自动控制原理 第六章线性系统的校正方法 6-1系统的设计与校正问题 6-2串联校正 6-3反馈校正 E 6-4复合校正
自动控制原理 第六章 线性系统的校正方法 6-1 系统的设计与校正问题 6-2 串联校正 6-3 反馈校正 6-4 复合校正

自动控制原理 6-1系统的设计与校正问题 系统分析: ■实际系统→建模→计算→性能指标研究性能指 标与参数间的关系。 系统设计: ■被控对象,控制要求一→选择元部件一→固有系统 →校正→满足要求的系统
自动控制原理 6-1 系统的设计与校正问题 ◼ 系统分析: ◼ 实际系统→建模→计算→性能指标,研究性能指 标与参数间的关系。 ◼ 系统设计: ◼ 被控对象,控制要求→选择元部件→固有系统 →校正→满足要求的系统

自动控制原理 一、性能指标 1、【 时域性能指标:δ%、、ss。 2、频域性能指标 闭环频域指标:Mr,®.,M(O); 开环频域指标:Y,oe,Kpwa 3、频域与时域指标间的关系 一阶系统:0=74= 3
自动控制原理 一、性能指标 1、时域性能指标:%、ts、ess 。 2、频域性能指标 闭环频域指标: Mr,b ,M(0) ; 开环频域指标: ,c ,Kp/v/a 3、频域与时域指标间的关系 一阶系统: 1 3 , b s b t T = =
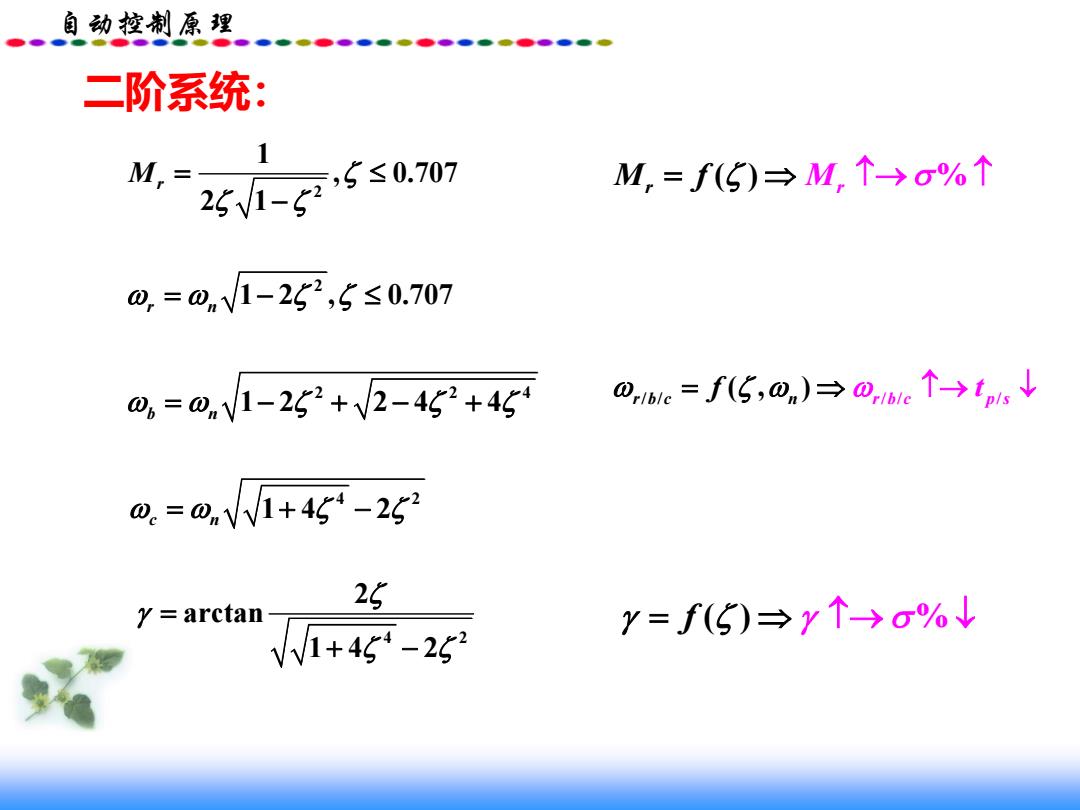
