N(s)G.(s)E(s)C(s)R(s)G(s)Gz(s)H(s)图6-4复合校正串联校正和反馈校正的应用场合、要求和特点串联校正串联校正装置有源参数可调整,运放加RC网络,电动(气动)单元构成的PID调节器。有源有放大器阻抗匹配,接在前向通路能量较低的部位。反馈校正不需要放大器,可消除系统原有部分参数波动对系统性能的影响,在性能指标要求较高的控制系统中,常常兼用串联校正和反馈校正。6.1.4基本控制规律(1)比例(P)控制规律m(t) = Kpe(t)(6-12)提高系统开环增益,减小系统稳态误差,但会降低系统的相对稳定性。172
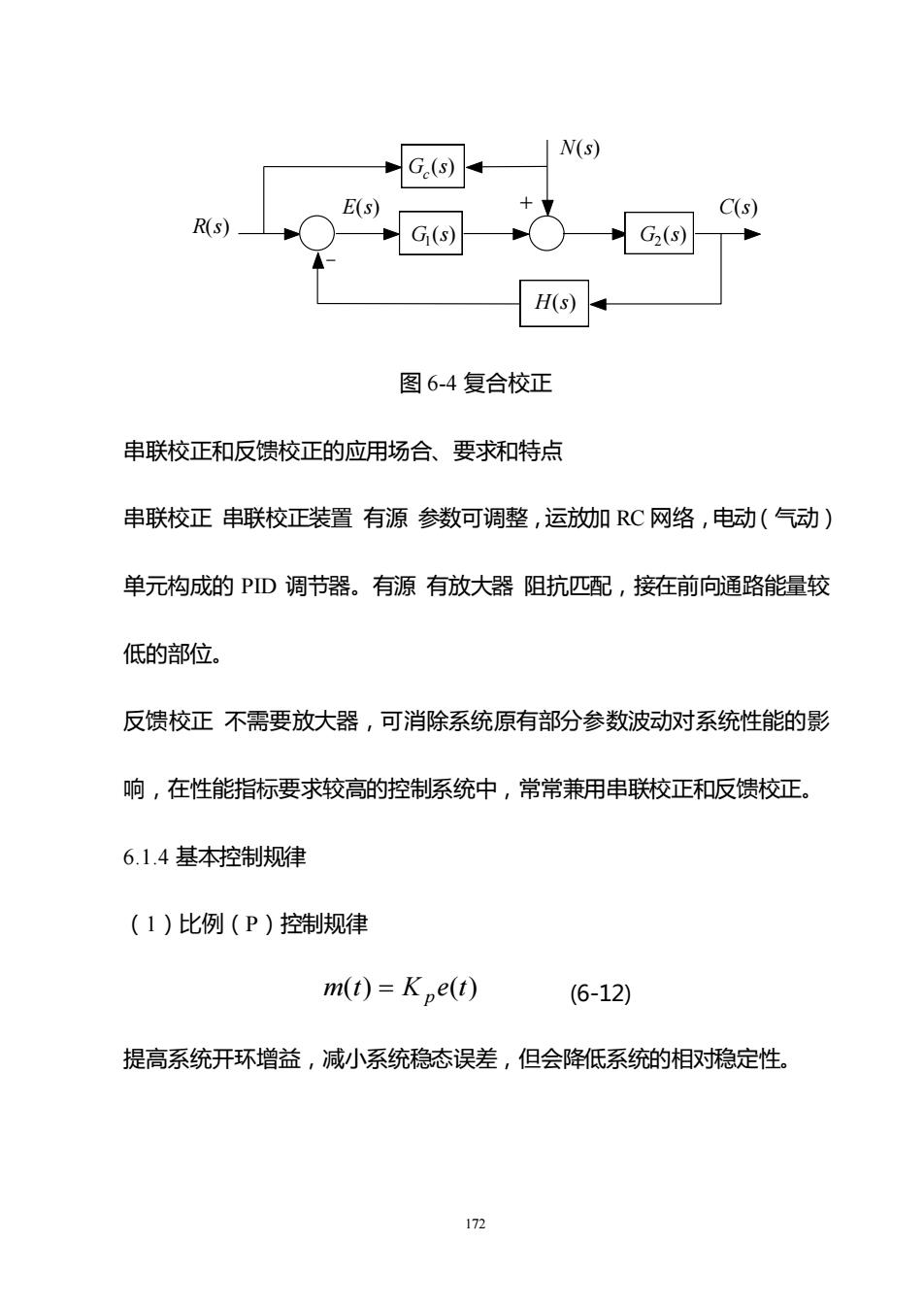
172 R(s) G(s) E(s) ( ) 1 G s G(s()) 2 G s H(s) C(s) N(s) G (s) c + 图 6-4 复合校正 串联校正和反馈校正的应用场合、要求和特点 串联校正 串联校正装置 有源 参数可调整,运放加 RC 网络,电动(气动) 单元构成的 PID 调节器。有源 有放大器 阻抗匹配,接在前向通路能量较 低的部位。 反馈校正 不需要放大器,可消除系统原有部分参数波动对系统性能的影 响,在性能指标要求较高的控制系统中,常常兼用串联校正和反馈校正。 6.1.4 基本控制规律 (1)比例(P)控制规律 m(t) K e(t) = p (6-12) 提高系统开环增益,减小系统稳态误差,但会降低系统的相对稳定性
