第二章数字自动增益控制简介 于LNA之后的自动增益环路,增益控制时就要考虑输出噪声功率随增益的调整 而变化的特性。 在 图2-1所示的增益控制控制方案中,Mixer设计了增益模式。LNA与Mixer 级联输出总噪声可表示为: Pn+Pow=NF.G2.KT.B (2.5) 2(PG2 G=GNa·GMer (2.6) Mixer输入功率恒定在最优接管点附近,VGLNA增益GLNA不变,此时NF随GMixer 变化较小,近似认为NF不变;PP3主要取决于Mixer,Mixer设计时可以实现PP3 与GMixer的平方成反比。 Mixr之后主要考虑带内干扰。图2-4给出模拟部分带内信号各分量功率传 输曲线。其中noise floor为LPF和PGA的输出噪声,由于模拟部分输入功率变 化意味着Miⅸer在做增益调整,由Miⅸer输出总噪声对其增益的变化的依赖关系 可以得到,模拟部分总的输出噪声可由图中曲线noise and IM:3表示。图2-4表 明了输入功率在Pop处可以得到最大的SNDR Pout (dBm) IM3 Noise and IM3 noise floor Ptop P (dBm) 图2-4带内信号功率传输特性 2.1.2零中频接受机自动增益控制方案简介 上一小节讨论了自动增益控制设计的基本问题,根据这些基本问题, 图2-1显示了一种零中频接收机自动增益控制的一种实现方法。 首先由于邻道干扰的存在,以及带内信号自身的交调,Miⅸer的线性度在射 频部分是影响SNDR关键的限制因素。因此需要对Mixer的输入功率做自动调整。 此时,设计VGLNA和PWD构成第一个自动增益控制环路,用作保护Mixer。 对于有LPF和PGA构成的低频模拟部分,如果输入信号邻道干扰很强,经过 12
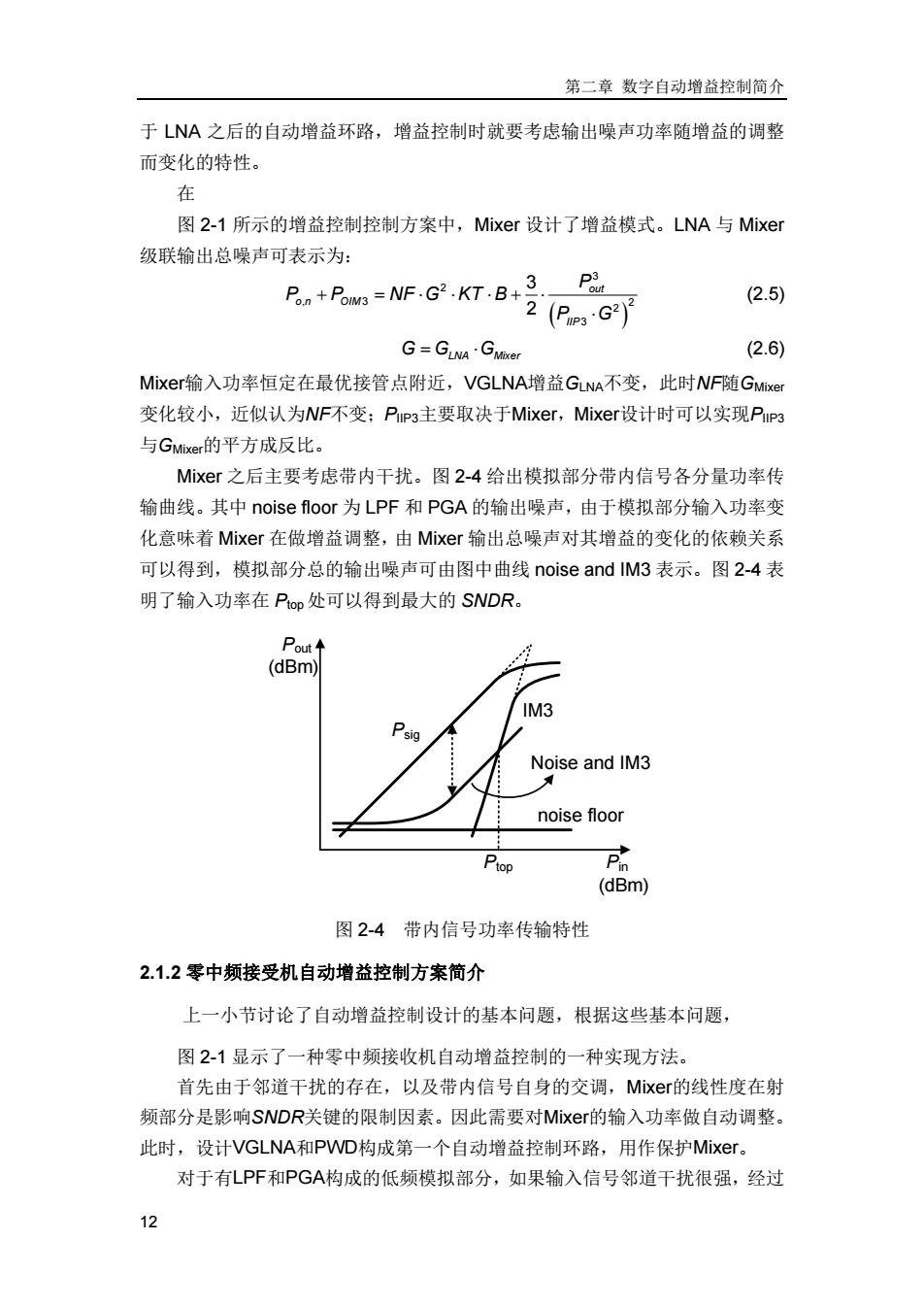
第二章 数字自动增益控制简介 12 于 LNA 之后的自动增益环路,增益控制时就要考虑输出噪声功率随增益的调整 而变化的特性。 在 图 2-1 所示的增益控制控制方案中,Mixer 设计了增益模式。LNA 与 Mixer 级联输出总噪声可表示为: 3 2 , 3 2 2 3 3 2 out o n OIM IIP P P P NF G KT B P G (2.5) GG G LNA Mixer (2.6) Mixer输入功率恒定在最优接管点附近,VGLNA增益GLNA不变,此时NF随GMixer 变化较小,近似认为NF不变;PIIP3主要取决于Mixer,Mixer设计时可以实现PIIP3 与GMixer的平方成反比。 Mixer 之后主要考虑带内干扰。图 2-4 给出模拟部分带内信号各分量功率传 输曲线。其中 noise floor 为 LPF 和 PGA 的输出噪声,由于模拟部分输入功率变 化意味着 Mixer 在做增益调整,由 Mixer 输出总噪声对其增益的变化的依赖关系 可以得到,模拟部分总的输出噪声可由图中曲线 noise and IM3 表示。图 2-4 表 明了输入功率在 Ptop处可以得到最大的 SNDR。 Pout Ptop Pin noise floor IM3 Noise and IM3 Psig (dBm) (dBm) 图 2-4 带内信号功率传输特性 2.1.2 零中频接受机自动增益控制方案简介 上一小节讨论了自动增益控制设计的基本问题,根据这些基本问题, 图 2-1 显示了一种零中频接收机自动增益控制的一种实现方法。 首先由于邻道干扰的存在,以及带内信号自身的交调,Mixer的线性度在射 频部分是影响SNDR关键的限制因素。因此需要对Mixer的输入功率做自动调整。 此时,设计VGLNA和PWD构成第一个自动增益控制环路,用作保护Mixer。 对于有LPF和PGA构成的低频模拟部分,如果输入信号邻道干扰很强,经过

