
《机器人建模与仿真》教学大纲 课程名称(汉):《机器人建模与仿真》 课程名称(英):Robot Modeling and Simulation 课程代码:263101031 课程类型:专业教育平台专业选修课程模块 适用对象:机器人工程专业三年级本科层次 学时/学分:48学时(其中理论32学时、实验16学时)/2.5学分 先修课程:《机械设计基础》、《机械制图》、《高等数学》、《线性代数》 方案版本:2021版 一、课程简介(150一200字) 《机器人建模与仿真》是面向机械制造自动化、机械电子工程、航空航天等 专业的一门研究生专业课程。本课程主要介绍机器人的基本原理及应用,阐述机 器人的性能仿真、运动与控制的基本理论与方法。通过本课程学习,使学生掌握 机器人的基本原理及知识,了解机器人运动模型的建立及性能指标的分析方法, 熟悉机器人的基本控制方法,为机器人的设计和应用提供技术支撑。 二、教学目标 课程目标1:掌握机器人运动学及动力学的基础理论与建模方法,掌握机器人控 制系统建模方法。 课程目标2:掌握Adams软件的仿真原理与基本操作,能熟练运用Adams进行串、 并联机器人的运动仿真。掌握基于MATLAB的控制仿真,能熟练运用Simulink进 行机器人的建模与仿真。掌握Adams与MATLAB的联合仿真方法。 课程目标3:培养运用数学方法及计算机软件分析、解决工程问题的能力。 三、课程目标对机器人工程专业毕业要求的支撑关系 毕业要求 毕业要求指标点(非认证专业可以省略本项内容) 课程目标 支撑 权重 问题分析 1、3 0.06 设计/开发解决方案 1、3 0.02 研究 1、2、3 0.07 使用现代工具 2、3 0.06 四、教学内容及其基本要求
《机器人建模与仿真》教学大纲 课程名称(汉):《机器人建模与仿真》 课程名称(英):Robot Modeling and Simulation 课程代码: 263101031 课程类型:专业教育平台专业选修课程模块 适用对象:机器人工程专业三年级本科层次 学时/学分:48 学时(其中理论 32 学时、实验 16 学时)/2.5 学分 先修课程:《机械设计基础》、《机械制图》、《高等数学》、《线性代数》 方案版本:2021 版 一、课程简介(150—200 字) 《机器人建模与仿真》是面向机械制造自动化、机械电子工程、航空航天等 专业的一门研究生专业课程。本课程主要介绍机器人的基本原理及应用,阐述机 器人的性能仿真、运动与控制的基本理论与方法。通过本课程学习,使学生掌握 机器人的基本原理及知识,了解机器人运动模型的建立及性能指标的分析方法, 熟悉机器人的基本控制方法,为机器人的设计和应用提供技术支撑。 二、教学目标 课程目标 1:掌握机器人运动学及动力学的基础理论与建模方法,掌握机器人控 制系统建模方法。 课程目标 2:掌握 Adams 软件的仿真原理与基本操作,能熟练运用 Adams 进行串、 并联机器人的运动仿真。掌握基于 MATLAB 的控制仿真,能熟练运用 Simulink 进 行机器人的建模与仿真。掌握 Adams 与 MATLAB 的联合仿真方法。 课程目标 3:培养运用数学方法及计算机软件分析、解决工程问题的能力。 三、课程目标对机器人工程专业毕业要求的支撑关系 毕业要求 毕业要求指标点(非认证专业可以省略本项内容) 课程目标 支撑 权重 问题分析 1、3 0.06 设计/开发解决方案 1、3 0.02 研究 1、2、3 0.07 使用现代工具 2、3 0.06 四、教学内容及其基本要求