E(s)M(s)e(t)m(t)R(s)r(t)K,(1+TsKpc(t)C(s)(a)P控制器(b)PD控制器图6-5 PP控制器P控制器和PD控制器(2)比例-微分(PD)控制规律de(t)m(t) = K,e(t)+ Kpt(6-13)dtPD控制规律中的微分控制规律能反映输入信号的变化趋势,产生有效的早期修正信号,以增加系统的阻尼程度,从而改善系统的稳定性。在串联校正时,可使系统增加一个_一的开环零点,使系统的相角裕度提高,因此有助于系统动态性能的改善。单独用微分也很少,对噪声敏感。(3)积分(1)控制规律具有积分(I)控制规律的控制器,称为I控制器m(t) = K 'e(1)dt(6-14)输出信号m(t)与其输入信号的积分成比例。K,为可调比例系数。当e(t)消失后,输出信号m(t)有可能是一个不为零的常量。在串联校正中,采用I控制173
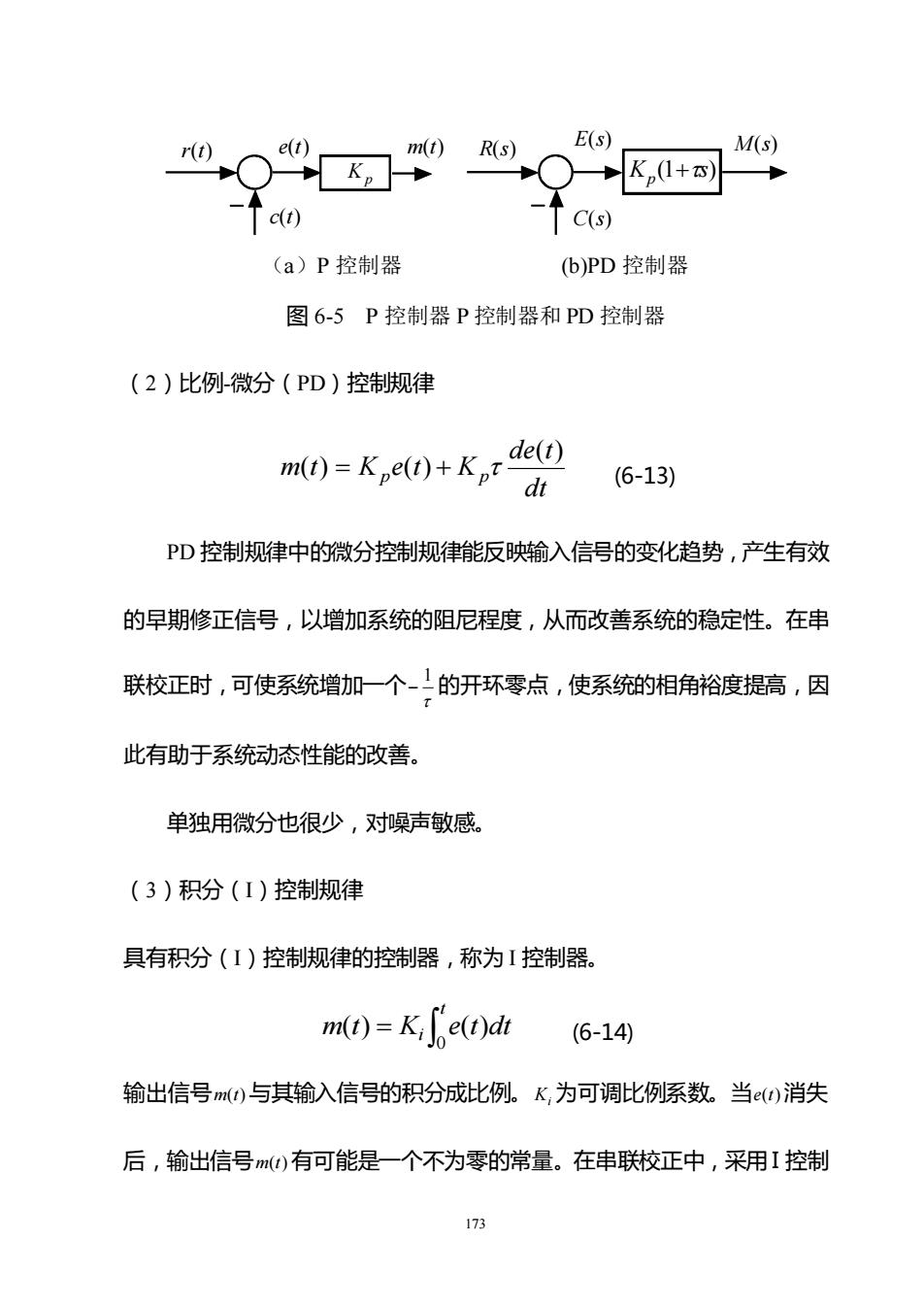
173 - r(t) m(t) c(t) e(t) Kp - R(s) E(s) M(s) C(s) K (1 s) p + (a)P 控制器 (b)PD 控制器 图 6-5 P 控制器 P 控制器和 PD 控制器 (2)比例-微分(PD)控制规律 dt de t m