物理学报Acta Phys.Sim.Vol.60,No.4(2011)048401 感应电能传输系统多谐振点及其 自治振荡稳定性分析 唐春森)叶孙跃)戴欣)王智慧)苏玉刚)呼爱国) 1)(重庆大学自动化学院,重庆400044) 2)(奥克兰大学工程学院,奥克兰1010,新西兰) (2010年9月1日收到:2010年11月10日收到修改稿) 以串联型感应电能传输(PT)系统为例,用非线性动力学的方法研究了PT系统的多谐振点的判断及稳定性 分析问题.建立了系统的频闪映射模型,根据不动点理论推导出了系统的稳态响应分段解析函数式,并在此基础 上,给出了系统谐振工作点的理论判据,结合系统庞加莱映射的雅可比矩阵特征值分布情况,给出了谐振点的稳定 性判据.结合具体实例系统,讨论了其多谐振点现象,并通过仿真和实验进行了验证,证明了本文理论分析结果的 正确性.本文所提出的分析方法也可为其他类似谐振变换电路的建模及稳态工作点分析提供一定的理论参考. 关键词:感应电能传输(PT),频闪映射,雅可比矩阵,稳定性 PACS:84.30.Je,05.45.-a 合特性,其原副边间的耦合系数通常低于甚至远远 1.引 言 低于0.5).为了提高能量转换的效率和功率传输 的能力,系统主电路拓扑通常采用原副边均谐振的 感应电能传输技术(inductive power transfer, 形式,主要有并联谐振、串联谐振以及串并混联谐 PT)是一种借助高频电磁场将电能从电源端耦合 振等[6)].然而开关谐振电路的应用,虽然大大提高 到负载端的电能传输新技术.由于能量发射(原边) 了系统的功率传输能力,却也使得系统数学模型呈 与接收(副边)部分完全绝缘且可以相对移动,使得 现出典型的高阶非线性特性,从而导致系统存在复 电能传输过程具有更加安全、可靠及灵活等优点, 杂的动力学行为,最显著的在于多软开关工作点的 因此该技术在某些特殊领域具有无可比拟的优势. 存在.文献[7]在LCL型谐振电路中发现了多软开 如用其为生物体内植电装置充电或供电,则可以大 关工作点的存在,并研究了参数变化对软开关工作 大降低手术的风险及病人的痛苦1,):用其为有轨 点的影响以及各工作点上的稳态特性。 电车供电,则可以彻底去除传统滑动或者滚动取电 谐振工作点是软开关工作点的一种特殊情况: 存在的电磁污染、不安全及不可靠等缺点):在易 即开关频率与谐振电压及电流的振荡频率一致的 燃易爆环境、潮湿甚至水下环境用电设备的供电方 软开关工作点.PT系统主要有定频和浮频控制策 面,本技术也提供了绿色安全的解决方案4).因此, 略两种常规控制方法].定频模式下,系统开关频 近年来,对该技术的研究已成为电力电子领域的一 率固定,不随参数变化而变化,因此,在负载切换或 个热点. 者参数漂移时,系统很容易进入硬开关工作状态, PT系统的核心环节是电与磁的两次转换,即 引起较大的开关损耗和EML.而浮频模式下,系统开 原边实现由电能到磁能的转换,副边实现磁能到电 关频率跟踪谐振频率,每次开关谐振电压或者电流 能的转换.虽然这与变压器功能类似,但是与变压 过零时切换开关管,可以保证系统总工作在软开关 器的紧密耦合特性不同,PT系统具有典型的松耦 状态,因此浮频模式相对于硬开关模式具有更好的 中央高校基本科研业务费(批准号:CDJZR10170003)资助的课题 E-mail:cstang@cqu.edu.cn c201l中国物理学会Chinese Physical Society http://wulixb.iphy.ac.cn 048401-1
物理学报摇 粤糟贼葬 孕澡赠泽援 杂蚤灶援 摇 灾燥造援 远园袁 晕燥援 源 渊圆园员员冤摇 园源愿源园员 訫圆园员员 中国物理学会 悦澡蚤灶藻泽藻 孕澡赠泽蚤糟葬造 杂燥糟蚤藻贼赠 摇 澡贼贼责院 辕 辕 憎怎造蚤曾遭援 蚤责澡赠援 葬糟援 糟灶 园源愿源园员鄄员 感应电能传输系统多谐振点及其 自治振荡稳定性分析鄢 唐春森员冤覮 孙 跃员冤 戴 欣员冤 王智慧员冤 苏玉刚员冤 呼爱国圆冤 员冤渊重庆大学自动化学院袁重庆摇 源园园园源源冤 圆冤渊奥克兰大学工程学院袁奥克兰摇 员园员园袁新西兰冤 渊圆园员园 年 怨 月 员 日收到曰 圆园员园 年 员员 月 员园 日收到修改稿冤 摇 摇 以串联型感应电能传输渊 陨孕栽冤系统为例袁用非线性动力学的方法研究了 陨孕栽 系统的多谐振点的判断及稳定性 