自动控制原理 第四章 线性系统的根轨迹法 4-1根轨迹法的基本橇念 4-2套制根轨迹的基牵信则 4-3广义根轨迹法 D
自动控制原理 4-1 根轨迹法的基本概念 4-2 绘制根轨迹的基本法则 4-3 广义根轨迹法 第四章 线性系统的根轨迹法
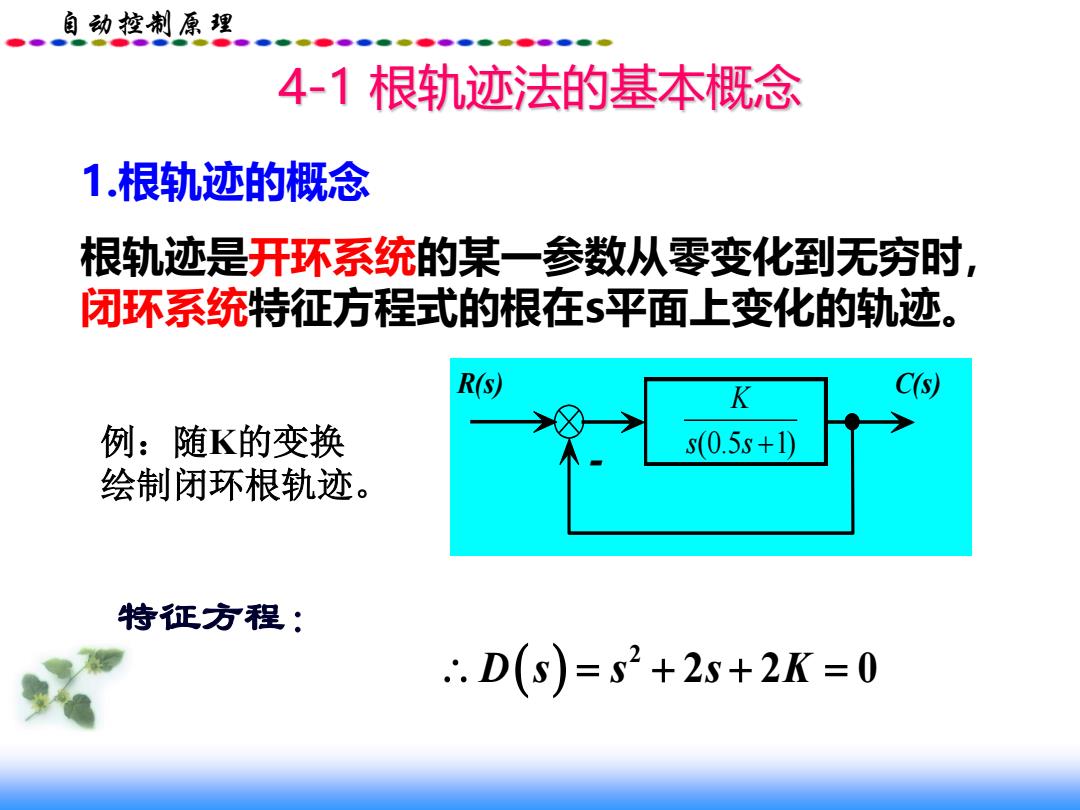
自动控制原理 4-1根轨迹法的基本概念 1.根轨迹的概念 根轨迹是开环系统的某一参数从零变化到无穷时, 闭环系统特征方程式的根在s平面上变化的轨迹。 R(s) K C(s) 例:随K的变换 s(0.5s+1) 绘制闭环根轨迹。 特征方程: .D(s)=s2+2s+2K=0
自动控制原理 4-1 根轨迹法的基本概念 1.根轨迹的概念 根轨迹是开环系统的某一参数从零变化到无穷时, 闭环系统特征方程式的根在s平面上变化的轨迹。 (0.5 1) K s s + R(s) C(s) - 例:随K的变换 绘制闭环根轨迹。 ( ) 2 = + + = D s s s K 2 2 0 特征方程:
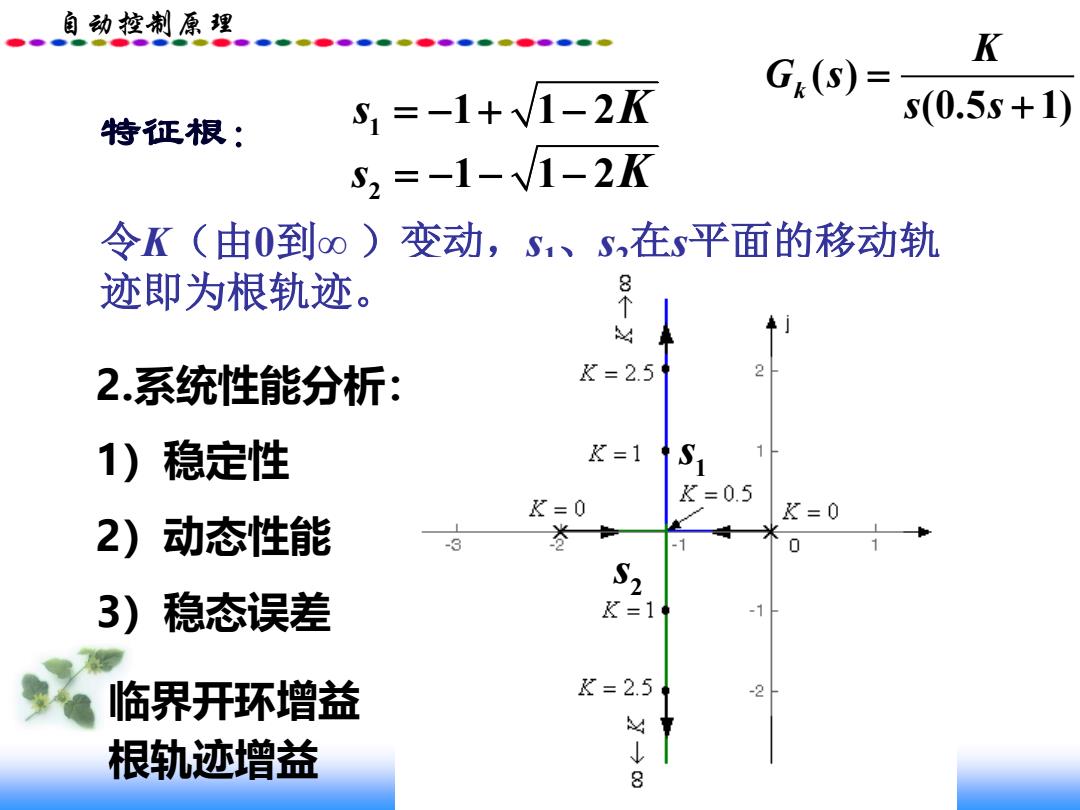
自动控制原理 K G(S)= s(0.5s+1) 特征根: S1=-1+V1-2K S2=-1-W1-2K 令K(由0到o)变动,S、S,在s平面的移动轨 迹即为根轨迹。 8 2系统性能分析: &=2.5 2 1)稳定性 =1S1 =0.5 K=0 K=0 2)动态性能 -3 3)稳态误差 K=1 -1 临界开环增益 K=2.5 根轨迹增益 8
自动控制原理 1 s = − + − 1 1 2K 令K(由0到∞ )变动,s1、s2在s平面的移动轨 迹即为根轨迹。 特征根: 2.系统性能分析: 1)稳定性 2)动态性能 3)稳态误差 临界开环增益 根轨迹增益 2 s = − − − 1 1 2K 1 s 2 s ( ) (0.5 1) k K G s s s = +

自动控制原理 3.闭环零极点与开环零极点间的关系 R(s) C(s) G(s) H(s 设 s-) Πs-2) G(s)=K。 i=1 H(s)=Ki j=1 q s-P) Πs-P) -1 i=
自动控制原理 3.闭环零极点与开环零极点间的关系 R(s) C(s) G(s) H(s) 设 * 1 1 ( ) ( ) ( ) f gi i G q gi i s z G s K s p = = − = − * 1 1 ( ) ( ) ( ) l hj j H x hj j s z H s K s p = = − = −

自动控制原理 则开环传递函数为 1s-n)1s-g) G(S)=K。KH 立s-PeTs-P) i1 则闭环传递函数为 KoII(s-zTI(s-P) Φ(S)= 广s-PΠs-P)+KKns-zs-z)
自动控制原理 则闭环传递函数为 * 1 1 * * 1 1 1 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) f x G gi hj i j q f x l gi hj G H gi hj i j i j K s z s p s s p s p K K s z s z = = = = = = − − = − − + − − 则开环传递函数为 * * 1 1 1 1 ( ) ( ) ( ) ( ) ( ) f l gi hj j i k G H q x gi hj i j s z s z G s K K s p s p = = = = − − = − −