
表5-1 值班员控制命令与信号显示对照表 作业方 驼峰信号 遥控 要求机车 控制命令 式 显示 控制命令 走行速度 车上显示 预推 10 km/h 预推 预推 红 预减 减速推送 预减距离180米 预停 预推停车 预停距离80米 绿闪 9-15km/h 9-15km/h 9-15km/h 绿灯 6-8 km/h 6-8km/h 6-8 km/h 黄闪 3-5 km/h 3-5 km/h 3-5 km/h 禁快 <5 km/h 禁快 主推 白闪 禁慢 ≤3km/h 禁慢 红闪 后退 ≤7km/h 后退 红灯 停车 停车 停车 白灯 下峰 手动 下峰 注:预推停车的停车点可根据用户要求协商确定,停车距离精度±15m
表5–1 值班员控制命令与信号显示对照表 作业方 式 驼峰信号 显示 遥控 控制命令 要求机车 走行速度 控制命令 车上显示 预推 红 预推 10 km/h 预推 预减 减速推送 预减距离180米 预停 预推停车 预停距离80米 主推 绿闪 9-15 km/h 9-15 km/h 9-15 km/h 绿灯 6-8 km/h 6-8 km/h 6-8 km/h 黄闪 3-5 km/h 3-5 km/h 3-5 km/h 白闪 禁快 ≤5 km/h 禁快 禁慢 ≤3 km/h 禁慢 红闪 后退 ≤7 km/h 后退 红灯 停车 停车 停车 白灯 下峰 手动 下峰 注:预推停车的停车点可根据用户要求协商确定,停车距离精度±15m

表5-2 计算机控制信号与显示对照表 作业方式 驼峰信号 遥控 要求机车 控制命令 显示 控制命令 走行速度 车上显示 预推 10 km/h 预推 预推 红 预减 减速推送 预减距离180米 预停 预推停车 预停距离80米 绿闪 9-15km/h 9-15km/h 9-15km/h 绿灯 6-8 km/h 6-8 km/h 6-8 km/h 黄闪 3-5 km/h 3-5 km/h 3-5 km/h 禁快 s5 km/h 禁快 主推 白闪 禁慢 s3 km/h 禁慢 红闪 后退 s7 km/h 后退 红灯 停车 停车 停车 白灯 下峰 手动 下蜂 注:预推停车的停车点可根据用户要求协商确定,停车距离精度±15m
表5–2 计算机控制信号与显示对照表 作业方式 驼峰信号 显示 遥控 控制命令 要求机车 走行速度 控制命令 车上显示 预推 红 预推 10 km/h 预推 预减 减速推送 预减距离180米 预停 预推停车 预停距离80米 主推 绿闪 9-15 km/h 9-15 km/h 9-15 km/h 绿灯 6-8 km/h 6-8 km/h 6-8 km/h 黄闪 3-5 km/h 3-5 km/h 3-5 km/h 白闪 禁快 ≤5 km/h 禁快 禁慢 ≤3 km/h 禁慢 红闪 后退 ≤7 km/h 后退 红灯 停车 停车 停车 白灯 下峰 手动 下峰 注:预推停车的停车点可根据用户要求协商确定,停车距离精度±15m

二、系统组成 系统是由地面设备及车载设备两部分组成。 地面设备由机车遥控主机及有关接口设备组成,车载 设备采用车载微处理机及有关接口电路构成: 在一个站场,选用一组双工无线频点,可同时控制 四台机车进行主推送及预先推送作业
二、系统组成 系统是由地面设备及车载设备两部分组成。 地面设备由机车遥控主机及有关接口设备组成,车载 设备采用车载微处理机及有关接口电路构成。 在一个站场,选用一组双工无线频点,可同时控制 四台机车进行主推送及预先推送作业
1.地面设备 (|)地面控制计算机机柜(包含控制主机及地面数传电台 主备机各两套)。 (2)定向天线两个,安装在机房楼顶。 (3)作为独立系统时设置一台前置机。 (4)地面计算机采用航空用PC-104工业控制机、I/O 总线方式。其设备配置图如图5-4所示。 主板 总线驱动板 /o板 动态采样板 动态采样板 图5-4地面主机配置图
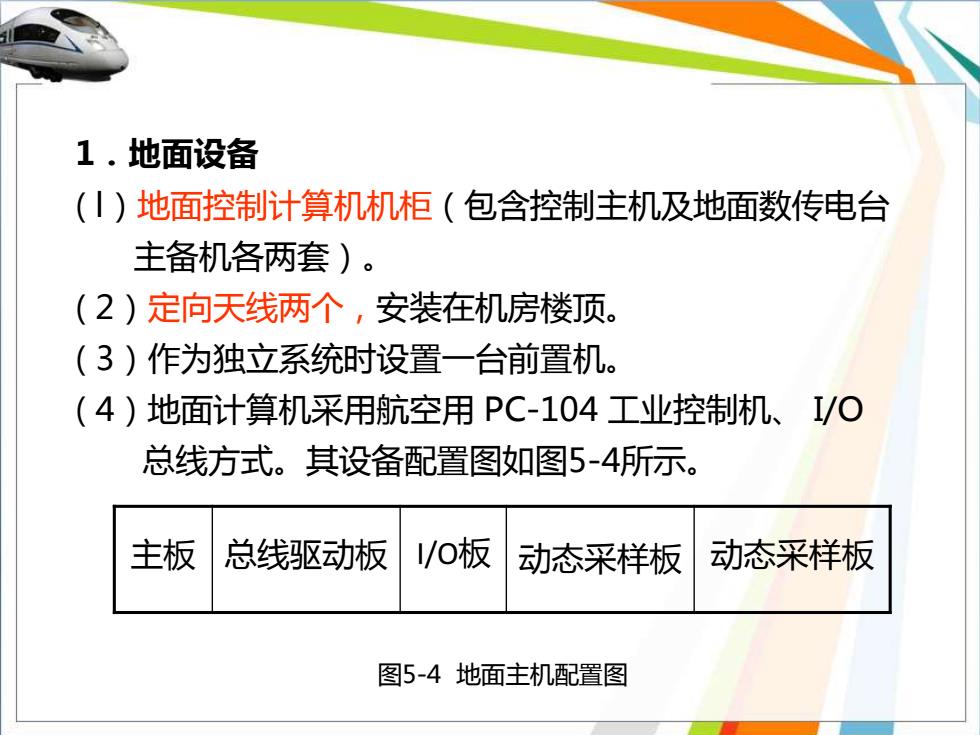
1.地面设备 ( l)地面控制计算机机柜(包含控制主机及地面数传电台 主备机各两套)。 ( 2)定向天线两个,安装在机房楼顶。 ( 3)作为独立系统时设置一台前置机。 ( 4)地面计算机采用航空用 PC-104 工业控制机、 I/O 总线方式。其设备配置图如图5-4所示。 主板 总线驱动板 I/O板 动态采样板 动态采样板 图5-4 地面主机配置图