分析问题援 建立了系统的频闪映射模型袁根据不动点理论推导出了系统的稳态响应分段解析函数式袁并在此基础 上袁给出了系统谐振工作点的理论判据袁结合系统庞加莱映射的雅可比矩阵特征值分布情况袁给出了谐振点的稳定 性判据援 结合具体实例系统袁讨论了其多谐振点现象袁并通过仿真和实验进行了验证袁证明了本文理论分析结果的 正确性援 本文所提出的分析方法也可为其他类似谐振变换电路的建模及稳态工作点分析提供一定的理论参考援 关键词院 感应电能传输渊 陨孕栽冤 袁 频闪映射袁 雅可比矩阵袁 稳定性 孕粤悦杂院 愿源援 猿园援 允糟袁 园缘援 源缘援原 葬 鄢中央高校基本科研业务费渊批准号院悦阅允在砸员园员苑园园园猿冤资助的课题援 覮 耘鄄皂葬蚤造院 糟泽贼葬灶早岳 糟择怎援 藻凿怎援 糟灶 员郾 引 言 感应电能传输技术 渊 蚤灶凿怎糟贼蚤增藻 责燥憎藻则 贼则葬灶泽枣藻则袁 陨孕栽冤是一种借助高频电磁场将电能从电源端耦合 到负载端的电能传输新技术援 由于能量发射渊原边冤 与接收渊副边冤部分完全绝缘且可以相对移动袁使得 电能传输过程具有更加安全尧可靠及灵活等优点袁 因此该技术在某些特殊领域具有无可比拟的优势援 如用其为生物体内植电装置充电或供电袁则可以大 大降低手术的风险及病人的痛苦咱员袁 圆暂 曰用其为有轨 电车供电袁则可以彻底去除传统滑动或者滚动取电 存在的电磁污染尧不安全及不可靠等缺点咱猿暂 曰在易 燃易爆环境尧潮湿甚至水下环境用电设备的供电方 面袁本技术也提供了绿色安全的解决方案咱源暂 援 因此袁 近年来袁对该技术的研究已成为电力电子领域的一 个热点援 陨孕栽 系统的核心环节是电与磁的两次转换袁即 原边实现由电能到磁能的转换袁副边实现磁能到电 能的转换援 虽然这与变压器功能类似袁但是与变压 器的紧密耦合特性不同袁陨孕栽 系统具有典型的松耦 合特性袁其原副边间的耦合系数通常低于甚至远远 低于 园郾 缘咱缘暂 援 为了提高能量转换的效率和功率传输 的能力袁系统主电路拓扑通常采用原副边均谐振的 形式袁主要有并联谐振尧串联谐振以及串并混联谐 振等咱远暂 援 然而开关谐振电路的应用袁虽然大大提高 了系统的功率传输能力袁却也使得系统数学模型呈 现出典型的高阶非线性特性袁从而导致系统存在复 杂的动力学行为袁最显著的在于多软开关工作点的 存在援 文献咱苑暂在 蕴悦蕴 型谐振电路中发现了多软开 关工作点的存在袁并研究了参数变化对软开关工作 点的影响以及各工作点上的稳态特性援 谐振工作点是软开关工作点的一种特殊情况袁 即开关频率与谐振电压及电流的振荡频率一致的 软开关工作点援 陨孕栽 系统主要有定频和浮频控制策 略两种常规控制方法咱愿暂 援 定频模式下袁系统开关频 率固定袁不随参数变化而变化袁因此袁在负载切换或 者参数漂移时袁系统很容易进入硬开关工作状态袁 引起较大的开关损耗和 耘酝陨援 而浮频模式下袁系统开 关频率跟踪谐振频率袁每次开关谐振电压或者电流 过零时切换开关管袁可以保证系统总工作在软开关 状态袁因此浮频模式相对于硬开关模式具有更好的
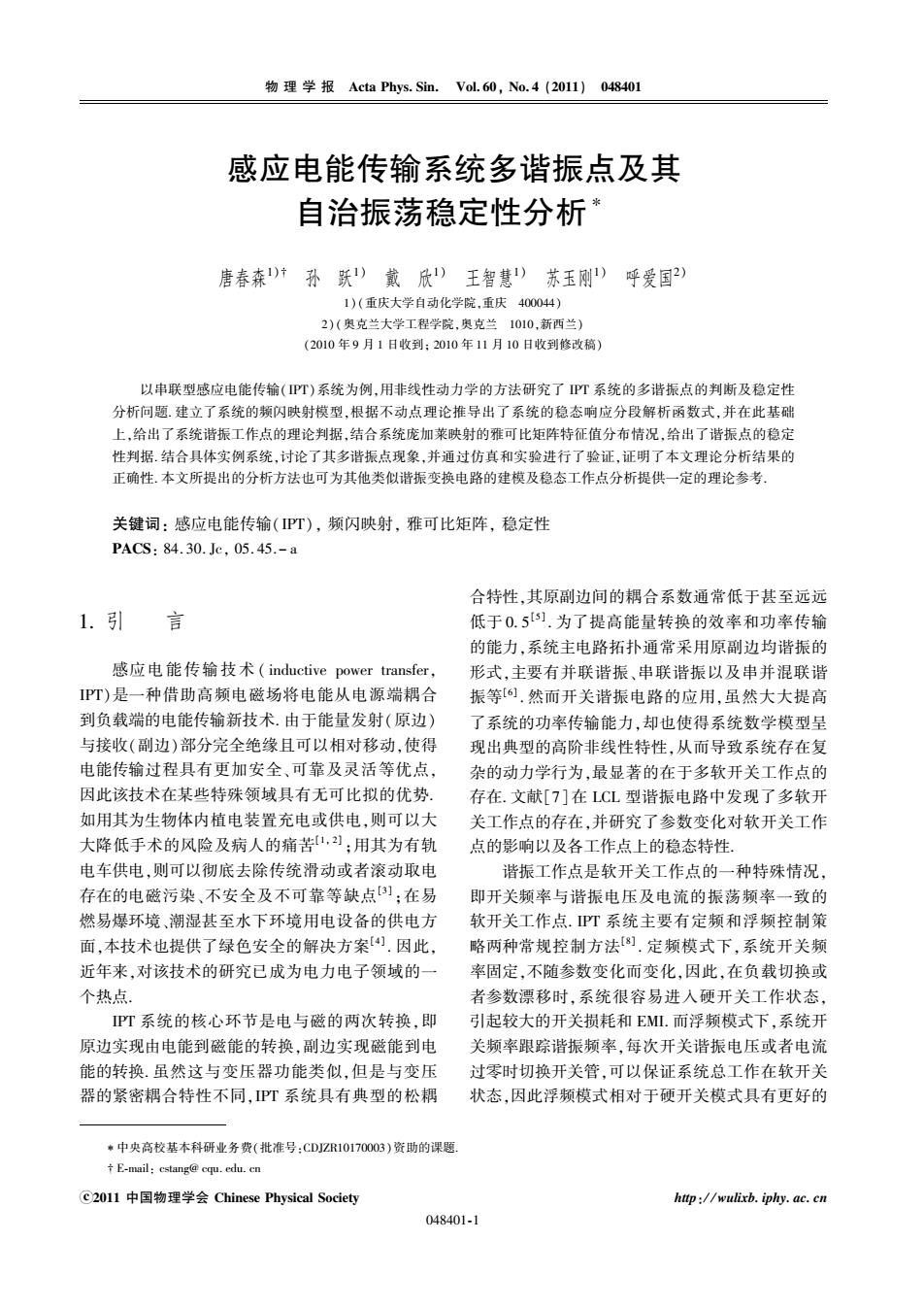
物理学报Acta Phys..Sin.Vol.60,No.4(2011)048401 参数自适应能力.然而由于系统的高阶非线性特 提出一种周期振荡稳态分析方法,给出一种新的谐 性,使得系统存在多软开关工作点的同时,还可能 振点判据,并结合庞加莱映射方法推导出其自治振 存在多谐振工作点,这使得浮频控制模式下的PT 荡稳定性判据.结合实例系统,分析了其谐振点分 系统具有更为复杂的动态过程.文献[9一12]发现 岔现象及各谐振点稳定性,并进行了仿真及实验 在某些情况下,PT系统存在频率跳变的现象.文献 验证 [11一14]基于阻抗分析方法对系统的频率稳定性 问题进行了探讨,但是由于阻抗分析方法的基波近 2.频闪映射模型及系统稳态响应 似特性,使得这种方法的分析精度存在一定的限 制,在分析系统频率分岔行为方面,甚至可能造成 感应电能传输系统实质上是一个可分段线性 错误的结果[)]」 化的高阶开关切换系统,稳态时,系统呈周期振荡 频闪映射及庞加莱映射方法是分析非线性系 状态,各状态变量周期性重复,因此以工作周期为 统的两种典型离散化方法,广泛应用于DC-DC变换 采样时间间隔对系统进行采样,将得到一个稳态不 器的分岔及混沌等非线性行为分析及控制方 动点.