自动控制原理 二阶系统: g,6≤0.707 1 M,2 M,=f(5)→M,↑→o%个 0,=mV1-252,5≤0.707 0。=0V/1-252+V2-452+454 @,1e=f(5,0)→@,be个-→tps↓ w.=0n/V1+454-262 25 y arctan VV1+45-262 Y=f(5)→y个→σ%↓
自动控制原理 二阶系统: 2 1 , 0.707 2 1 M r = − 2 1 2 , 0.707 r n = − 2 2 4 1 2 2 4 4 b n = − + − + 4 2 1 4 2 c n = + − 4 2 2 arctan 1 4 2 = + − M f r = ( ) M r → % = f ( ) → % / / / / / ( , ) r b c n r b c p s = f → t
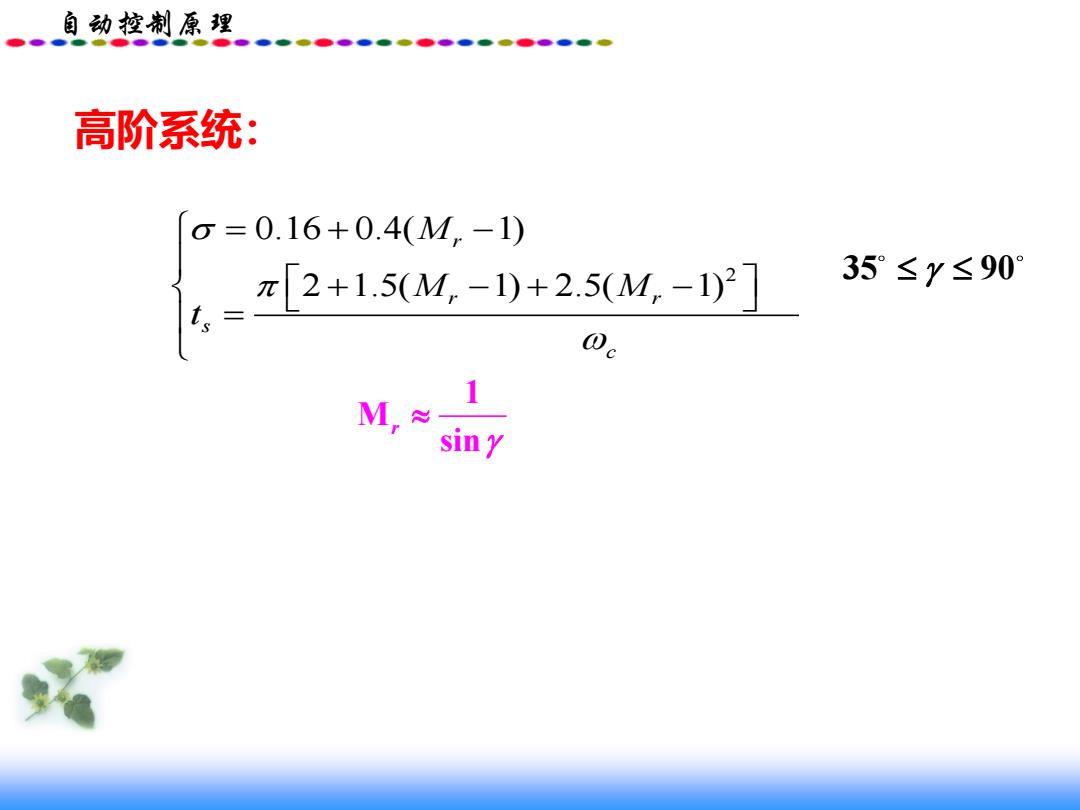
自动控制原理 高阶系统: σ=0.16+0.4(M,-1) π2+1.5(M,-1)+2.5(M.-1)27 35°≤y≤901 0o M,≈ siny
自动控制原理 高阶系统: 2 0.16 0.4( 1) 2 1.5( 1) 2.5( 1) r r r s c M M M t = + − + − + − = (5-77) (5-78) 1 M sin r 35 90