《自动控制原理》教学大纲 课程名称(汉):《自动控制原理》 课程名称(英):Automatic Control Theory 课程代码:132013011 课程类型:专业教育平台专业核心课程模块 适用对象:自动化专业本科大二 学时/学分:88学时(理论学时72,实验学时16)/5学分 先修课程:《高等数学》,《复变函数与积分变换》,《模拟电子技术》和《电 路分析基础》等。 方案版本:2021版 一、课程简介 《自动控制原理》课程是一门研究总控制系统的基本概念、基本原理和基本 分析与设计方法的基础工程课程,他是自动化专业的一门专业核心课。本课程主 要内容包括自动控制系统建模、自动控制系统分析和自动控制系统设计(校正)、 离散控制系统等方面。通过本课程的教学,让学生掌握分析与综合SS0自动控 制系统的经典控制理论与方法,并能初步结合实际,分析和设计控制系统。为后 续课程的学习打下坚实基础。 二、课程的教学目标 课程目标1:掌握经典控制论中单输入单输出线性定常控制系统的工作原理;掌 握反馈控制原理的应用以及分析和设计的一般规律,使学生具有分析和设计自动 控制系统的初步能力,对系统的认识上升到更高的层次。 课程目标2:了解控制系统中常用的检测装置,常用执行机构的工作原理,数学 模型的建立过程,以及当前经典控制论的发展状况。 课程目标3:要求在理解有关自动控制系统基本概念的基础上,建立控制系统数 学模型,掌握并灵活运用时域法、根轨迹法和频率法进行系统分析,系统校正的 思路和方法,明确三种方法各自的特点及其内在联系。 课程目标4:理解采样控制系统的基本知识,掌握采样控制系统分析、校正的思 路和方法,为日后计算机控制系统的分析设计打下良好的基础。 课程目标5:通过对非线性系统的学习,认识非线性控制系统运动的特殊性;掌 握运用描述函数法分析非线性系统自振的方法:了解分析非线性系统的相平面 法
《自动控制原理》教学大纲 课程名称(汉):《自动控制原理》 课程名称(英):Automatic Control Theory 课程代码:132013011 课程类型:专业教育平台专业核心课程模块 适用对象:自动化专业本科大二 学时/学分:88 学时(理论学时 72,实验学时 16)/5 学分 先修课程:《高等数学》,《复变函数与积分变换》,《模拟电子技术》和《电 路分析基础》等。 方案版本:2021 版 一、课程简介 《自动控制原理》课程是一门研究总控制系统的基本概念、基本原理和基本 分析与设计方法的基础工程课程,他是自动化专业的一门专业核心课。本课程主 要内容包括自动控制系统建模、自动控制系统分析和自动控制系统设计(校正)、 离散控制系统等方面。