据此,本文首先建立系统的频闪映射模型求 面[5-].本文以原副边均串联谐振的感应电能传输 取其周期不动点,再以周期不动点为初值,计算各 系统为研究对象,基于频闪映射方法及不动点理论 状态变量的稳态响应函数, 图1串联谐振型PT系统主电路 图1所示为串联谐振型PT系统的主电路拓 式中 扑,其中开关管S,一S,组成的全桥逆变器将直流电 LR L. M(R.+R) M 源E,变换为高频交变电压加到谐振回路上.实际控 M -LL M -LL M-LL M -LL. 制中,由于开关管开通和关断过程的延迟,使得桥 1 0 0 0 臂存在短路的风险,因此通常要设置一定的死区时 A= 间,以避免引起电源短路.死区时间很小的情况下, MR. M Lp(R,+RL) 逆变器输出电压波形为近似方波,这里为简化分 M -LL.M -LL.M-LL. M -L L 析,将开关管进行了理想化,即开关过程在瞬间完 0 0 0 成,且导通损耗为零 如图1所示的串联谐振型PT系统,根据前面 -M 的理想开关假设,谐振回路的输入电压可以表示为 0 M -LL. e[o.). (2)式的解析解为 uin(t) (1) x(t)=Φ(t)x(0)+ Φ( 1-T)Bu(r)dr,(3) -; 式中Φ(t)=e“ 其中,T为系统稳态开关周期, 半周期内,输入电压是恒定不变的,因此,(3) 分别取系统原副边的谐振电流及谐振电压组 式可以简化为 成系统状态向量,取谐振回路输入电压为系统输入 x(t)=Φ(t)x0+(Φ(t)-I)A-Bu.(4) 向量,即x=[i。,山。,i,4,],u=[u],则根据电路 设x(T)与xn1(T)为第n周期的初始状态及 原理可得系统状态空间模型为 终止状态,则由(4)式可得稳态下系统以周期T为 x=Ax Bu, (2 采样时间间隔的频闪映射模型为 048401-2
物理学报摇 粤糟贼葬 孕澡赠泽援 杂蚤灶援 摇 灾燥造援 远园袁 晕燥援 源 渊圆园员员冤摇 园源愿源园员 园源愿源园员鄄圆 参数自适应能力援 然而由于系统的高阶非线性特 性袁使得系统存在多软开关工作点的同时袁还可能 存在多谐振工作点袁这使得浮频控制模式下的 陨孕栽 系统具有更为复杂的动态过程援 文献咱怨要员圆暂 发现 在某些情况下袁陨孕栽 系统存在频率跳变的现象援 文献 咱员员要员源暂基于阻抗分析方法对系统的频率稳定性 问题进行了探讨袁但是由于阻抗分析方法的基波近 似特性袁使得这种方法的分析精度存在一定的限 制袁在分析系统频率分岔行为方面袁甚至可能造成 错误的结果咱苑暂 援 频闪映射及庞加莱映射方法是分析非线性系 统的两种典型离散化方法袁广泛应用于 阅悦鄄阅悦 变换 器的 分 岔 及 混 沌 等 非 线 性 行 为 分 析 及 控 制 方 面咱员缘要员怨暂 援 本文以原副边均串联谐振的感应电能传输 系统为研究对象袁基于频闪映射方法及不动点理论 提出一种周期振荡稳态分析方法袁给出一种新的谐 振点判据袁并结合庞加莱映射方法推导出其自治振 荡稳定性判据援 结合实例系统袁分析了其谐振点分 岔现象及各谐振点稳定性袁并进行了仿真及实验 验证援 圆郾 频闪映射模型及系统稳态响应 感应电能传输系统实质上是一个可分段线性 化的高阶开关切换系统袁稳态时袁系统呈周期振荡 状态袁各状态变量周期性重复袁因此以工作周期为 采样时间间隔对系统进行采样袁将得到一个稳态不 动点援 据此袁本文首先建立系统的频闪映射模型求 取其周期不动点袁再以周期不动点为初值袁计算各 状态变量的稳态响应函数援 图 员摇 串联谐振型 陨孕栽 系统主电路 摇 摇 图 员 所示为串联谐振型 陨孕栽 系统的主电路拓 扑袁其中开关管 杂员要杂源 组成的全桥逆变器将直流电 源 耘凿糟变换为高频交变电压加到谐振回路上援 实际控 制中袁由于开关管开通和关断过程的延迟袁使得桥 臂存在短路的风险袁因此通常要设置一定的死区时 间袁以避免引起电源短路援 死区时间很小的情况下袁 逆变器输出电压波形为近似方波袁这里为简化分 析袁将开关管进行了理想化袁即开关过程在瞬间完 成袁且导通损耗为零援 如图 员 所示的串联谐振型 陨孕栽 系统袁根据前面 的理想开关假设袁谐振回路的输入电压可以表示为 怎蚤灶 渊贼冤 越 耘凿糟袁 摇 贼 沂 园袁 栽 圆 [ ) 袁 原 耘凿糟袁 摇 贼 沂 栽 圆 [ ) 袁栽 袁 ⎧ ⎩ ⎨ ⎪ ⎪ ⎪ ⎪ 渊员冤 其中袁栽 为系统稳态开关周期援 