自动控制原理 第七章线性离散系统的分析 7-1离散系统的基本概念 7-2信号的采样与保持 7-3z变换理论 7-4离散系统的数学模型 7-5离散系统的稳定性与稳态误差 7-6离散系统的动态性能分析 AAA 7-7离散系统的数字校正
自动控制原理 第七章 线性离散系统的分析 7-1 离散系统的基本概念 7-2 信号的采样与保持 7-3 z变换理论 7-4 离散系统的数学模型 7-5 离散系统的稳定性与稳态误差 7-6 离散系统的动态性能分析 7-7 离散系统的数字校正
自动控制原理 7-1离散系统的基本概念 ·自动控荆系统按其包含的信号形式通常可划分成一下几种类 型: 一连续控制系统:连续信号 一离控制系统:有一处或几处为离散信号(脉冲或数码) ·采样控制系统或脉冲控制系统: 一离散信号是脉冲序列形式 ·数字控制系统或计算机控制系统: 一离嫩信号是数字序列形式
自动控制原理 7-1 离散系统的基本概念 • 自动控制系统按其包含的信号形式通常可划分成一下几种类 型: – 连续控制系统:连续信号 – 离散控制系统:有一处或几处为离散信号(脉冲或数码) • 采样控制系统或脉冲控制系统: – 离散信号是脉冲序列形式 • 数字控制系统或计算机控制系统: – 离散信号是数字序列形式
自动控制原理 5 4 模拟量 2 1 0 123456789 采 样 5 4.5 4.1- 4 33.2 离散量 3 脉冲序列 1 0123456789 量 化 t 5 5 4 数字量 32 数字序列 89
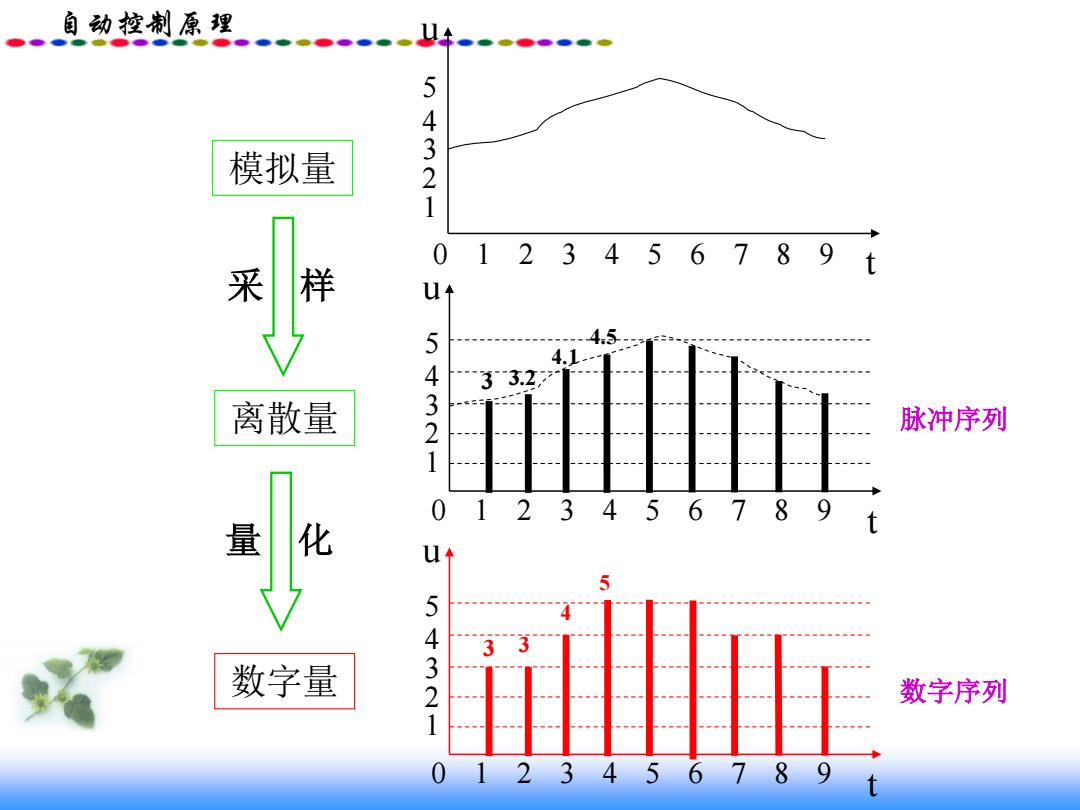
