自动控制原理 3-5线性系统稳定性分析 1.稳定性的基本概念 任何系统在扰动作用下都会偏离原平: 偏差。所谓稳定性,是指系统在扰动: 差状态恢复到原平衡状态的能力。 a点为稳定平衡点 d点为不稳定平衡点
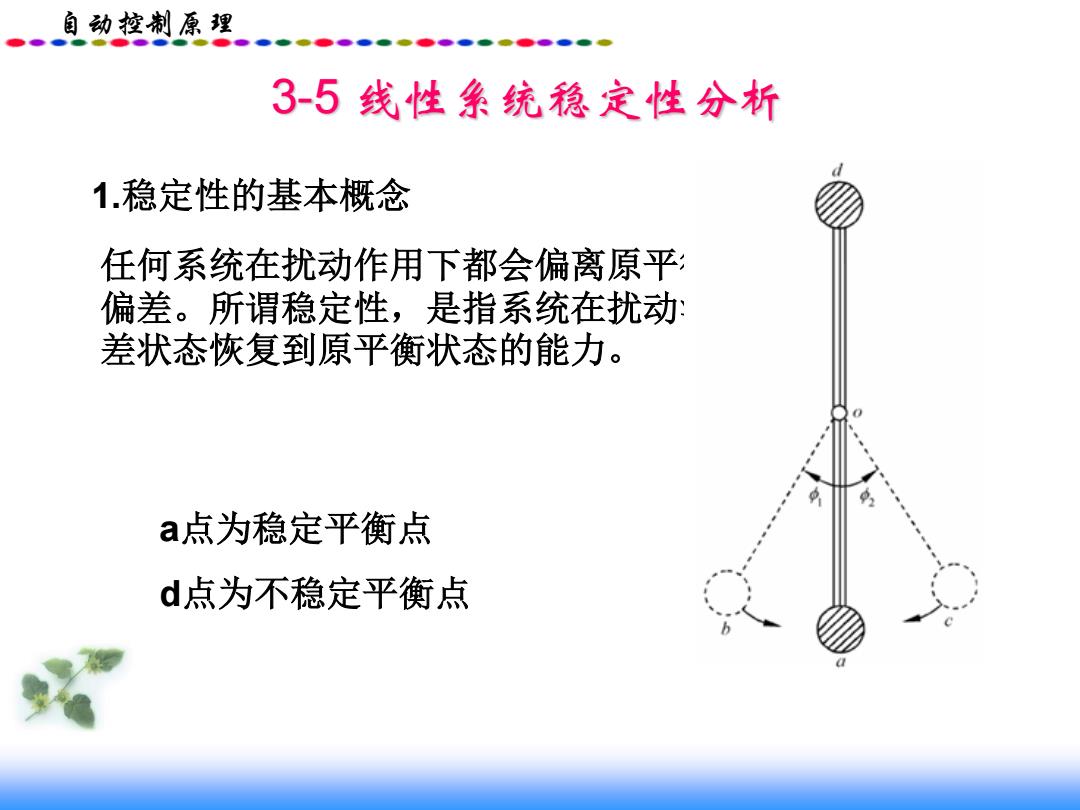
自动控制原理 3-5 线性系统稳定性分析 1.稳定性的基本概念 任何系统在扰动作用下都会偏离原平衡状态,产生初始 偏差。所谓稳定性,是指系统在扰动消失后,由初始偏 差状态恢复到原平衡状态的能力。 a点为稳定平衡点 d点为不稳定平衡点

自动控制原理 大范围稳定的系统: 不论扰动引起的初始偏差有多大,当扰动消失后,系统都 能以足够的准确度恢复到原平衡状态,则称该系统为大范 围稳定的系统。 小范围稳定的系统: 当扰动引起的初始偏差小于某一范围时,扰动消失后,系 统才能恢复到原平衡状态,否则不能恢复到原平衡状态, 则称该系统为小范围稳定的系统。 稳定的线性系统,都是大范围稳定的系统。 非线性系统才存在小范围稳定而大范围不稳定的情 况
自动控制原理 大范围稳定的系统: 不论扰动引起的初始偏差有多大,当扰动消失后,系统都 能以足够的准确度恢复到原平衡状态,则称该系统为大范 围稳定的系统。 小范围稳定的系统: 当扰动引起的初始偏差小于某一范围时,扰动消失后,系 统才能恢复到原平衡状态,否则不能恢复到原平衡状态, 则称该系统为小范围稳定的系统。 稳定的线性系统,都是大范围稳定的系统。 非线性系统才存在小范围稳定而大范围不稳定的情 况

自动控制原理 二、系统稳定的充要条件: 闭环极点严格位于S左半平面。 对线性定常系统,零初始条件下,若其脉冲响应收 敛,则系统稳定,否则不稳定。 bnsm+…+bo C(S)=Φ(S)·1= (s-S,f(s2+25oks+®) i=1 BS+C +s2+25wA5+o2 a0-2e”+2成evio4+g)
自动控制原理 对线性定常系统,零初始条件下,若其脉冲响应收 敛,则系统稳定,否则不稳定。 二、系统稳定的充要条件: 闭环极点严格位于S左半平面。 1 2 1 2 0 2 2 1 1 2 2 1 1 ( ) (s) 1 ( ) ( 2 ) 2 m m n n j k nk nk j k n n j k k j k j k nk nk b s b C s s s s s A B s C s p s s = = = = + + = = − + + + = + − + + 1 2 ' 1 1 ( ) sin( ) j k n n s t t j k dk k j k c t A e B e t − = = = + +
自动控制原理 即单位脉冲响应为: c(0)=之A,e+2B,e'sin(out+A) k=1 系统稳定 222222涂涂次22222涂2次222 lim c(t)=0 t→∞ 综上所述,要判断 一个系统是否稳定,取决于系统 的全部特征根。课本P110下部 线性系统稳定的充要条件:闭环系统特征方程的所 有根均具有负实部:或者说, 闭环传递函数的极点 均位于左半s平面
自动控制原理 lim ( ) 0 t c t → = 即单位脉冲响应为: 系统稳定 1 2 ' 1 1 ( ) sin( ) j k n n s t t j k dk k j k c t A e B e t − = = = + + j s 为负实数 − k 为负实部 综上所述,要判断一个系统是否稳定,取决于系统 的全部特征根。课本P110 下部 线性系统稳定的充要条件:闭环系统特征方程的所 有根均具有负实部;或者说,闭环传递函数的极点 均位于左半s平面
自动控制原理 3.劳思稳定判据 anS”+an-1S"-+…+4S+=0 (1)系统稳定的必要条件是特征方程的所有系数,>0 均大于零。 若不满足系统必定不稳定,若满足系统未必稳定。 (2)列劳思表 线性系统稳定的充要条件是劳思表中第一列所有 项系数均大于零。 第一列中系数符号变化次数为极点在右半平面的 个数
自动控制原理 3.劳思稳定判据 (1)系统稳定的必要条件是特征方程的所有系数ai>0 均大于零。 若不满足系统必定不稳定,若满足系统未必稳定。 (2)列劳思表 线性系统稳定的充要条件是劳思表中第一列所有 项系数均大于零。 第一列中系数符号变化次数为极点在s右半平面的 个数。 1 1 1 0 0 n n n n a s a s a s a − + + + + = −