分别取系统原副边的谐振电流及谐振电压组 成系统状态向量袁取谐振回路输入电压为系统输入 向量袁即 曾 越 咱蚤责 袁怎责 袁蚤泽袁怎泽暂 袁怎 越 咱怎蚤灶 暂 袁 则根据电路 原理可得系统状态空间模型为 曾 越 粤曾 垣 月怎 觶 袁 渊圆冤 式中 粤 越 蕴泽砸责 酝圆 原 蕴责蕴泽 蕴泽 酝圆 原 蕴责蕴泽 酝渊砸泽 垣 砸蕴冤 酝圆 原 蕴责 蕴泽 酝 酝圆 原 蕴责蕴泽 员 悦责 园园园 酝砸责 酝圆 原 蕴责蕴泽 酝 酝圆 原 蕴责蕴泽 蕴责渊砸泽 垣 砸蕴冤 酝圆 原 蕴责 蕴泽 蕴责 酝圆 原 蕴责蕴泽 园 园 员 悦泽 园 ⎡ ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎤ ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ 袁 月 越 原 蕴泽 酝圆 原 蕴责蕴泽 园 原 酝 酝圆 原 蕴责蕴泽 [ ] 园 栽 援 摇 摇 渊圆冤式的解析解为 曾渊贼冤 越 椎渊贼冤曾渊园冤 垣 乙 贼 园 椎渊贼原子冤月怎渊子冤 凿子袁渊猿冤 式中 椎渊贼冤 越 藻粤贼 援 半周期内袁输入电压是恒定不变的袁因此袁渊猿冤 式可以简化为 曾渊贼冤 越 椎渊贼冤曾园 垣 渊椎渊贼冤 原 陨冤粤原员 月怎 援 渊源冤 摇 摇 设 曾灶 渊栽冤 与 曾灶 垣员 渊栽冤 为第 灶 周期的初始状态及 终止状态袁则由渊源冤式可得稳态下系统以周期 栽 为 采样时间间隔的频闪映射模型为

物理学报Acta Phys..Sin.Vol.60,No.4(2011)048401 xa+1(T)=Φ(T)xn(T) x(T)=(1+() +(()-)ABE. (5) x(I()A-BE. (6)】 因为稳态时系统状态必然周期性重复,即 xm+1(T)=x(T),则由(5)式的迭代方程可得状态 以此不动点x·(T)为周期初始值,则稳态周期响 应为 的周期不动点为x”(T)=x(T)=xa+1(T),即 Φ(t)x(T)+(Φ(t)-I)ABEk, te [o.). x(t)= (7) )(n+(w0-2-)+gE,1e子 电流i。每次过零时关闭当前导通的一对开关管并 3.谐振工作点及其稳定性分析 打开另一对互补的开关管,则逆变器的输入电压的 数学模型可以表示为 3.1.谐振工作点及其判断条件 un=Edesgn(in). (9) 在动态过程中,系统各模态的切换取决于状态 在谐振工作点上,系统工作于软开关状态且开 变量。的方向,因此各模态的工作时间是不定的, 关频率和振荡频率一致.为了便于准确判断一个开 设模态1和2的工作时间分别为专和2,则系统模 关频率是否对应于系统的一个谐振工作点,这里在 态切换的边界条件为每次切换时原边谐振电流为 前面得到的系统状态的周期不动点及稳态响应函 零即 数基础上,从系统状态中分离出原边谐振电流分 H(51,xn)=Y·(Φ(5)x。+(Φ(5) 量,根据系统的软开关工作条件及谐振工作点的频 -I)ABEk) 率特征,给出谐振工作点的判断条件如下: =0, (10) (T)=(T)=0, H2(51,52,xn)=Y·(Φ(5+52)x。 i)-(9)=0. +(Φ(5+2) -2Φ(52)+I)ABEk) ,)=)≠01e(0,), (8) =0. (11) 式中Y=[1000]为状态选择矩阵,用于从系 由(10),(11)式可知,模态持续时间,和2均 统状态中分离出原边谐振电流分量 为状态xn的函数 满足(8)式的所有非零解均为系统的谐振周 由(4)式可得系统自治振荡模式下的周期迭代 期,每个谐振周期值对应系统的一个谐振工作点. 模型(庞加莱映射模型)可表示为 然而由于(6),(7)式均为超越方程,因此很难推导 F(xn)=(5+52)x。+(Φ(5+5) 出(8)式的解析解,通常只能借助于计算机进行数 -2Φ(52)+I)A-BE·(12) 值求解。 与(5)式所示的频闪映射模型不同的是,上式 所示模型中模态持续时间专1和52均为状态x。的函 3.2.谐振点自治振荡稳定性分析 数,由(10)和(11)式所示的ZCS软开关边界条件所 前面已经推导出了系统稳态谐振点的判断方 确定在稳态下,因为两个线性模态的持续时间相 法,但是这些导出的稳态谐振点能否在浮频模式下 等,分别为半个稳态周期,则(12)和(5)式形式上完 稳定存在,还需要对其稳定性进行分析.在浮频控 全等价.物理意义上,(5)式是针对固定频率的系统 制模式下,PT系统工作于自治振荡状态,全桥逆变 周期采样模型,对硬开关和软开关运行模式均适 器根据原边谐振电流的方向实时切换,即原边谐振 用,而(12)式为系统软开关运行模式下的周期迭代 048401-3