t Kp e t Kp ( ) ( ) = ( ) + (6-13) PD 控制规律中的微分控制规律能反映输入信号的变化趋势,产生有效 的早期修正信号,以增加系统的阻尼程度,从而改善系统的稳定性。在串 联校正时,可使系统增加一个 1 − 的开环零点,使系统的相角裕度提高,因 此有助于系统动态性能的改善。 单独用微分也很少,对噪声敏感。 (3)积分(I)控制规律 具有积分(I)控制规律的控制器,称为 I 控制器。 = t m t Ki e t dt 0 ( ) ( ) (6-14) 输出信号 m(t) 与其输入信号的积分成比例。Ki 为可调比例系数。当 e(t) 消失 后,输出信号 m(t) 有可能是一个不为零的常量。在串联校正中,采用 I 控制
器可以提高系统的型别(无差度),有利提高系统稳态性能,但积分控制增加了一个位于原点的开环极点,使信号产生90°的相角滞后,于系统的稳定不利。不宜采用单一的I控制器。(4)比例-积分(PI)控制规律具有积分比例-积分控制规律的控制器,称为PI控制器,E(s)E(s)M(s)M(s)R(s)R(s)1K,Kp(1+MT,ssC(s)C(s)图6-6积分控制器I和PI控制器Km(t)= K,e(t) +e(t)dt(6-15)输出信号m(t)同时与其输入信号及输入信号的积分成比例。K,为可调比例系数,T为可调积分时间系数。开环极点,提高型别,减小稳态误差。