
例6一2倒摆系统 0 1 0 0 0 0 -1 0 0 0 0 I 10 0 0 11 -1 y=000] 系统是能控的,但系统不稳定的,要求将系统极,点配置在 -1,-2,-1+)和-1+,求状态反馈向量k
例 6-2 倒摆系统 u x x x x x x x x ⎥⎥⎥⎥⎦⎤ ⎢⎢⎢⎢⎣⎡− +⎥⎥⎥⎥⎦⎤ ⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤ ⎢⎢⎢⎢⎣⎡ − =⎥⎥⎥⎥⎦⎤ ⎢⎢⎢⎢⎣⎡ 1010 0 0 11 0 0 0 0 1 0 0 1 0 0 1 0 0 4321 4321 &&&& [ ] ⎥⎥⎥⎥⎦⎤ ⎢⎢⎢⎢⎣⎡ = 4321 1 0 0 0 xxxx y 系统是能控的,但系统不稳定的,要求将系统极点配置在 −1 , , 和 ,求状态反馈向量 。 −2 −1+ j −1+ j k

按极,点配置要求,可求得期望的特征多项式 A(s)=(s+10(s+2s+1-js+1+)=34+5s3+10s2+10s+4 元1=5,a2=10,a3=10,a4=4 原系统的特征多项式为 △(s)=s4-11s2 ag1=0,a2=-11,a3=0,a4=0 于是 K=[a4-a4a3-a43a2-a2a-1]=[410215] 系统能控标准型的等价变换阵为 0 10 0 P= 0 0 0 0 0 0 -1 0 0 0 -1 所以 k=kP=[-0.4 -1 -21.4-61
, , 按极点配置要求,可求得期望的特征多项式 ( ) ( 1)( 2)( 1 )( 1 ) 5 10 10 4 4 3 2 Δ s = s + s + s + − j s + + j = s + s + s + s + α1 = 5, α 2 = 10, α 3 = 10, α 4 = 4 原系统的特征多项式为 4 2 Δ(s) = s −11s α1 = 0, α 2 = −11, α 3 = 0, α 4 = 0 于是 [ ] [ 4 10 21 5 ] k = α 4 −α 4 α 3 −α 3 α 2 −α 2 α1 −α1 = 系统能控标准型的等价变换阵为 ⎥⎥⎥⎥⎥⎥⎦⎤ ⎢⎢⎢⎢⎢⎢⎣⎡ − − − − − − = 0 0 0 1 0 0 1 0101 0 101 0 0 101 0 101 P 所以 k = kP = [-0.4 -1 -21.4 -6 ]
2)比较系数法 先按极,点配置的要求,计算期望的特征多项式,建立等式 det(sl-(A-bk)=s”+asm-+…+an-S+an (6-38) 比较式(6一38)等式两边对应项系数,便可求得组成k的n个 未知数。 在上例中 0 1 0 0 -k-1 A-bk= 一k1 一k2 一k4 0 0 0 1 k2 11+k3 ka det(sl-(A-bk)=s4+(k2-k4)s3+(k-k3-11)s2-10k2s-10k =s4+5s3+10s2+10s+4 比较上式两边对应项的系数,可得 k1=-0.4 k2=-1 k3=-21.4 k4=-6
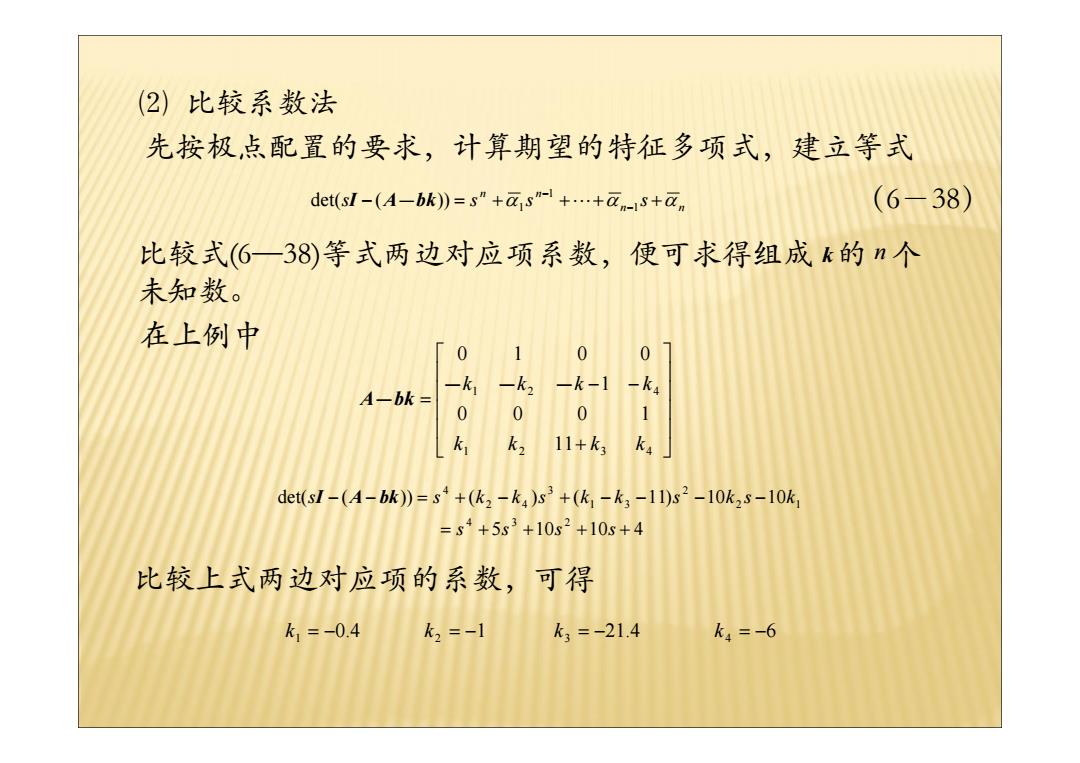
先按极点配置的要求,计算期望的特征多项式,建立等式 n n n n s − = s + α s + + α − s + α − 1 1 1 det( I (A -bk)) L (6-38) 比较式(6—38)等式两边对应项系数,便可求得组成 的 个 未知数。 k n 在上例中 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − − = 1 2 3 4 1 2 4 11 0 0 0 1 1 0 1 0 0 k k k k - k - k - k k A -bk 5 10 10 4 det( ( )) ( ) ( 11) 10 10 4 3 2 2 1 2 1 3 3 2 4 4 = + + + + − − = + − + − − − − s s s s sI A bk s k k s k k s k s k 比较上式两边对应项的系数,可得 0.4 1 21.4 6 k1 = − k 2 = − k3 = − k 4 = − ⑵ 比较系数法