物理学报摇 粤糟贼葬 孕澡赠泽援 杂蚤灶援 摇 灾燥造援 远园袁 晕燥援 源 渊圆园员员冤摇 园源愿源园员 园源愿源园员鄄猿 曾灶 垣员 渊栽冤 越 椎渊栽冤曾灶 渊栽冤 垣 椎 栽 圆 ( ) ( ) 原 陨 圆 粤原员 月耘凿糟 援 渊缘冤 摇 摇 因为稳态时系统状态必然周期性重复袁 即 曾灶 垣员 渊栽冤 越 曾灶 渊栽冤 袁 则由渊缘冤式的迭代方程可得状态 的周期不动点为 曾鄢渊栽冤 越 曾灶 渊栽冤 越 曾灶 垣员 渊栽冤 袁 即 曾鄢渊栽冤 越 陨垣椎 栽 圆 ( ) ( ) 原员 伊 陨原椎 栽 圆 ( ) ( ) 粤原员 月耘凿糟袁 渊远冤 以此不动点 曾鄢渊栽冤 为周期初始值袁则稳态周期响 应为 詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠 詟 曾渊贼冤 越 椎渊贼冤曾鄢渊栽冤 垣 渊椎渊贼冤 原 陨冤粤原员 月耘凿糟袁 贼 沂 园袁 栽 圆 [ ) 袁 椎渊贼冤曾鄢渊栽冤 垣 椎 贼 ( ) 原 圆椎 贼 原 栽 圆 ( ) ( ) 垣 陨 粤原员 月耘凿糟袁 贼 沂 栽 圆 [ ) 袁栽 援 ⎧ ⎩ ⎨ ⎪ ⎪ ⎪ ⎪ 渊苑冤 詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠詠 詟 詠 猿郾 谐振工作点及其稳定性分析 猿郾 员郾 谐振工作点及其判断条件 在谐振工作点上袁系统工作于软开关状态且开 关频率和振荡频率一致援 为了便于准确判断一个开 关频率是否对应于系统的一个谐振工作点袁这里在 前面得到的系统状态的周期不动点及稳态响应函 数基础上袁从系统状态中分离出原边谐振电流分 量袁根据系统的软开关工作条件及谐振工作点的频 率特征袁给出谐振工作点的判断条件如下院 蚤 鄢 责 渊栽冤 越 再曾鄢渊栽冤 越 园袁 蚤责 渊 栽 圆 冤 越 再曾 栽 圆 ( ) 越 园袁 蚤责 渊贼冤 越 再曾渊贼冤 屹 园袁贼 沂 园袁 栽 圆 ( ) 袁 渊愿冤 式中 再 越 咱员摇 园摇 园摇 园暂 为状态选择矩阵袁用于从系 统状态中分离出原边谐振电流分量援 满足渊愿冤 式的所有非零解均为系统的谐振周 期袁每个谐振周期值对应系统的一个谐振工作点援 然而由于渊远冤袁渊苑冤式均为超越方程袁因此很难推导 出渊愿冤式的解析解袁通常只能借助于计算机进行数 值求解援 猿郾 圆郾 谐振点自治振荡稳定性分析 前面已经推导出了系统稳态谐振点的判断方 法袁但是这些导出的稳态谐振点能否在浮频模式下 稳定存在袁还需要对其稳定性进行分析援 在浮频控 制模式下袁陨孕栽 系统工作于自治振荡状态袁全桥逆变 器根据原边谐振电流的方向实时切换袁即原边谐振 电流 蚤责 每次过零时关闭当前导通的一对开关管并 打开另一对互补的开关管袁则逆变器的输入电压的 数学模型可以表示为 怎蚤灶 越 耘凿糟 泽早灶渊蚤责 冤 援 渊怨冤 摇 摇 在动态过程中袁系统各模态的切换取决于状态 变量 蚤责 的方向袁因此各模态的工作时间是不定的袁 设模态 员 和 圆 的工作时间分别为 孜员 和 孜圆 袁 则系统模 态切换的边界条件为每次切换时原边谐振电流为 零袁即 匀员 渊孜员 袁曾灶 冤 越 再窑渊椎渊孜员 冤曾灶 垣 渊椎渊孜员 冤 原 陨冤粤原员 月耘凿糟冤 越 园袁 渊员园冤 匀圆 渊孜员 袁孜圆 袁曾灶 冤 越 再窑渊椎渊孜员 垣 孜圆 冤曾灶 垣 渊椎渊孜员 垣 孜圆 冤 原 圆椎渊孜圆 冤 垣 陨冤粤原员 月耘凿糟冤 越 园 援 渊员员冤 摇 摇 由渊员园冤 袁渊员员冤式可知袁模态持续时间 孜员 和 孜圆 均 为状态 曾灶 的函数援 由渊源冤式可得系统自治振荡模式下的周期迭代 模型渊庞加莱映射模型冤可表示为 云渊曾灶 冤 越 椎渊孜员 垣 孜圆 冤曾灶 垣 渊椎渊孜员 垣 孜圆 冤 原 圆椎渊孜圆 冤 垣 陨冤粤原员 月耘凿糟 援 渊员圆冤 摇 摇 与渊缘冤式所示的频闪映射模型不同的是袁上式 所示模型中模态持续时间 孜员 和 孜圆 均为状态 曾灶 的函 数袁由渊员园冤和渊员员冤式所示的 在悦杂 软开关边界条件所 确定援 在稳态下袁因为两个线性模态的持续时间相 等袁分别为半个稳态周期袁则渊员圆冤和渊缘冤式形式上完 全等价援 物理意义上袁渊缘冤式是针对固定频率的系统 周期采样模型袁对硬开关和软开关运行模式均适 用袁而渊员圆冤式为系统软开关运行模式下的周期迭代

