第二节步进伺服驱动控制 ,步进电机 (3)步进电动机的特点 步进电机的缺点: ·如果控制不当容易产生共振; ·难以运转到较高的转速; ·难以获得较大的转矩; ·在体积重量方面没有优势,能源利用率低: ·超过负载时会破坏同步,高速工作时会发出振动和噪声。 主页●日录上-页●下-页●后退●退出
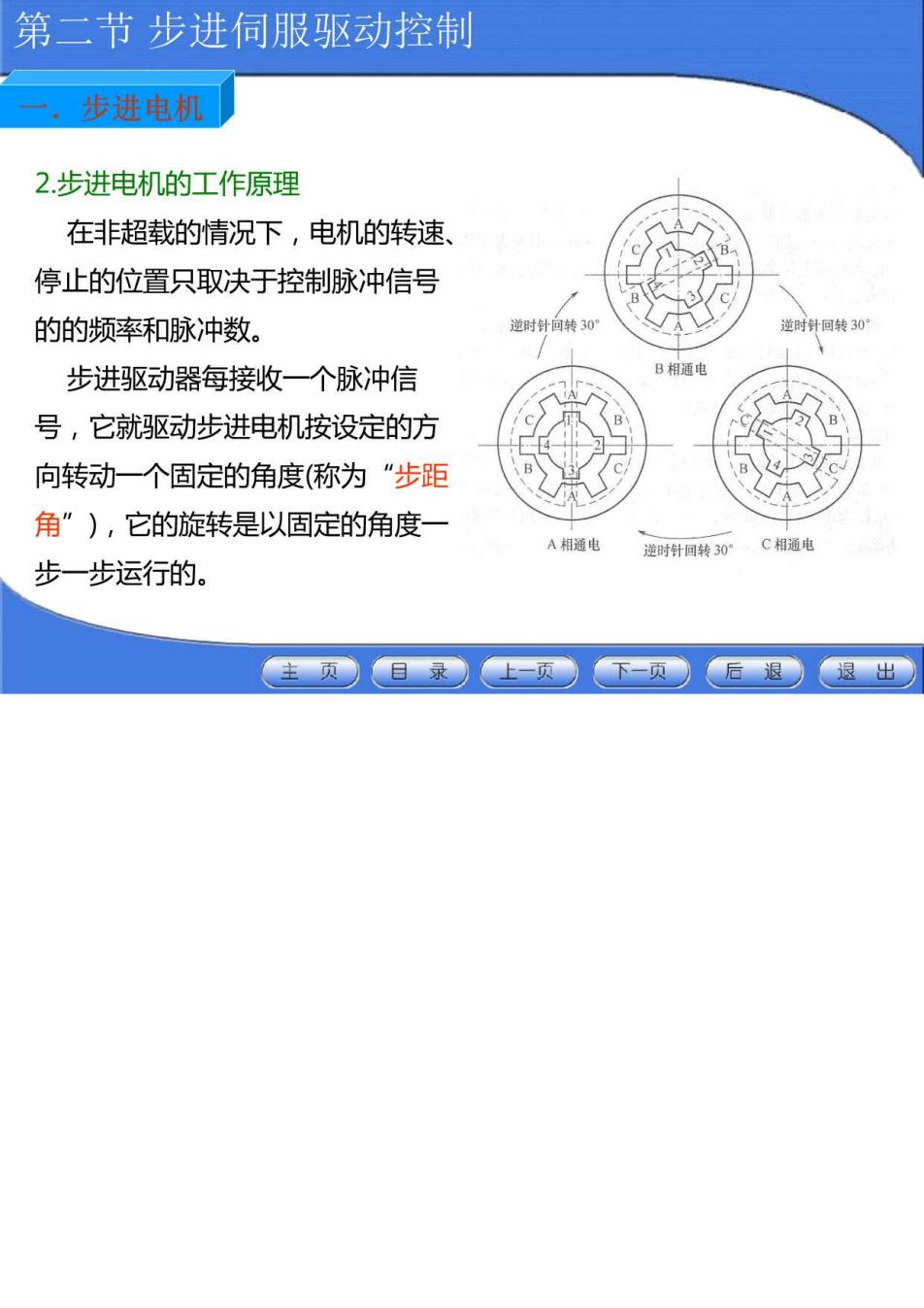
第二节步进伺服驱动控制 步进电机 2.步进电机的工作原理 在非超载的情况下,电机的转速、 停止的位置只取决于控制脉冲信号 的的频率和脉冲数。 时针回转30 逆时针回转30 步进驱动器每接收一个脉冲信 B相通电 号,它就驱动步进电机按设定的方 向转动一个固定的角度(称为“步距 角”),它的旋转是以固定的角度一 A相通电 逆时针同转30 C相渐电 步一步运行的。 主页●目录 上一页●下-页●后退●退出

第二节步进伺服驱动控制 步进电机 2.步进电机的工作原理 通过控制脉冲个数控制角 位移量的大小;通过控制脉冲 频率来控制电机转动的速度和 逆时针间转30 逆时针回转30 加速度;通过控制各相通电顺 相通电 序控制电机的转向。 B A相通电 逆时针回转30 C相通电 主页●日录上-页●下-页●后退●退出
第二节步进伺服驱动控制 步进电机 3.步进电机的主要特性 1)步距角与步距精度 步距角指步进电机定子绕组通电状态每改变一次,转子转过的角度。 步距角计算: a=3600 m:定子相数;z:转子齿数; mzk k:拍数与相数的比例系数 步距精度:实测步距角与理论步距角之差,也称步距误差。 主页●目录上一页下-页●后退 退出

第二节步进伺服驱动控制 ,步进电机 3.步进电机的主要特性 2)启动频率 空载时,步进电机由静止状态突然启动,并进入不丢步的正常运行 的最高频率。 3)连续运行的最高工作频率 步进电机连续运行时,不丢步运行的极限频率。 主页●日录上-页●下-页●后退●退出