序号 对应课程 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 目标 重点:机器人建模与仿真的内容 教学方法:讲授+讨论 1 第1章绪论 1、3 教学要求:理解、掌握机器人建模与仿真的内容与 意义。 重点:机器人的数学基础及建模方法 第2章机器人系 难点:机器人的数学基础及建模方法 统与建模基础 1、3 教学方法:讲授+讨论 教学要求:掌握机器人的数学基础和建模方法。 重点:多刚体动力学建模与求解:Adams运动及动 力学仿真 第3章Adams仿 真原理与基本操 难点:多刚体动力学建模与求解:Adams运动及动 作 力学仿真 1、3 实践1:Adams基 教学方法:讲授+讨论 本操作 教学要求:掌握多刚体动力学建模与求解的方法: 熟练运用Adams进行运动学和动力学仿真。 重点:机器人的运动学仿真 第4章移动机器人 难点:机器人的运动学仿真 运动仿 2 教学方法:讲授+讨论 实践2:移动机器 1、3 人运动仿真 教学要求:掌握两轮机器人及自平衡机器人的运动 学仿真方法及步骤。 重点:串联及并联机器人的运动仿真 第5章臂式机器 难点:串联及并联机器人的运动仿真 人运动仿真 教学方法:讲授+讨论 1、2、3 实践3:并联机器 人运动仿真 教学要求:掌握串联及并联机器人的运动仿真方法 及步骤,并能熟练运用Adams软件进行仿真。 第6章MATLAB 重点:Matlab软件程序设计:Simulink仿真基础 程序设计与仿真 难点:Simulink仿真基础 6 基础 教学方法:讲授+讨论 1、2、3 实践4:Matlab调 教学要求:了解MATLAB软件及简单的程序设计: 试 初步掌握用Simulink进行等动态系统仿真的方法。 重点:PID控制:反馈控制仿真:反步法原理:轨 第7章移动机器人 迹跟踪控制仿真: 控制仿真 实践5:Matlab 难点:反馈控制仿真:轨迹跟踪控制仿真: 1、2、3 Simulink移动机器 教学方法:讲授+讨论 人控制仿真 教学要求:掌握机器人的反馈控制仿真及反步法控 制仿真的方法,能够运用Simulink进行控制仿真
序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 对应课程 目标 1 第 1 章 绪论 重点:机器人建模与仿真的内容 教学方法:讲授+讨论 教学要求:理解、掌握机器人建模与仿真的内容与 意义。 1、3 2 第 2 章 机器人系 统与建模基础 重点:机器人的数学基础及建模方法 难点:机器人的数学基础及建模方法 教学方法:讲授+讨论 教学要求:掌握机器人的数学基础和建模方法。 1、3 1 第3章 Adams 仿 真原理与基本操 作 实践 1: Adams 基 本操作 重点:多刚体动力学建模与求解;Adams 运动及动 力学仿真 难点:多刚体动力学建模与求解;Adams 运动及动 力学仿真 教学方法:讲授+讨论 教学要求:掌握多刚体动力学建模与求解的方法; 熟练运用 Adams 进行运动学和动力学仿真。 1、3 2 第4章 移动机器人 运动仿 实践 2:移动机器 人运动仿真 重点:机器人的运动学仿真 难点:机器人的运动学仿真 教学方法:讲授+讨论 教学要求:掌握两轮机器人及自平衡机器人的运动 学仿真方法及步骤。 1、3 5 第5章 臂 式机 器 人运动仿真 实践 3:并联机器 人运动仿真 重点:串联及并联机器人的运动仿真 难点:串联及并联机器人的运动仿真 教学方法:讲授+讨论 教学要求:掌握串联及并联机器人的运动仿真方法 及步骤,并能熟练运用 Adams 软件进行仿真。 