物理学报Acta Phys..Sin.Vol.60,No.4(2011)048401 模型,满足条件的相轨迹在稳态时正好周期性地穿 根据Floquet定理[2o]可知,如果系统雅可比矩 过软开关边界条件所确定的庞加莱截面.因此,为 阵的所有特征值入均位于单位圆内,即模均小于1, 了判断(8)式所确定的谐振工作点的自治振荡稳定 则对应谐振工作点的自治振荡是渐近稳定的,若有 性,我们可以以周期不动点x·为(12)式所示周期 一个特征值的模大于1,则对应谐振工作点的自治 迭代模型的初始状态,在干扰△x作用下,经历一个 振荡是不稳定的 周期后,观察此干扰的作用是被抑制还是放大,即 是否收敛于初始状态点.这可以通过分析(12)式的 4.多谐振点现象研究 雅可比矩阵特征值的分布情况来实现 定义系统雅可比(Jacobi)算子为 这里将对一个串联谐振型PT系统的多谐振点 D,+( 052 现象进行研究,利用前面的理论分析结果确定该系 13) 统的多个谐振点的工作频率,并分析各工作点的自 由软开关边界条件方程(10)和(11)式,根据隐函数 治振荡稳定性,分析结果通过仿真和实验结果进行 求导法则,可得 了验证, 兰() (14) 4.1.多谐振点现象 对图1所示的串联谐振型PT系统,假设其参 (15) ix, 数取值如表1所示。 (14),(15)式代入(13)式可得系统雅可比矩阵为 表1串联谐振型PT系统参数表 D.F= aFaF (aH aH 参数 取值 ox. a形 a ax. 原边谐振电感L,/μH 85.4 aF aH, aH dH, 原边谐振电容C/μF 0.47 ax, 副边谐振电感L./μH 85.5 副边谐振电容C,/μF 0.48 (16) 原边串联等效阻抗R,/Ω 0.12 式中各偏导项的计算可由(10)一(12)式导出 副边串联等效阻抗R./D 0.12 F=Φ(5+5), 互感M/μH 25.4 o 负载R1/2 1.6 l=Y·(5), 根据(8)式所示谐振工作点判断条件,可以得 i 到系统在表1所示参数下,具有三个谐振工作点,如 =Y·(5+5), ax。 表2所示. 串联谐振型PT系统谐振工作点 aF 表2 店 =Φ(51+专2)(Axn+BE), 谐振工作点 周期值(μs) 颜率值(kHz) aH 谐振点1 34.07 29.35 aE L=Y·(Φ(5)Axn+D(5)BE), 谐振点2 39.73 25.17 谐振点3 44.95 22.25 aH2 a51 =Y·Φ(5:+52)(Axa+BE), 三个谐振工作点对应的逆变器输出电压及原 aF 边谐振电流波形如图2所示。 2 =Φ(51+52)Axn 这三个谐振点上,由(16)式可得系统雅可比矩 +Φ(专2)(Φ(5,)-2I)BE, 阵特征值如表3所示.由表3可以看出,工作点1和 :=Y.[重(5+5)Ax, 3的特征值均分布在单位圆内,为稳定工作点,而工 a52 作点2有一个特征值分布在单位圆外,为不稳定工 +Φ(52)(Φ(5,)-2I)BE]. 作点 048401-4
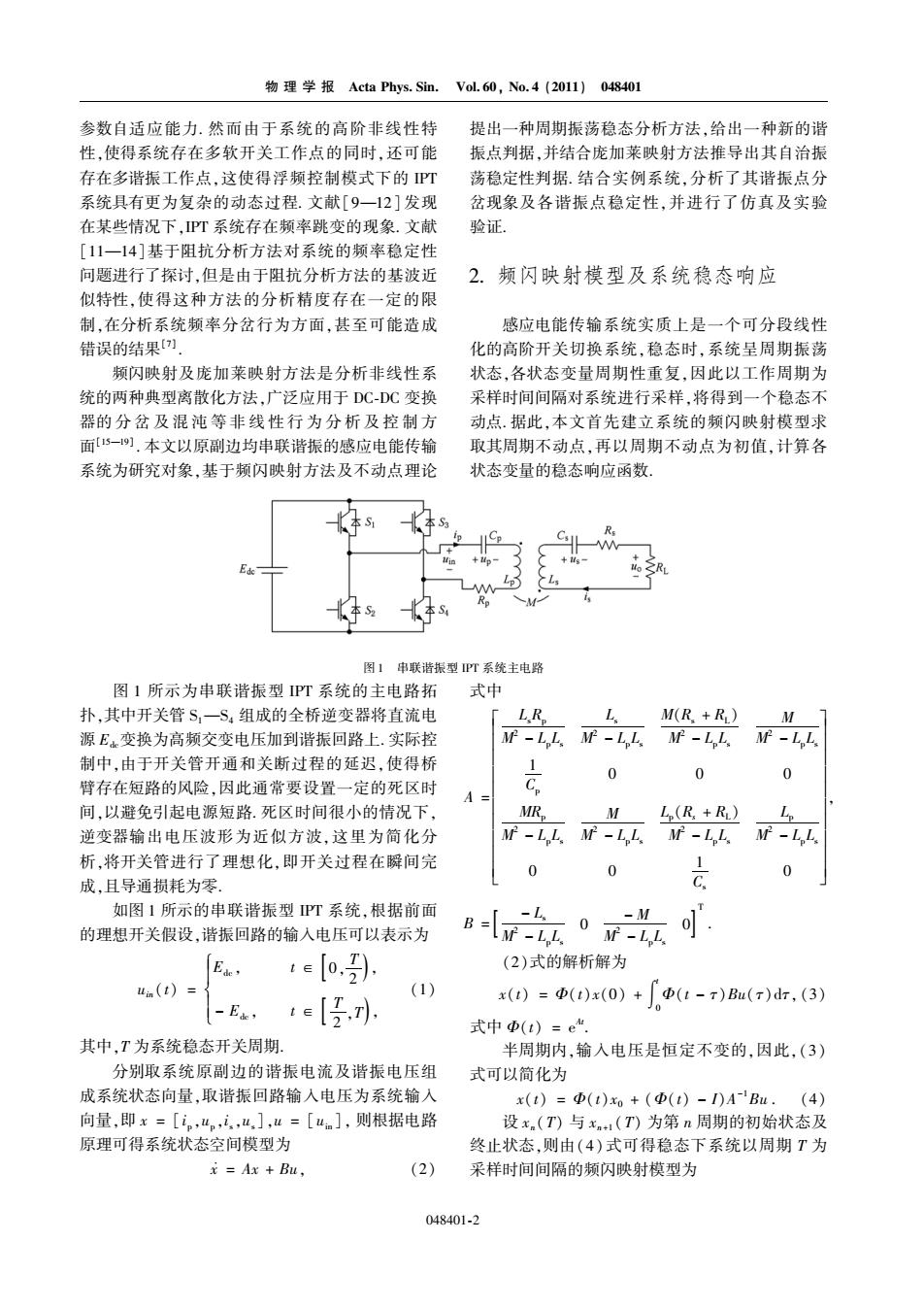
物理学报摇 粤糟贼葬 孕澡赠泽援 杂蚤灶援 摇 灾燥造援 远园袁 晕燥援 源 渊圆园员员冤摇 园源愿源园员 园源愿源园员鄄源 模型袁满足条件的相轨迹在稳态时正好周期性地穿 过软开关边界条件所确定的庞加莱截面援 因此袁为 了判断渊愿冤式所确定的谐振工作点的自治振荡稳定 性袁我们可以以周期不动点 曾鄢 为渊员圆冤 式所示周期 迭代模型的初始状态袁在干扰 驻曾 作用下袁经历一个 周期后袁观察此干扰的作用是被抑制还是放大袁即 是否收敛于初始状态点援 这可以通过分析渊员圆冤式的 雅可比矩阵特征值的分布情况来实现援 定义系统雅可比渊 允葬糟燥遭蚤冤算子为 阅曾灶 云 越 鄣云 鄣曾灶 垣 鄣云 鄣孜员 窑 鄣孜员 鄣曾灶 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟ 垣 