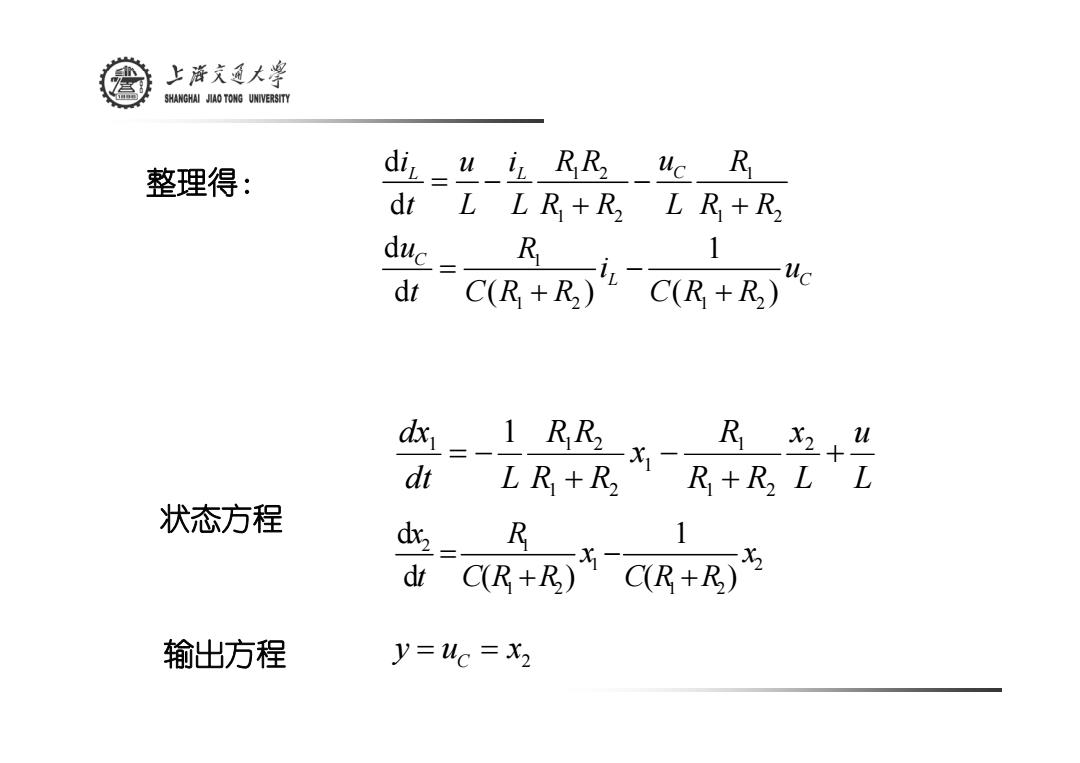
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY 整理得: d=4_立RB,_eB dt L LR+R LR+R R 1 C(R+) C(R +R) C dt R x2u dt 1RB。XR+R1 LR+R 状态方程 R 1 dr CR+R)CR+R) 输出方程 y=uc =X2
整理得: 12 1 12 12 d d L L C i i RR R u u t L LR R L R R =− − + + 1 12 12 d 1 d( )( ) C L C u R i u t CR R CR R = − + + 状态方程 2 1 1 2 12 12 d 1 d( ) ( ) x R x x t CR R CR R = − + + 输出方程 C 2 yu x = = L u L x R R R x R R R R dt L dx + + − + = − 2 1 2 1 1 1 2 1 1 1 2
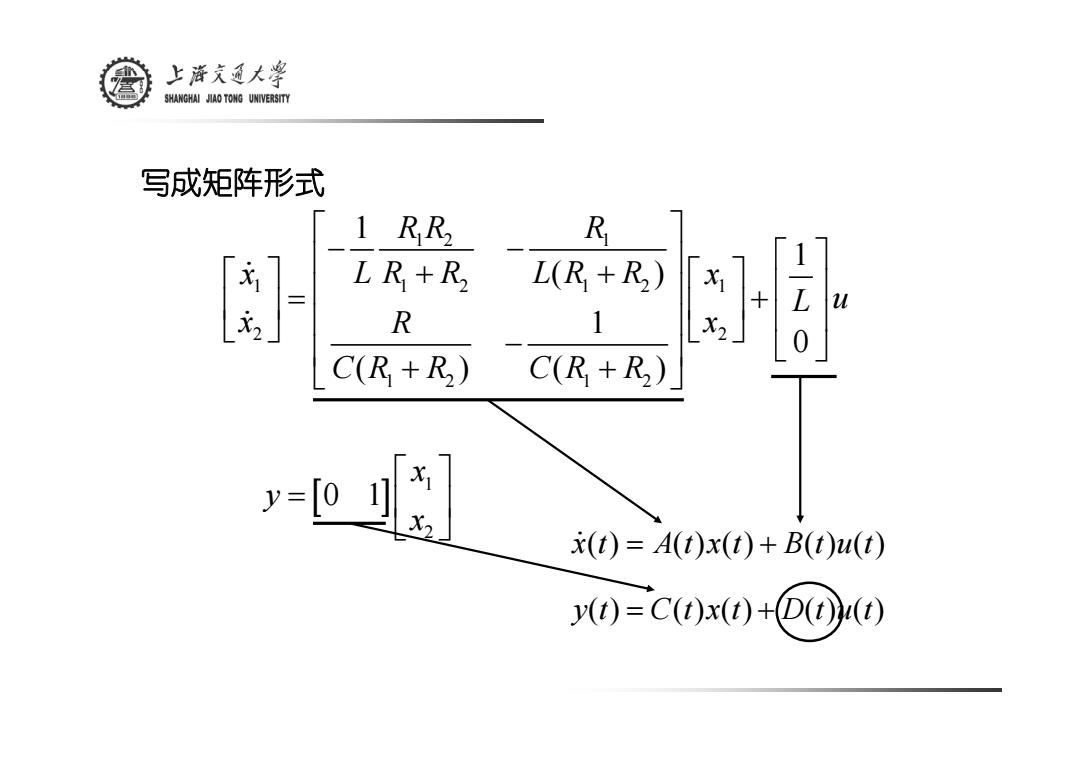
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY 写成矩阵形式 1 RR R LR+R L(R+R2) R 1 X2」 C(R+R2) C(R+R2) x-[ (t)=A(t)x(t)+B(t)u(t) y)=C()x()+D(()