1、2、3 6 第6章 MATLAB 程序设计与仿真 基础 实践 4:Matlab 调 试 重点:Matlab 软件程序设计;Simulink 仿真基础 难点:Simulink 仿真基础 教学方法:讲授+讨论 教学要求:了解 MATLAB 软件及简单的程序设计; 初步掌握用 Simulink 进行等动态系统仿真的方法。 1、2、3 7 第7章 移动机器人 控制仿真 实 践 5 : Matlab Simulink 移动机器 人控制仿真 重点:PID 控制;反馈控制仿真;反步法原理;轨 迹跟踪控制仿真; 难点:反馈控制仿真;轨迹跟踪控制仿真; 教学方法:讲授+讨论 教学要求:掌握机器人的反馈控制仿真及反步法控 制仿真的方法,能够运用 Simulink 进行控制仿真。 1、2、3

序号 对应课程 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 目标 第8章臂式机器人 重点:机械臂的PD控制仿真、滑模控制仿真 控制仿真 难点:机械臂的PD控制仿真、滑模控制仿真 8 实践6:Matlab 1、2、3 Simulink臂式机器 教学方法:讲授+讨论 人控制仿真 教学要求:机械臂的PID控制仿真、滑模控制仿真。 第9章Adams与 MATLAB联合机 器人仿真 重点:Adams与MATLAB联合仿真 实践7:前轮转向 难点:Adams与MATLAB联合仿真 9 驱动型机器人联 教学方法:讲授+讨论 2、3 合仿真 教学要求:掌握Adams与MATLAB联合机器人的 实践8:直角坐标 仿真方法,能够熟练进行联合仿真。 型机器人联合仿 真 五、各教学环节及学时分配 教学环节及学时 知识棋块 教学内容 授 习题课 讨论 实验(实践) 计 1.1机器人概述 1.11机器人的定义 第1章绪论 1 1.1.2机器人的发展 1.2建模与仿真 2.1机器人系统 2.11移动机器人系统 第2章机器人系统 2.1.2臂式机器人系统 与建模基础 5 2.2机器人建模基础 5 2.2.1数学基础 2.2.2建模方法 3.1 Adams仿真原理 3.1.1多刚体动力学 3.1.2建模与求解 3.2 Adams软件介绍 第3章Adams仿真 3.2.1基本仿真模块 2 24 原理与基本操作 3.2.2附加程序模块 3.3建模与仿真基本操作 3.3.1模型的建立 3.3.2约束的添加 3.3.3仿真与后处理
序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 对应课程 目标 8 第8章 臂式机器人 控制仿真 实 践 6 : Matlab Simulink 臂式机器 人控制仿真 重点:机械臂的 PID 控制仿真、滑模控制仿真 难点:机械臂的 PID 控制仿真、滑模控制仿真 教学方法:讲授+讨论 教学要求:机械臂的 PID 控制仿真、滑模控制仿真。 1、2、3 9 第9章 Adams 与 MATLAB 联合机 器人仿真 实践 7:前轮转向 驱动型机器人联 合仿真 实践 8:直角坐标 型机器人联合仿 真 重点:Adams 与 MATLAB 联合仿真 难点:Adams 与 MATLAB 联合仿真 教学方法:讲授+讨论 教学要求:掌握 Adams 与 MATLAB 联合机器人的 仿真方法,能够熟练进行联合仿真。 