通过本课程的教学,让学生掌握分析与综合 SISO 自动控 制系统的经典控制理论与方法,并能初步结合实际,分析和设计控制系统。为后 续课程的学习打下坚实基础。 二、课程的教学目标 课程目标 1:掌握经典控制论中单输入单输出线性定常控制系统的工作原理;掌 握反馈控制原理的应用以及分析和设计的一般规律,使学生具有分析和设计自动 控制系统的初步能力,对系统的认识上升到更高的层次。 课程目标 2:了解控制系统中常用的检测装置,常用执行机构的工作原理,数学 模型的建立过程,以及当前经典控制论的发展状况。 课程目标 3:要求在理解有关自动控制系统基本概念的基础上,建立控制系统数 学模型,掌握并灵活运用时域法、根轨迹法和频率法进行系统分析,系统校正的 思路和方法,明确三种方法各自的特点及其内在联系。 课程目标 4:理解采样控制系统的基本知识,掌握采样控制系统分析、校正的思 路和方法,为日后计算机控制系统的分析设计打下良好的基础。 课程目标 5:通过对非线性系统的学习,认识非线性控制系统运动的特殊性;掌 握运用描述函数法分析非线性系统自振的方法;了解分析非线性系统的相平面 法
三、课程目标对自动化专业毕业要求的支撑关系 毕业要求指标点(非认证专业可以 华业要求 省略本项内容) 课程目标 支撑 权重 工程知识 问题分析 1、2、4、5 设计/开发解决方案 3 0.09 科学研究 0.04 使用现代化工具 工程与社会 环境和可持续发展 职业规范 个人和团队 沟通 项目管理 终身学习 四、教学内容及其基本要求 序号 教学内容 对应课程 教学要求(包括重点难点、教学方法、学生掌握的程度等) 目标 一、教学内容 教学目的与要求 (1)自动控制的基 本章主要介绍自动控制系统的基本概念。 本原理: 要求掌握自动控制的含义、自动控制系统的组 (2)自动控制系统 成、负反馈控制原理、方块图表示方法。理解自动 示例: 控制系统的分类、工程上对自动控制系统的基本要 (3)自动控制系统 求。了解自动控制理论的发展过程及发展趋势。 的分类: (4)自动控制系统 教学重点与难点 1 的分析与设计。 重点:开环控制和闭环控制的基本原理和特 二、实践教学 点,闭环(反馈)控制是本章的重要概念。 软硬件条件:配有 难点:采用实例建立系统的基本概念和由系统 windows操作系统 工作原理图画出系统方块图的方法。 和自动控制实验 教学手段及方式方法 软件的计算机,自 理论讲授为主,课堂组织采用启发式教学方 控原理实验箱。 法,保证学生参与性与师生互动性。对于要求掌握 实验地点:自控原 的知识点,布置一定量的作业,以获得学生掌握情 理实验室 况的反馈信息。对学生掌握比较薄弱的知识点再作