鄣云 鄣孜圆 窑 鄣孜圆 鄣曾灶 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟援 渊员猿冤 由软开关边界条件方程渊员园冤和渊员员冤式袁根据隐函数 求导法则袁可得 鄣孜员 鄣曾灶 越 原 鄣匀员 鄣孜员 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟ 原员 窑 鄣匀员 鄣曾灶 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟袁 渊员源冤 鄣孜圆 鄣曾灶 越 原 鄣匀圆 鄣孜圆 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟ 原员 窑 鄣匀圆 鄣曾灶 垣 鄣匀圆 鄣孜员 窑鄣孜员 鄣曾灶 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟援 渊员缘冤 渊员源冤 袁渊员缘冤式代入渊员猿冤式可得系统雅可比矩阵为 阅曾灶 云 越 鄣云 鄣曾灶 原 鄣云 鄣孜员 窑 鄣匀员 鄣孜员 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟ 原员 窑 鄣匀员 鄣曾灶 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟ 原 鄣云 鄣孜圆 窑 鄣匀圆 鄣孜圆 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟ 原员 窑 ⎡ ⎣ ⎢ ⎢ 鄣匀圆 鄣曾灶 原 鄣匀圆 鄣孜员 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟ 伊 鄣匀员 鄣孜员 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟ 原员 窑 鄣匀员 鄣曾灶 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟ ⎤ ⎦ ⎥ ⎥ 袁 渊员远冤 式中各偏导项的计算可由渊员园冤要渊员圆冤式导出 鄣云 鄣曾灶 越 椎渊孜员 垣 孜圆 冤 袁 鄣匀员 鄣曾灶 越 再窑椎渊孜员 冤 袁 鄣匀圆 鄣曾灶 越 再窑椎渊孜员 垣 孜圆 冤 袁 鄣云 鄣孜员 越 椎渊孜员 垣 孜圆 冤 渊粤曾灶 垣 月耘凿糟冤 袁 鄣匀员 鄣孜员 越 再窑渊椎渊孜员 冤粤曾灶 垣 椎渊孜员 冤月耘凿糟冤 袁 鄣匀圆 鄣孜员 越 再窑椎渊孜员 垣 孜圆 冤 渊粤曾灶 垣 月耘凿糟冤 袁 鄣云 鄣孜圆 越 椎渊孜员 垣 孜圆 冤粤曾灶 垣 椎渊孜圆 冤 渊椎渊孜员 冤 原 圆陨冤月耘凿糟袁 鄣匀圆 鄣孜圆 越 再窑咱椎渊孜员 垣 孜圆 冤粤曾灶 垣 椎渊孜圆 冤 渊椎渊孜员 冤 原 圆陨冤月耘凿糟暂援 摇 摇 根据 云造燥择怎藻贼 定理咱圆园暂 可知袁如果系统雅可比矩 阵的所有特征值 姿 均位于单位圆内袁即模均小于 员袁 则对应谐振工作点的自治振荡是渐近稳定的袁若有 一个特征值的模大于 员袁则对应谐振工作点的自治 振荡是不稳定的援 源郾 多谐振点现象研究 这里将对一个串联谐振型 陨孕栽 系统的多谐振点 现象进行研究袁利用前面的理论分析结果确定该系 统的多个谐振点的工作频率袁并分析各工作点的自 治振荡稳定性袁分析结果通过仿真和实验结果进行 了验证援 源郾 员郾 多谐振点现象 对图 员 所示的串联谐振型 陨孕栽 系统袁假设其参 数取值如表 员 所示援 表 员摇 串联谐振型 陨孕栽 系统参数表 参数 取值 原边谐振电感 蕴责 辕 滋匀 愿缘郾 源 原边谐振电容 悦责 辕 滋云 园郾 源苑 副边谐振电感 蕴泽 辕 滋匀 愿缘郾 缘 副边谐振电容 悦泽 辕 滋云 园郾 源愿 原边串联等效阻抗 砸责 辕 赘 园郾 员圆 副边串联等效阻抗 砸泽 辕 赘 园郾 员圆 互感 酝辕 滋匀 圆缘郾 源 负载 砸蕴 辕 赘 员郾 远 根据渊愿冤式所示谐振工作点判断条件袁可以得 到系统在表 员 所示参数下袁具有三个谐振工作点袁如 表 圆 所示援 表 圆摇 串联谐振型 陨孕栽 系统谐振工作点 谐振工作点 周期值渊滋泽冤 频率值渊 噪匀扎冤 谐振点 员 猿源郾 园苑 圆怨郾 猿缘 谐振点 圆 猿怨郾 苑猿 圆缘郾 员苑 谐振点 猿 源源郾 怨缘 圆圆郾 圆缘 三个谐振工作点对应的逆变器输出电压及原 边谐振电流波形如图 圆 所示援 这三个谐振点上袁由渊员远冤式可得系统雅可比矩 阵特征值如表 猿 所示援 由表 猿 可以看出袁工作点 员 和 猿 的特征值均分布在单位圆内袁为稳定工作点袁而工 作点 圆 有一个特征值分布在单位圆外袁为不稳定工 作点援