2、3 五、各教学环节及学时分配 知识模块 教学内容 教学环节及学时 讲 授 课 习 题 课 讨 论 课 实 验 ( 实 践 ) 合 计 第 1 章 绪论 1.1 机器人概述 1.1.1 机器人的定义 1.1.2 机器人的发展 1.2 建模与仿真 1 1 第 2 章 机器人系统 与建模基础 2.1 机器人系统 2.1.1 移动机器人系统 2.1.2 臂式机器人系统 2.2 机器人建模基础 2.2.1 数学基础 2.2.2 建模方法 5 5 第 3 章 Adams 仿真 原理与基本操作 3.1 Adams 仿真原理 3.1.1 多刚体动力学 3.1.2 建模与求解 3.2 Adams 软件介绍 3.2.1 基本仿真模块 3.2.2 附加程序模块 3.3 建模与仿真基本操作 3.3.1 模型的建立 3.3.2 约束的添加 3.3.3 仿真与后处理 2 2 4

教学环节及学时 知识棋块 教学内容 讲授 习题 论课 实验(实戰) 年 41两轮机器人运动仿真 4.1.1配置软件环境 4.1.2创建几何模型 4.1.3加载模型约束 第4章移动机器人 4.1.4仿真测量与结果显示 2 24 运动仿真 4.2自平衡机器人运动仿真 4.2.1模型建立与导入 4.2.2配置环境与约束加载 4.2.3控制模块搭建 4.2.4运动控制仿真 5.1串联机械臂运动仿真 5.1.1串联机器人模型 第5章臂式机器人 5.1.2仿真与结果 4 26 运动仿真 5.2并联机械臂运动仿真 5.2.1并联机器人模型 5.2.2仿真与解算 6.1 MATLAB程序设计 第6章MATLAB 6.1.1数值计算与绘图 程序设计与仿真基 6.1.2脚本文件与程序设计 26 6.2 Simulink仿真基础 4 础 6.2.1仿真环境介绍 6.2.2动态系统仿真 7.1移动机器人反馈控制仿真 7.1.1PID控制 第7章移动机器人 7.1.2反馈控制仿真 4 2 6 控制仿真 7.2移动机器人反步法控制仿真 7.2.1反步法原理 7.2.2轨迹跟踪控制仿真 8.1机械臂PID控制仿真 8.1.1机械臂控制方法 第8章臂式机器人 8.1.2控制仿真实例 4 2 6 控制仿真 8.2机械臂滑模控制仿真 8.2.1滑模控制方法 8.2.2控制仿真实例
知识模块 教学内容 教学环节及学时 讲 授 课 习 题 课 讨 论 课 实 验 ( 实 践 ) 合 计 第 4 章 移动机器人 运动仿真 4.1 两轮机器人运动仿真 4.1.1 配置软件环境 4.1.2 创建几何模型 4.1.3 加载模型约束 4.1.4 仿真测量与结果显示 4.2 自平衡机器人运动仿真 4.2.1 模型建立与导入 4.2.2 配置环境与约束加载 4.2.3 控制模块搭建 4.2.4 运动控制仿真 2 2 4 第 5 章 臂式机器人 运动仿真 5.1 串联机械臂运动仿真 5.1.1 串联机器人模型 5.1.2 仿真与结果 5.2 并联机械臂运动仿真 5.2.1 并联机器人模型 5.2.2 仿真与解算 4 2 6 第 6 章 MATLAB 程序设计与仿真基 础 6.1 MATLAB 程序设计 6.1.1 数值计算与绘图 6.1.2 脚本文件与程序设计 6.2 Simulink 仿真基础 6.2.1 仿真环境介绍 6.2.2 动态系统仿真 4 2 6 第 7 章 移动机器人 控制仿真 7.1 移动机器人反馈控制仿真 7.1.1 PID 控制 7.1.2 反馈控制仿真 7.2 移动机器人反步法控制仿真 7.2.1 反步法原理 7.2.2 轨迹跟踪控制仿真 4 2 6 第 8 章 臂式机器人 控制仿真 8.1 机械臂 PID 控制仿真 8.1.1 机械臂控制方法 8.1.2 控制仿真实例 8.2 机械臂滑模控制仿真 8.2.1 滑模控制方法 8.2.2 控制仿真实例 4 2 6