右半平面的开环零点,提高系统的阻尼程度,缓和PI极点对系统产生的不利影响。只要积分时间常数T足够大,PI控制器对系统的不利影响可大为减小。PI控制器主要用来改善控制系统的稳态性能174
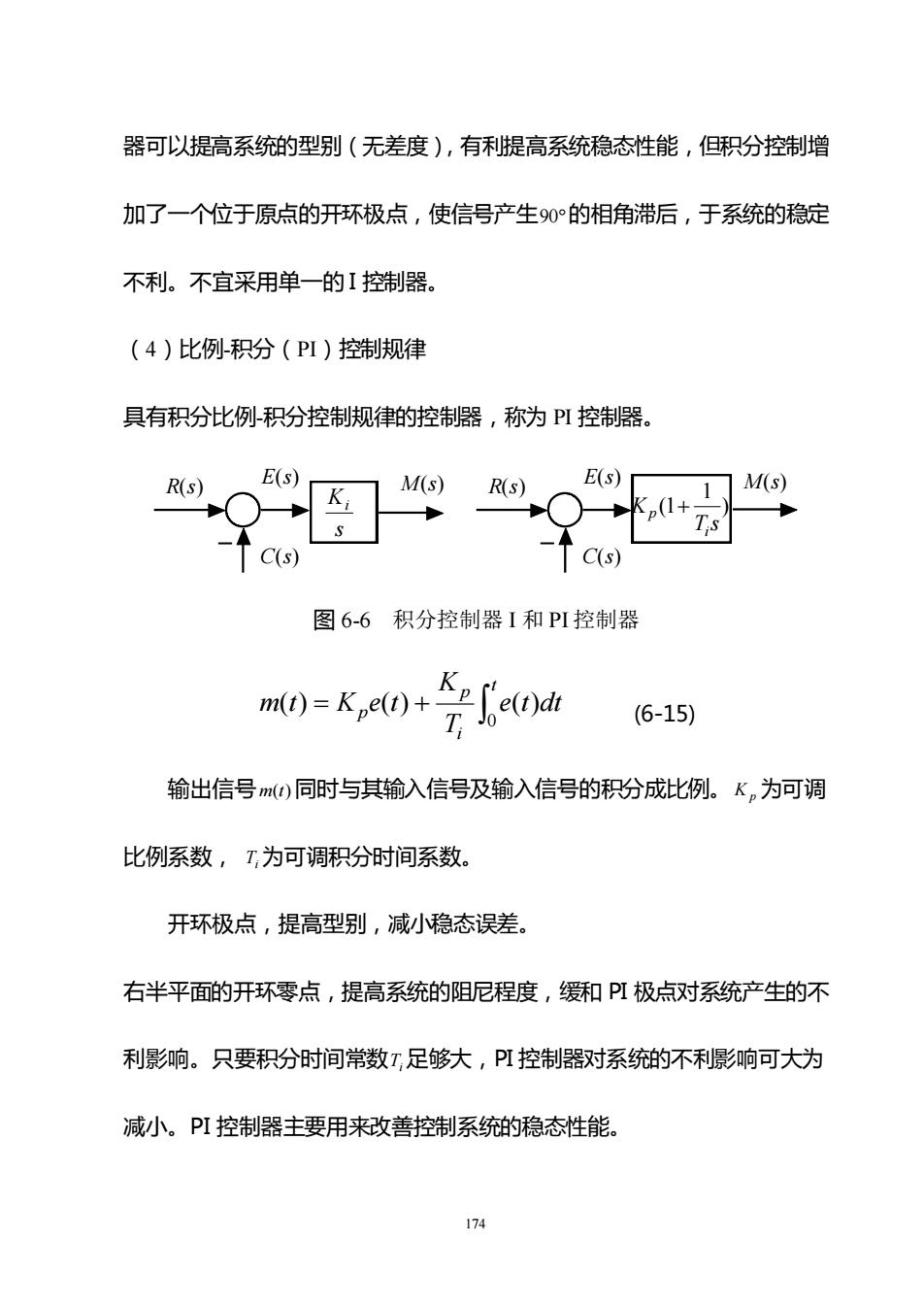
174 器可以提高系统的型别(无差度),有利提高系统稳态性能,但积分控制增 加了一个位于原点的开环极点,使信号产生 90 的相角滞后,于系统的稳定 不利。不宜采用单一的 I 控制器。 (4)比例-积分(PI)控制规律 具有积分比例-积分控制规律的控制器,称为 PI 控制器。 - R(s) E(s) M(s) C(s) s Ki - R(s) E(s) M(s) C(s) ) 1 (1 T s K i p + 图 6-6 积分控制器 I 和 PI 控制器 = + t i p p e t dt T K m t K e t 0 ( ) ( ) ( ) (6-15) 输出信号 m(t) 同时与其输入信号及输入信号的积分成比例。 K p 为可调 比例系数, Ti 为可调积分时间系数。 开环极点,提高型别,减小稳态误差。 右半平面的开环零点,提高系统的阻尼程度,缓和 PI 极点对系统产生的不 利影响。只要积分时间常数 Ti 足够大,PI 控制器对系统的不利影响可大为 减小。PI 控制器主要用来改善控制系统的稳态性能