物理学报Acta Phys.Sim.Vol.60,No.4(2011)048401 10 (a) (b) -10 -1 0.00 0.05 0.10 0.150.20 0.25 0.00 0.05 0.10 0.15 0.20 0.25 1/ms t/ms 0 W 10 00 0.05 0.10 0.15 0.20 0.25 t/ms 图2逆变器输出电压及原边谐振电流稳态理论波形(a)谐振点1:(b)谐振点2:(©)谐振点3 表3系统谐振点雅可比矩阵特征值 特征值 A2 A3 Il mo 谐振点1 0.0218+0.9168i 0.0218-0.9168i 0.7839 0 0.9170 谐振点2 0.4846+0.6606i 0.4846-0.6606i 9.4118 9.4118 谐振点3 -0.4018+0.7619i -0.4018-0.7619i 0.8290 0.8613 将进入硬开关工作模式,因此,PSpice仿真结果说明 4.2.仿真及实验验证 本文方法的计算结果是准确有效的. 4.2.1.多谐振工作点验证 为了对理论结果进行实验验证,我们搭建了以 为了验证前面理论分析结果,在PSpice软件中 图1所示电路为主电路的串联谐振型PT实验系 建立了图1所示系统的仿真模型,以定频模式控制 统,系统主要元器件参数测量值如表1所示.实验 系统分别工作在各理论谐振频率点上,稳态时逆变 中,用信号发生器产生控制信号,该信号经驱动电 器输出电压及原边谐振电流仿真波形分别如图3 路控制全桥逆变器的开关管.通过信号发生器扫 所示. 频,我们得到实验系统的谐振工作点如表4所示.为 由图3可以看出,系统在各理论谐振点上均工 了便于对比分析,表4中同时列出了理论计算结果、 作于ZCS软开关状态,对比图2和图3中各谐振点 交流阻抗分析结果、PSpice仿真验证结果及实验测 的稳态波形,可以看出符合得很好.另外当系统工 试结果 作频率偏离各谐振点时,PSpice仿真结果发现系统 048401-5
物理学报摇 粤糟贼葬 孕澡赠泽援 杂蚤灶援 摇 灾燥造援 远园袁 晕燥援 源 渊圆园员员冤摇 园源愿源园员 园源愿源园员鄄缘 图 圆摇 逆变器输出电压及原边谐振电流稳态理论波形摇 渊葬冤谐振点 员曰渊遭冤谐振点 圆曰渊糟冤谐振点 猿 表 猿摇 系统谐振点雅可比矩阵特征值 特征值 姿员 姿圆 姿猿 姿源 渣 姿 渣 皂葬曾 谐振点 员 园郾 园圆员愿 垣 园郾 怨员远愿蚤 园郾 园圆员愿 原 园郾 怨员远愿蚤 园郾 苑愿猿怨 园 园郾 怨员苑园 谐振点 圆 园郾 源愿源远 垣 园郾 远远园远蚤 园郾 源愿源远 原 园郾 远远园远蚤 怨郾 源员员愿 园 怨郾 源员员愿 谐振点 猿 原 园郾 源园员愿 垣 园郾 苑远员怨蚤 原 园郾 源园员愿 原 园郾 苑远员怨蚤 园郾 愿圆怨园 园 园郾 愿远员猿 源郾 圆郾 仿真及实验验证 源郾 圆郾 员郾 多谐振工作点验证 为了验证前面理论分析结果袁在 孕杂责蚤糟藻 软件中 建立了图 员 所示系统的仿真模型袁以定频模式控制 系统分别工作在各理论谐振频率点上袁稳态时逆变 器输出电压及原边谐振电流仿真波形分别如图 猿 所示援 由图 猿 可以看出袁系统在各理论谐振点上均工 作于 在悦杂 软开关状态袁对比图 圆 和图 猿 中各谐振点 的稳态波形袁可以看出符合得很好援 另外当系统工 作频率偏离各谐振点时袁孕杂责蚤糟藻 仿真结果发现系统 将进入硬开关工作模式袁因此袁孕杂责蚤糟藻 仿真结果说明 本文方法的计算结果是准确有效的援 为了对理论结果进行实验验证袁我们搭建了以 图 员 所示电路为主电路的串联谐振型 陨孕栽 实验系 统袁系统主要元器件参数测量值如表 员 所示援 实验 中袁用信号发生器产生控制信号袁该信号经驱动电 路控制全桥逆变器的开关管援 通过信号发生器扫 频袁我们得到实验系统的谐振工作点如表 源 所示援 为 了便于对比分析袁表 源 中同时列出了理论计算结果尧 交流阻抗分析结果尧孕杂责蚤糟藻 仿真验证结果及实验测 试结果援