写成矩阵形式 [ ] 12 1 1 1 12 12 2 2 12 12 1 2 1 1 ( ) 1 0 ( )( ) 0 1 RR R x x LR R LR R L u x x R CR R CR R x y x ⎡ ⎤ − − ⎢ ⎥ ⎡ ⎤ ⎡⎤ ⎡⎤ + + ⎢ ⎥ ⎢ ⎥ = + ⎢⎥ ⎢⎥ ⎢ ⎥ ⎢ ⎥ ⎣⎦ ⎣⎦ ⎢ ⎥ − ⎣ ⎦ ⎣ ⎦ + + ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦ & & x &() () () () () t At xt Btut = + y() () () () () t Ctxt Dtut = +
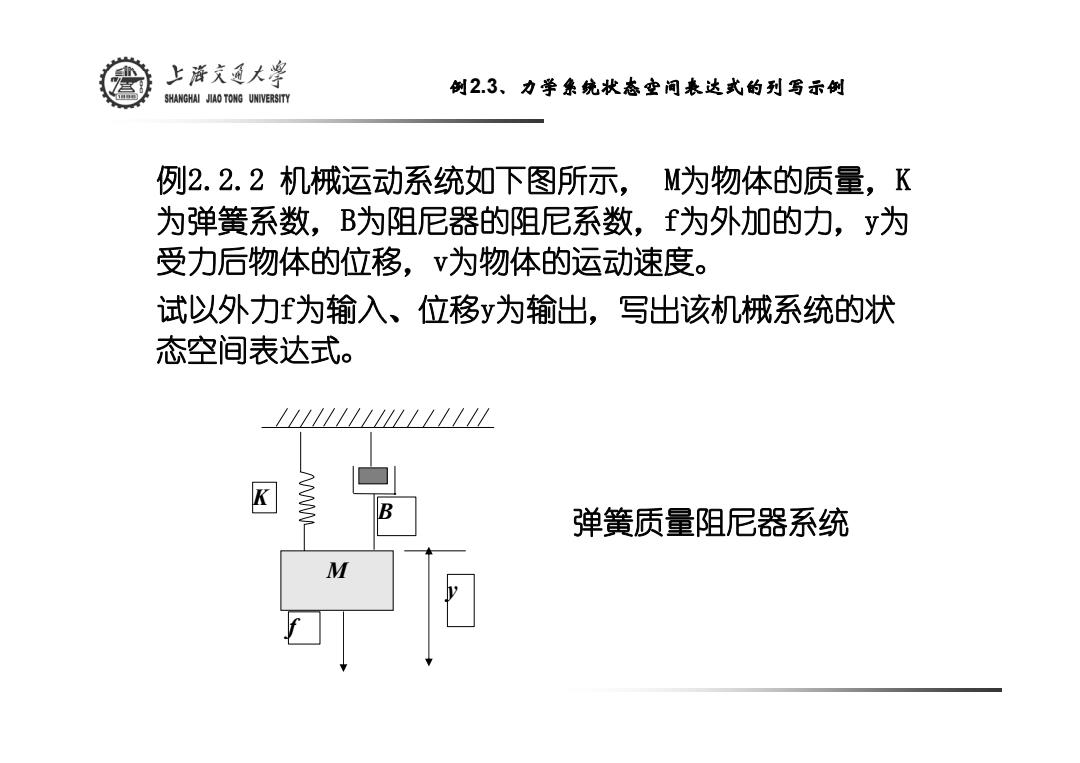
上游文通大¥ 例2.3、力学集统状态空间表达式的列写示例 SHANGHAI JIAO TONG UNIVERSITY 例2.2.2机械运动系统如下图所示,M为物体的质量,K 为弹簧系数,B为阻尼器的阻尼系数,f为外加的力,y为 受力后物体的位移,ⅴ为物体的运动速度。 试以外力f为输入、位移y为输出,写出该机械系统的状 态空间表达式。 K 弹簧质量阻尼器系统 M
例2.3、力学系统状态空间表达式的列写示例 例2.2.2 机械运动系统如下图所示, M为物体的质量,K 为弹簧系数,B为阻尼器的阻尼系数,f为外加的力,y为 受力后物体的位移,v为物体的运动速度。 试以外力f为输入、位移y为输出,写出该机械系统的状 态空间表达式。 K M B y f 弹簧质量阻尼器系统