状态反馈向量 k=[-0.4-1-21.4-6] 单输入系统,期望极点一旦确定,状态反馈向量k是唯 一的。 于是,状态反馈系统的状态空间描述: =(A-bk)x+br y=cx 「010 0Tx11 0 0 0 0x: 0 0 -1 0x2 0.4 21.4 6 X2 0 0 0 1 0 0 0 0 0 0 11 -0.4 -21.4 6 -1 y= 0 00
于是,状态反馈系统的状态空间描述: cx x A bk x b = = + y & ( - ) r [ ] ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 4 3 2 1 4 3 2 1 4 3 2 1 4 3 2 1 1 0 0 0 1 0 1 0 0.4 1 21.4 6 0 0 0 0 0.4 1 21.4 6 0 0 0 0 0 0 11 0 0 0 0 1 0 0 1 0 0 1 0 0 x x x x y u x x x x x x x x x x x x & & & & 状态反馈向量 k = [ − 0.4 − 1 − 21.4 − 6 ] 单输入系统,期望极点一旦确定,状态反馈向量 是唯 一的 。 k

其模拟计算机仿真方块图如图6一5 6 图6-5 状态反馈与输出无关,所以上述算法也适用于单输入多输 出系统;单输入系统,期望特征值一旦确定,反馈向量k是 唯一的
∫ ∫ ∫ ∫ u y 1 2 x & 1 x x 2 3 x& x 3 x& 4 x& 4 x −1 0.4 −6 −1 11 21.4 −21.4 + + 6 −0.4 −1 图6-5 其模拟计算机仿真方块图如图6-5 状态反馈与输出无关,所以上述算法也适用于单输入多输 出系统;单输入系统,期望特征值一旦确定,反馈向量 是 唯一的。 k