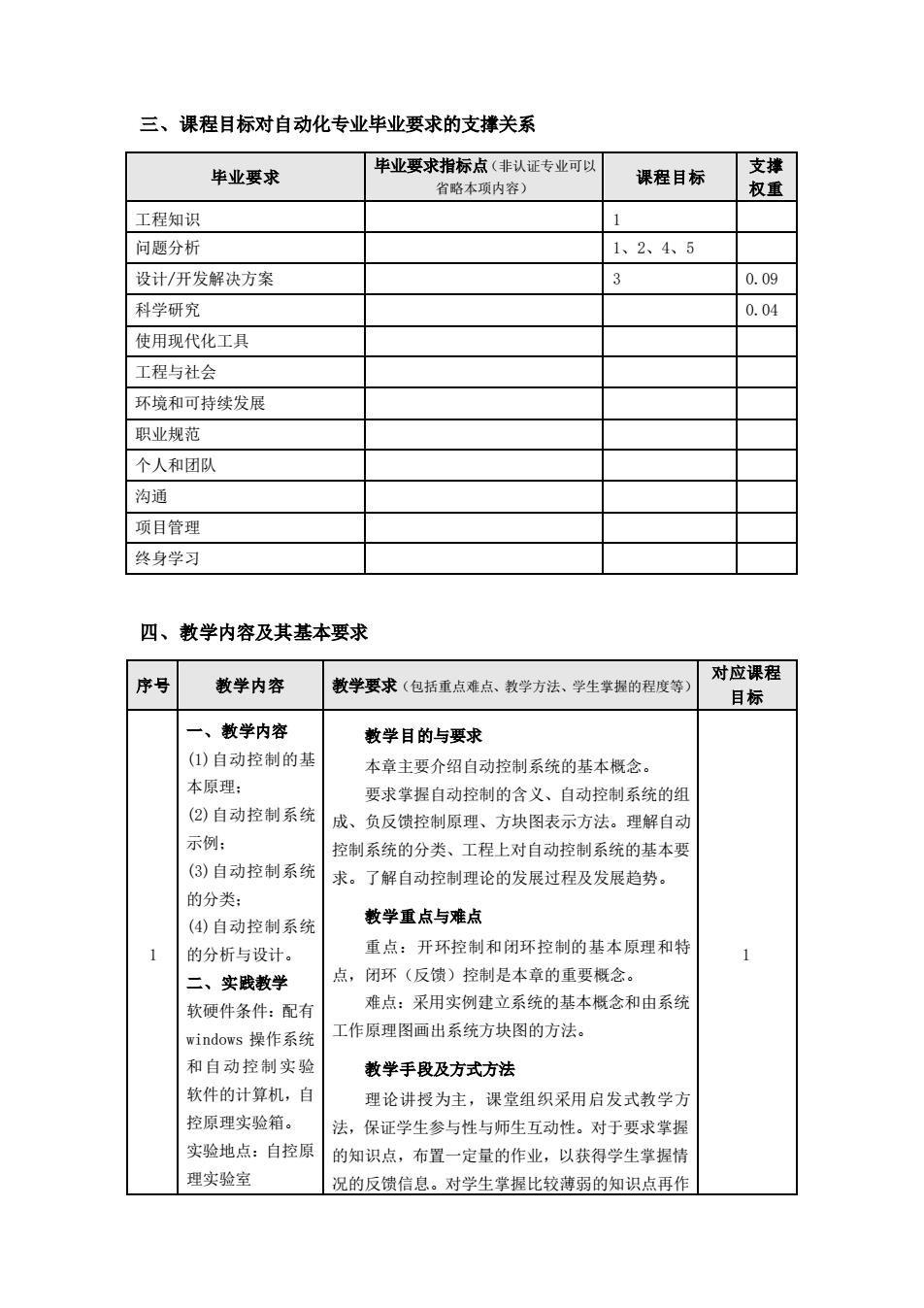
三、课程目标对自动化专业毕业要求的支撑关系 毕业要求 毕业要求指标点(非认证专业可以 省略本项内容) 课程目标 支撑 权重 工程知识 1 问题分析 1、2、4、5 设计/开发解决方案 3 0.09 科学研究 0.04 使用现代化工具 工程与社会 环境和可持续发展 职业规范 个人和团队 沟通 项目管理 终身学习 四、教学内容及其基本要求 序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 对应课程 目标 1 一、教学内容 (1)自动控制的基 本原理; (2)自动控制系统 示例; (3)自动控制系统 的分类; (4)自动控制系统 的分析与设计。 二、实践教学 软硬件条件:配有 windows 操作系统 和自动控制实验 软件的计算机,自 控原理实验箱。 实验地点:自控原 理实验室 教学目的与要求 本章主要介绍自动控制系统的基本概念。 要求掌握自动控制的含义、自动控制系统的组 成、负反馈控制原理、方块图表示方法。理解自动 控制系统的分类、工程上对自动控制系统的基本要 求。了解自动控制理论的发展过程及发展趋势。 教学重点与难点 重点:开环控制和闭环控制的基本原理和特 点,闭环(反馈)控制是本章的重要概念。 难点:采用实例建立系统的基本概念和由系统 工作原理图画出系统方块图的方法。 教学手段及方式方法 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 1
对应课程 序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 目标 巩固。 教学目的与要求 本章主要介绍自动控制系统常用的数学模型 及其求法。 要求牢固掌握传递函数的概念、定义和性质。 熟悉典型环节及其传递函数。熟练地对系统结构图 一、 教学内容 进行等效变换。正确理解并利用梅逊公式求取系统 (1)拉普拉斯变 的传递函数。初步了解脉冲响应函数的概念及性 换 质。 (2)控制系统的 教学重点与难点 时域数学模型 重点:传递函数的基本概念、结构图的建立与 (3)控制系统的 等效变换、梅逊公式。 复数域数学模型 难点:结构图的等效变换:梅逊公式的应用: (4)控制系统的 由系统微分方程建立系统结构图。 结构图与信号流 教学手段及方式方法 图 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 巩固。 一、教学内容 教学目的与要求 (1)系统的时域 本章主要介绍自动控制系统的时域分析法。 性能指标 要求熟练掌握系统稳定的充要条件和判断方 (2)一阶系统的 法。熟练掌握一阶二阶系统动态性能指标与系统参 时域分析 量的关系及计算方法。掌握具有主导极点的高阶系 (3)二阶系统的 统动态性能指标的近似计算方法。掌握系统动态性 时域分析 能随系统闭环极点的移动而变化的规律。正确理解 (4)高阶系统的 稳态误差的概念:牢固掌握计算稳态误差的各种方 3 时域分析 法。了解减小或消除稳态误差的措施。 3 (5)线性系统的 教学重点与难点 稳定性分析 重点:稳定性、稳态误差、一、二阶系统阶跃 (6)线性系统的 响应的特点及动态性能与系统参数间的关系等有 稳态误差计算 关概念和计算方法。 二、实践教学 难点:典型二阶系统的分析:劳斯稳定判据中 典型环节的时域 特殊情况的处理:零、极点位置对系统性能的影响: 响应:典型系统的 提高系统性能的方法。 时域响应和稳定 教学手段及方式方法
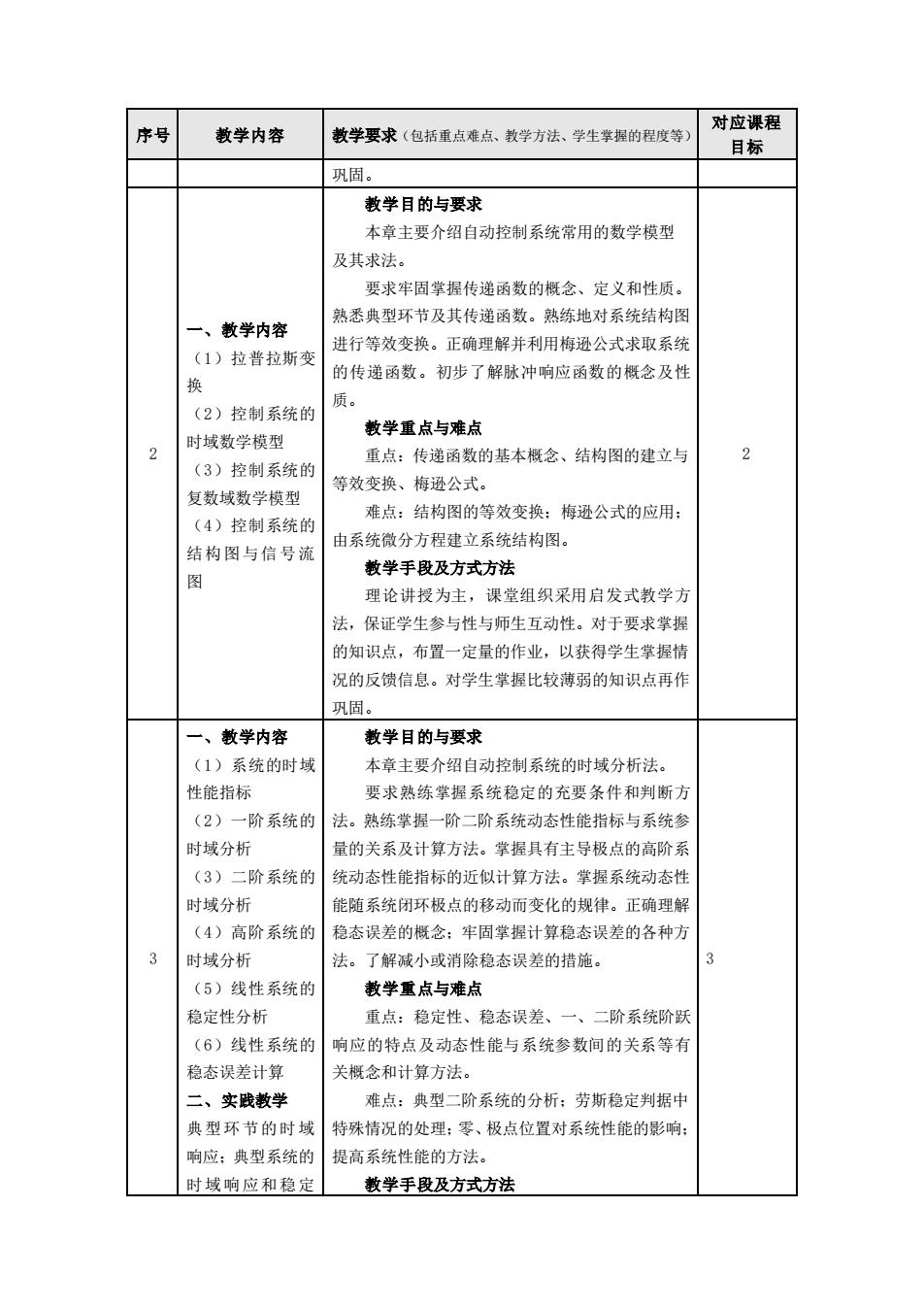
序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 对应课程 目标 巩固。 2 一、教学内容 (1)拉普拉斯变 换 (2)控制系统的 时域数学模型 (3)控制系统的 复数域数学模型 (4)控制系统的 结构图与信号流 图 教学目的与要求 本章主要介绍自动控制系统常用的数学模型 及其求法。 要求牢固掌握传递函数的概念、定义和性质。 熟悉典型环节及其传递函数。熟练地对系统结构图 进行等效变换。正确理解并利用梅逊公式求取系统 的传递函数。初步了解脉冲响应函数的概念及性 质。 教学重点与难点 重点:传递函数的基本概念、结构图的建立与 等效变换、梅逊公式。 难点:结构图的等效变换;梅逊公式的应用; 由系统微分方程建立系统结构图。 教学手段及方式方法 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 巩固。 2 3 一、教学内容 (1)系统的时域 性能指标 (2)一阶系统的 时域分析 (3)二阶系统的 时域分析 (4)高阶系统的 时域分析 (5)线性系统的 稳定性分析 (6)线性系统的 稳态误差计算 二、实践教学 典型环节的时域 响应;典型系统的 时域响应和稳定 教学目的与要求 本章主要介绍自动控制系统的时域分析法。 要求熟练掌握系统稳定的充要条件和判断方 法。熟练掌握一阶二阶系统动态性能指标与系统参 量的关系及计算方法。掌握具有主导极点的高阶系 统动态性能指标的近似计算方法。掌握系统动态性 能随系统闭环极点的移动而变化的规律。正确理解 稳态误差的概念;牢固掌握计算稳态误差的各种方 法。了解减小或消除稳态误差的措施。 教学重点与难点 重点:稳定性、稳态误差、一、二阶系统阶跃 响应的特点及动态性能与系统参数间的关系等有 关概念和计算方法。 难点:典型二阶系统的分析;劳斯稳定判据中 特殊情况的处理;零、极点位置对系统性能的影响; 提高系统性能的方法。 教学手段及方式方法 3
对应课程 序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等 目标 性分析。 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 巩固。 教学目的与要求 本章主要介绍自动控制系统的根轨迹分析法。 要求正确理解根轨迹的概念。掌握根轨迹的绘 教学内容 制法则,能熟练绘制180°根轨迹及参量根轨迹。 (1)根轨迹法的 能用根轨迹分析系统主要性能,掌握主导极点与动 基本概念 态性能指标之间的关系。能定性分析增加开环零极 (2)常规根轨迹 点对系统动静态性能的影响。 的绘制法则 教学重点与难点 (3)广义根轨迹 教学重点:根轨迹的画法,参数根轨迹的画法, 4 (4)系统性能的 并学会用根轨迹的方法来分析控制系统,附加开环 3 分析 零极点对系统根轨迹的改造和对系统性能的影响。 实践教学 教学难点:利用根轨迹对系统性能的分析。 线性系统的根轨 教学手段及方式方法 迹分析。 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 巩固。 教学内容 教学目的与要求 (1)频率特性 本章主要介绍自动控制系统的频域分析法。 (2)典型环节与 要求掌握频率特性的基本概念。熟悉典型环节 开环系统频率特 的频率特性。掌握极坐标图和对数坐标图的绘制方 性 法。掌握Nyquist稳定判据的应用。理解相对稳定 (3)频域稳定判 性的概念,会进行稳定裕度的计算。掌握最小相位 5 据 系统开环频率特性与系统时域指标间的关系。了解 3 (4)频域稳定裕 最小相位系统闭环频率特性与系统时域指标间的 度 关系。 (5)闭环系统的 教学重点与难点 频域性能指标。 教学重点:用频率特性的方法来分析系统的稳 实贱教学 定性,以及相对稳定性以及开环频率特性与控制系 线性系统的频率 统性能指标间的关系
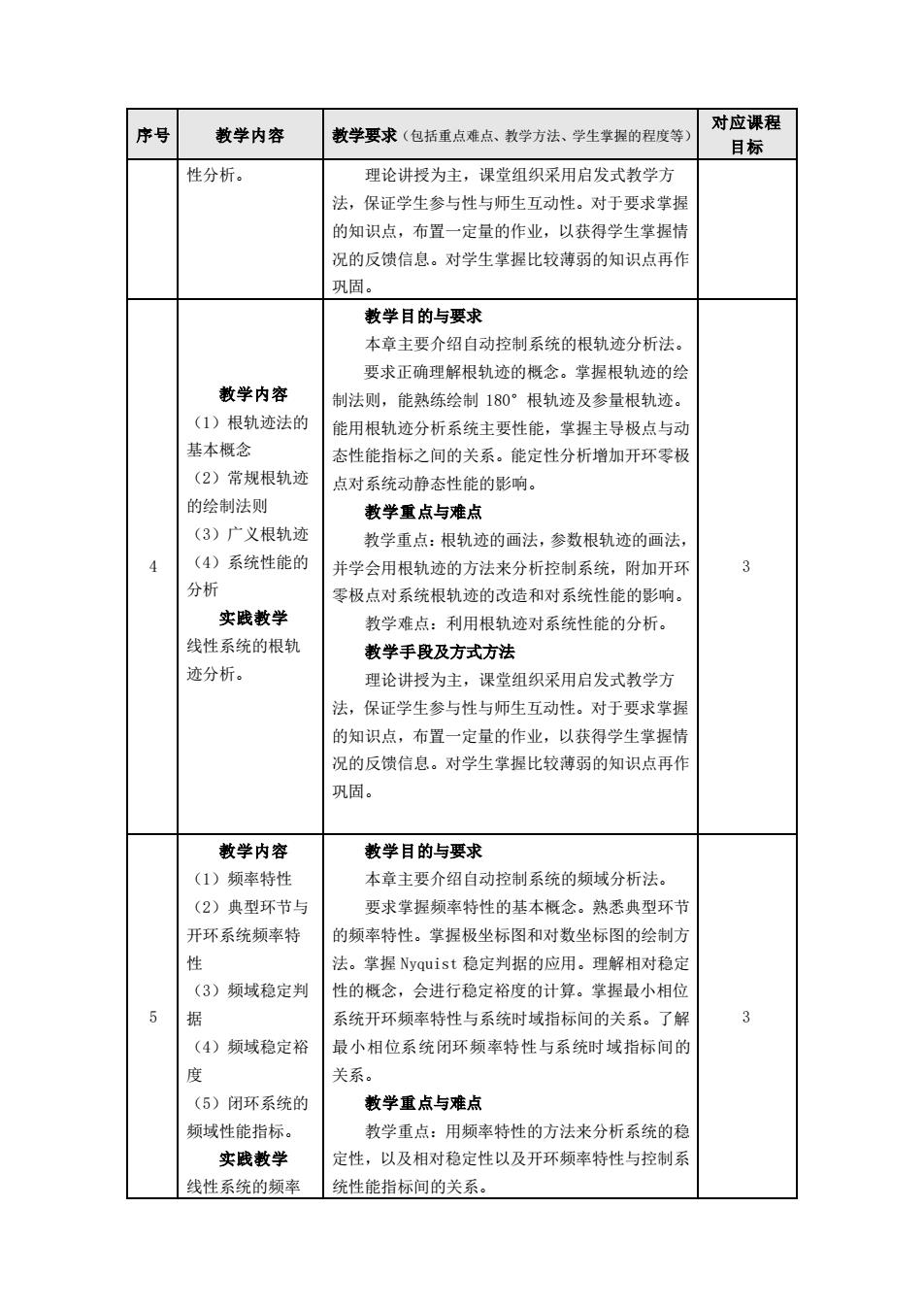
序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 对应课程 目标 性分析。 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 巩固。 4 教学内容 (1)根轨迹法的 基本概念 (2)常规根轨迹 的绘制法则 (3)广义根轨迹 (4)系统性能的 分析 实践教学 线性系统的根轨 迹分析。 教学目的与要求 本章主要介绍自动控制系统的根轨迹分析法。 要求正确理解根轨迹的概念。掌握根轨迹的绘 制法则,能熟练绘制 180°根轨迹及参量根轨迹。 能用根轨迹分析系统主要性能,掌握主导极点与动 态性能指标之间的关系。能定性分析增加开环零极 点对系统动静态性能的影响。 教学重点与难点 教学重点:根轨迹的画法,参数根轨迹的画法, 并学会用根轨迹的方法来分析控制系统,附加开环 零极点对系统根轨迹的改造和对系统性能的影响。 教学难点:利用根轨迹对系统性能的分析。 教学手段及方式方法 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 巩固。 3 5 教学内容 (1)频率特性 (2)典型环节与 开环系统频率特 性 (3)频域稳定判 据 (4)频域稳定裕 度 (5)闭环系统的 频域性能指标。 实践教学 线性系统的频率 教学目的与要求 本章主要介绍自动控制系统的频域分析法。 要求掌握频率特性的基本概念。熟悉典型环节 的频率特性。掌握极坐标图和对数坐标图的绘制方 法。掌握 Nyquist 稳定判据的应用。理解相对稳定 性的概念,会进行稳定裕度的计算。掌握最小相位 系统开环频率特性与系统时域指标间的关系。了解 最小相位系统闭环频率特性与系统时域指标间的 关系。 教学重点与难点 教学重点:用频率特性的方法来分析系统的稳 定性,以及相对稳定性以及开环频率特性与控制系 统性能指标间的关系。 3
对应课程 序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 目标 响应分析 教学难点:用奈氏判据判断系统的稳定性中幅 相曲线包围(-1,j0)点圈数情况,以及负数轴上 (-1,j0)点以左正、负穿越的定义。控制系统的 相对稳定性的含义。幅相曲线变化情况和开环结构 参数关系。 教学手段及方式方法 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 巩固。 教学目的与要求 本章主要介绍自动控制系统的校正。 掌握串联校正中的超前校正的综合过程,滞后 校正的综合过程以及滞后-超前校正的综合过程, 以及按系统的期望频率特性进行校正的综合过程, 采用反馈校正参数的确定。 了解系统为什么需要校正,采用校正方式和方 敦学内容 法的分类。并结合前面第三章、四章、五章对系统 (1)系统的设计 的分析的情况来分析控制系统的基本控制规律。 与校正问题 教学重点与难点 (2)常用校正装 教学重点:超前校正,滞后校正,滞后-超前 置及其特性 6 校正的校正网络传递函数中零极点在S平面上分布 3 (3)串联校正 情况以及参数结构是怎样对校正起作用的,串联校 (4)前馈校正 正和并联校正间的关系。 实践教学 教学难点:采用超前、滞后、滞后-超前校正 线性系统的校正 对系统校正的方法和流程。 教学手段及方式方法 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 巩固。 教学内容 教学目的与要求 (1)离散系统的 本章主要介绍线性离散控制系统的概念和分
序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 对应课程 目标 响应分析 教学难点:用奈氏判据判断系统的稳定性中幅 相曲线包围(-1,j0)点圈数情况,以及负数轴上 (-1,j0)点以左正、负穿越的定义。控制系统的 相对稳定性的含义。幅相曲线变化情况和开环结构 参数关系。 教学手段及方式方法 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 巩固。 6 教学内容 (1)系统的设计 与校正问题 (2)常用校正装 置及其特性 (3)串联校正 (4)前馈校正 实践教学 线性系统的校正 教学目的与要求 本章主要介绍自动控制系统的校正。 掌握串联校正中的超前校正的综合过程,滞后 校正的综合过程以及滞后-超前校正的综合过程, 以及按系统的期望频率特性进行校正的综合过程, 采用反馈校正参数的确定。 了解系统为什么需要校正,采用校正方式和方 法的分类。并结合前面第三章、四章、五章对系统 的分析的情况来分析控制系统的基本控制规律。 教学重点与难点 教学重点:超前校正,滞后校正,滞后-超前 校正的校正网络传递函数中零极点在 S 平面上分布 情况以及参数结构是怎样对校正起作用的,串联校 正和并联校正间的关系。 教学难点:采用超前、滞后、滞后-超前校正 对系统校正的方法和流程。 教学手段及方式方法 理论讲授为主,课堂组织采用启发式教学方 法,保证学生参与性与师生互动性。对于要求掌握 的知识点,布置一定量的作业,以获得学生掌握情 况的反馈信息。对学生掌握比较薄弱的知识点再作 巩固。 3 7 教学内容 (1)离散系统的 教学目的与要求 本章主要介绍线性离散控制系统的概念和分 4