教学环节及学时 知识棋块 教学内容 讲 习 论 实验(实戰) 课 课 计 9.1前轮转向驱动型机器人仿真 9.1.1机械系统模型 9.1.2控制系统模型 第9章Adams与 9.1.3联合仿真结果 MATLAB联合机器 4 48 人仿真 9.2直角坐标型机器人仿真 9.2.1机械系统模型 9.2.2控制系统模型 9.2.3联合仿真结果 总复习 总结课程主要知识点和重难点 2 2 合计 32 16 48 六、成绩考核及基本要求 建 考核 议 对应课程 考核/评价细则 环节 分 目标 值 迟到1次扣1分,旷课1次扣2分,其它如不遵守课堂纪律 出勤成绩 10 3 等根据具体情况减扣,有其它优异表现可以酌情加分。 作业成绩 20 次作业不完成减扣2分。 1、2、3 建模正确,仿真结果准确,实验报告清晰、完整、正确:18-20: 实验成绩 20 1、2、3 次之:16-18:再次之:14-16,基本合格:12-14:较差:8-12。 考试成绩 50 根据试卷评分规则考核。 1、2 七、教材与主要教学参考资源 (一)推荐教材与参考书 推荐教材: 1.李艳生,杨美美等, 《机器人系统建模与仿真》,北京邮电大学出版社 参考教材: 2.蔡自兴,谢斌,《机器人学(第三版)》,清华大学出版社。 3.黎明安、钱利,《MatIab/.Simulink动力学系统建模与仿真》,国防工业 出版社,2015.7 4.于玲,《工业机器人虚拟仿真技术》,北京邮电大学出版社,2019.11 5.禹鑫燚,王振华等,《工业机器人虚拟仿真技术》,机械工业出版社, 2021.1 (二)推荐网站(包括课程网站、专业网站等) 北京信息科技大学学校云:
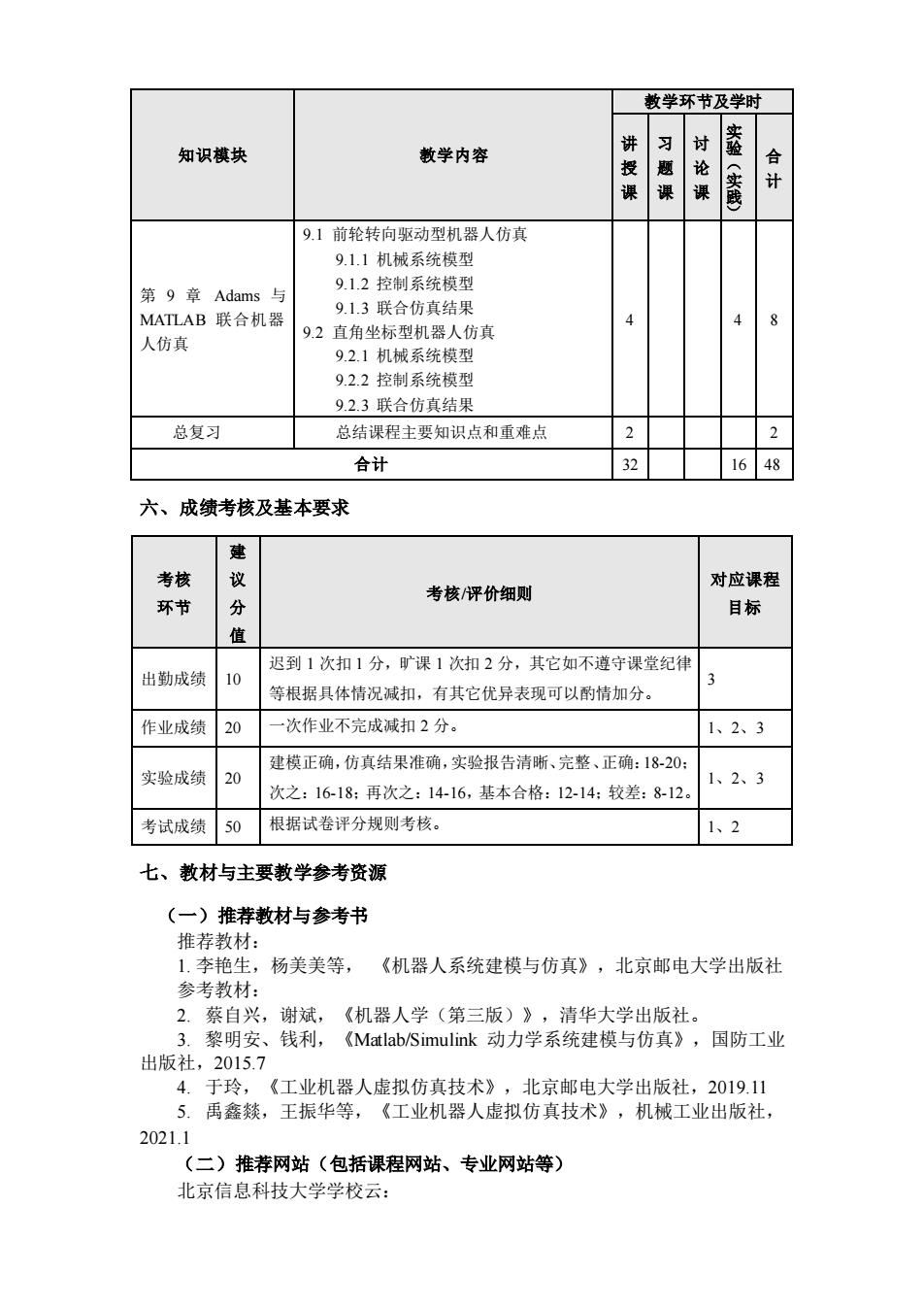
知识模块 教学内容 教学环节及学时 讲 授 课 习 题 课 讨 论 课 实 验 ( 实 践 ) 合 计 第 9 章 Adams 与 MATLAB 联合机器 人仿真 9.1 前轮转向驱动型机器人仿真 9.1.1 机械系统模型 9.1.2 控制系统模型 9.1.3 联合仿真结果 9.2 直角坐标型机器人仿真 9.2.1 机械系统模型 9.2.2 控制系统模型 9.2.3 联合仿真结果 4 4 8 总复习 总结课程主要知识点和重难点 2 2 合计 32 16 48 六、成绩考核及基本要求 考核 环节 建 议 分 值 考核/评价细则 对应课程 目标 出勤成绩 10 迟到 1 次扣 1 分,旷课 1 次扣 2 分,其它如不遵守课堂纪律 等根据具体情况减扣,有其它优异表现可以酌情加分。 3 作业成绩 20 一次作业不完成减扣 2 分。 1、2、3 实验成绩 20 建模正确,仿真结果准确,实验报告清晰、完整、正确:18-20; 次之:16-18;再次之:14-16,基本合格:12-14;较差:8-12。 1、2、3 考试成绩 50 根据试卷评分规则考核。 1、2 七、教材与主要教学参考资源 (一)推荐教材与参考书 推荐教材: 1. 李艳生,杨美美等, 《机器人系统建模与仿真》,北京邮电大学出版社 参考教材: 2. 蔡自兴,谢斌,《机器人学(第三版)》,清华大学出版社。 3. 黎明安、钱利,《Matlab/Simulink 动力学系统建模与仿真》,国防工业 出版社,2015.7 4. 于玲,《工业机器人虚拟仿真技术》,北京邮电大学出版社,2019.11 5. 禹鑫燚,王振华等,《工业机器人虚拟仿真技术》,机械工业出版社, 2021.1 (二)推荐网站(包括课程网站、专业网站等) 北京信息科技大学学校云: