机器人操作系统(ROS)
机器人操作系统(ROS)
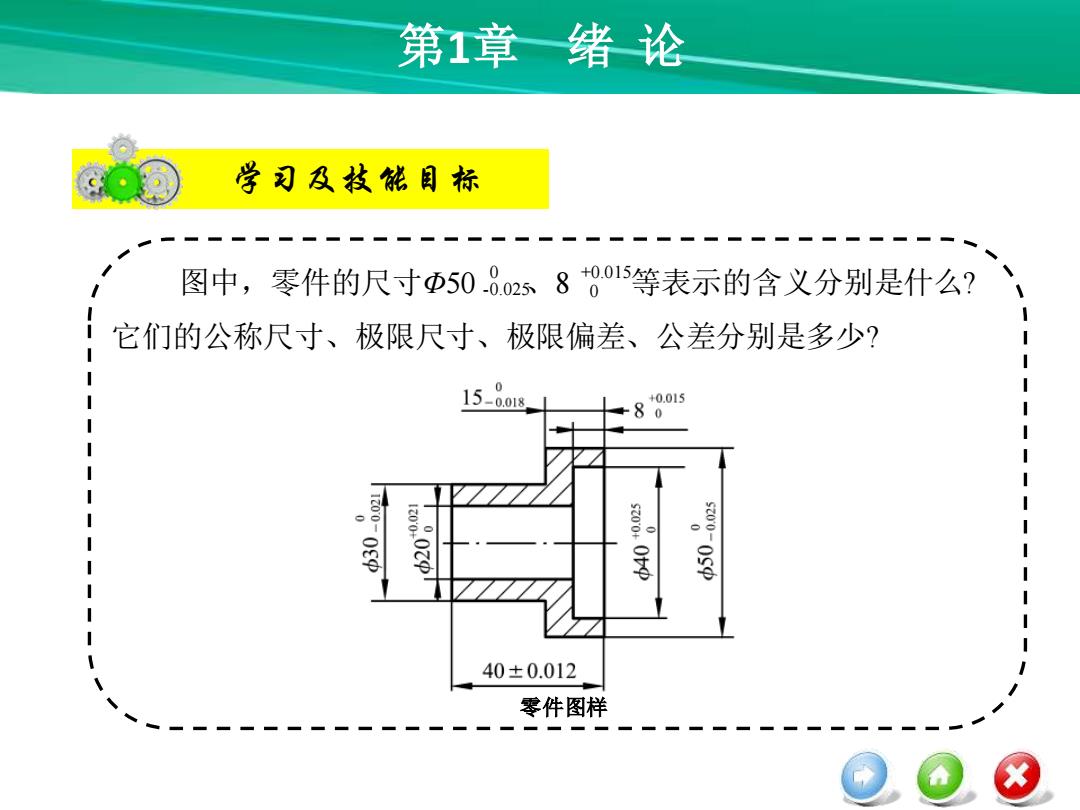
第1章绪论 学习及技能目标 图中,零件的尺寸Φ50.8288015等表示的含义分别是什么? 它们的公称尺寸、极限尺寸、极限偏差、公差分别是多少? I I 0 I I 15-0.018 +0.015 x80 I I I I I I I I I 1700-0 I 1200 52oo Otp 8200- I I I I I I I I I 40±0.012 零件图样
第1章 绪 论 学习及技能目标 图中,零件的尺寸Φ50 、8 等表示的含义分别是什么? 它们的公称尺寸、极限尺寸、极限偏差、公差分别是多少? 0 -0.025 +0.015 0 零件图样
第1章极限与配合及检测 学习目标 通过本章的学习,学生应掌握以下知识及技能: 1·理解有关公差、极限偏差等术语的定义及有关计算,并 会查表标注尺寸的极限偏差值。 2.理解配合制的概念及公差等级的选用、配合类型的选择 3.掌握零件检测(测量方法、测量误差、测量精度等)的 基础知识。 4.能正确使用游标卡尺、外径千分尺等测量工具对典型零 、件进行测量
第1章 极限与配合及检测 学习目标 通过本章的学习,学生应掌握以下知识及技能: 1.理解有关公差、极限偏差等术语的定义及有关计算,并 会查表标注尺寸的极限偏差值。 2.理解配合制的概念及公差等级的选用、配合类型的选择。 3.掌握零件检测(测量方法、测量误差、测量精度等)的 基础知识。 4.能正确使用游标卡尺、外径千分尺等测量工具对典型零 件进行测量
第1章绪论 11什么叫机器人 12机器人系统的构成 1.3 机器人研发的原则 技能训练 8
第1章 绪 论 1.1 什么叫机器人 1.2 机器人系统的构成 1.3 机器人研发的原则 技能训练

课程介绍 为什么要学习ROS ROS:Robot Operating System,机器人操作系统 通信机制 开发工具 应用功能 生态系练 https://robonaut.jsc.nasa.gov/r2/ 8
课程介绍 为什么要学习ROS https://robonaut.jsc.nasa.gov/r2/