自动控制原理 t u 0123456789 5 4 3 2 1 模拟量 t 0123456789 u 5 4 3 2 1 离散量 数字量 3 3.2 4.1 4.5 t 0123456789 u 5 4 3 2 1 3 3 4 5 采 样 量 化 脉冲序列 数字序列
自动控制原理 1.采样控制系统 离散信号是脉冲序列 (时间上离散) 给定 由位器 0 加热气体 车 被控对象 每隔时间T凸轮使指针 接触电位器一次,每 次接触时间为τ。则T 检流器 凸轮 电动机 为采样周期,τ为采样 减速器 执行器 持续时间。 测量变换 电位器 图7-1炉温采样 放大器 控制系统原理图 控制器
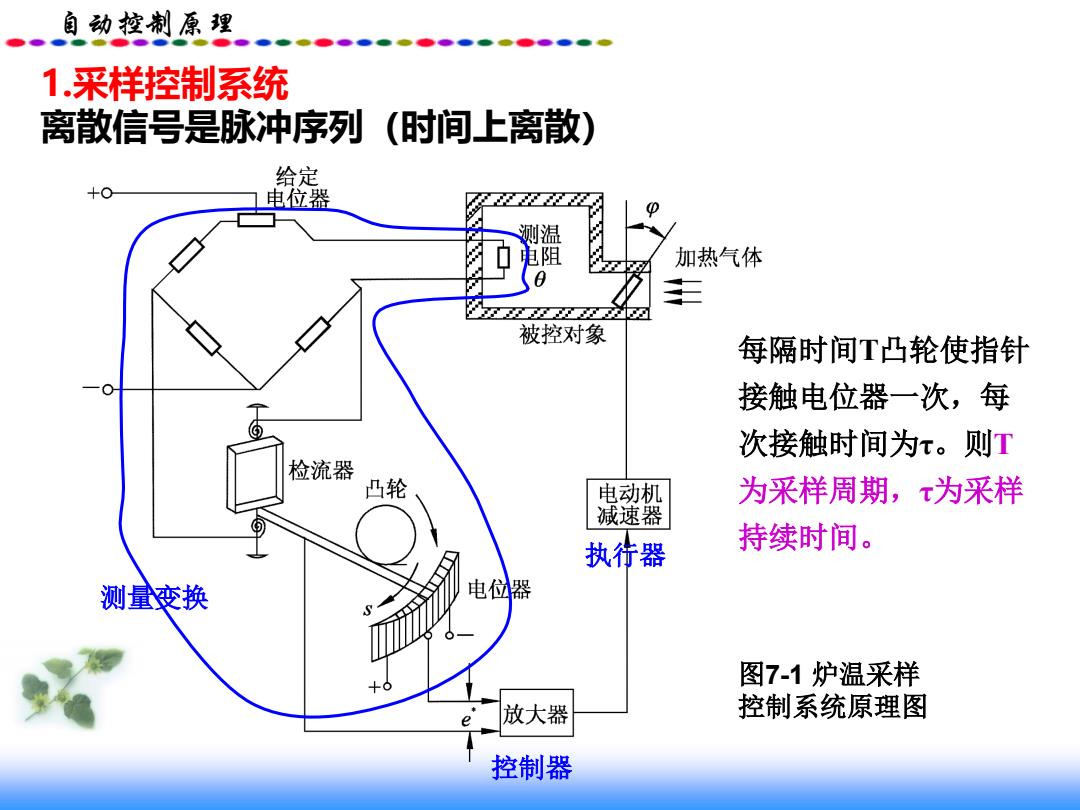
自动控制原理 1.采样控制系统 离散信号是脉冲序列(时间上离散) 图7-1 炉温采样 控制系统原理图 每隔时间T凸轮使指针 接触电位器一次,每 次接触时间为τ。则T 为采样周期,τ为采样 持续时间。 控制器 测量变换 执行器

自动控制原理 和连续控制系统相比,采样控制系统中的两个 特殊环节是:采样器和保持器。 (1)信号采样和复现 把连续信号变为脉冲序列的过程 称为采样过程,简称采样。 实现采样的装置称为采样器,或 连续量 离散量 采样开关。 T表采样周期,τ表示采样持续时间;一般τ<<T,理 想化为T→0. e (1 e(t) e(kT) 2T 3T
自动控制原理 把连续信号变为脉冲序列的过程 称为采样过程,简称采样。 实现采样的装置称为采样器,或 采样开关。 和连续控制系统相比,采样控制系统中的两个 特殊环节是:采样器和保持器。 (1)信号采样和复现 T表采样周期,τ表示采样持续时间;一般τ<<T,理 想化为τ→0