第二章数字自动增益控制简介 Mixr后,输出为频道内的信号,带外干扰得到抑制,输出信号就会很弱。此时 低频模拟部分的噪声会对SWR产生较大影响。因此Mixr需要引入增益模式,并 且合理设计噪声系数、线性度与增益关系。Mixer.与低频RSSl构成第二个增益控 制环路,同时增益调整时不影响Mixer输出的SWDR。这样Mixer)后的RSSl目的主 要是检测邻道干扰很强的情况,通过调整Mix增益模式就可以使得低频模拟部 分输出较高的SWDR。 由于PGA的输出功率要满足ADC的性能要求,所以引入可变增益LPF与 PGA,利用低频RSSI检测PGA输出,实现第三个自动增益控制环路。增益调 整过程分两步,首先调整LPF,以较大增益步长变化,然后调整PGA,以较小 增益步长变化。最后输出ADC要求的功率大小。PGA的整个增益范围应略大于 LPF的增益步长。 增益调整过程快慢取决于功率检测电路对功率变化的响应时间。由于输入信 号存在均峰比问题,检测电路的响应时间与输出纹波大小需要折中。根据不同环 路的调整的精度要求,做出合理的设计方案。PGA的输出要求输出纹波很小, 在增益调整的最后利用数字算法依次添加不同大小的片外电容,实现稳定功率检 测电路的输出,也就是稳定增益调整过程。 整个增益控制过程从第一个环路到第三个环路依次调整,最后每个环路达到 设定的目标功率。 2.2自动增益控制算法实现 全数字自动增益控制算法可以有直接计算目标功率所需增益以及反馈环路 搜索两种方案[7]。直接计算增益有两种情况,其一,检测可变增益模块输入功率: 其二,检测可变增益模块输出功率。两种情形均可得到所需增益。此时增益调整 速度快,要求功率检测电路与信号的动态范围大小一致,并且对模块增益的设计 也提出较高要求,设计难度较大。而在反馈环路搜索法中,需要检测可变增益模 块输出功率,然后二分法或单步调整增益逐步逼近目标功率。此种算法调整增益 根据输出功率是否达到设定的目标功率,因此不需要功率检测电路有较大动态范 围,只需准确知道输出功率即可,设计相对简单,但是调整的时间较长。本文结 合反馈环路搜索法的作相关设计。 数字自动增益控制[]中,可变增益模块增益是离散的,这样输出功率只能以 增益台阶的方式变化。最小增益步长定义为锁定区间,它给出了增益控制后输出 功率偏移目标功率的最大可能值。锁定区间大小是数字增益控制固有的系统误 差。在搜索算法中,算法终止的标志是输出功率进入了人为设定的包含目标功率 的区间中,此区间称为目标区间。为保证输出功率能进入目标区间,目标区间应 设置为大于锁定区间。功率检测电路输出纹波及精度的设计要参考锁定区间和目 13
第二章 数字自动增益控制简介 13 Mixer后,输出为频道内的信号,带外干扰得到抑制,输出信号就会很弱。此时 低频模拟部分的噪声会对SNR产生较大影响。因此Mixer需要引入增益模式,并 且合理设计噪声系数、线性度与增益关系。Mixer与低频RSSI构成第二个增益控 制环路,同时增益调整时不影响Mixer输出的SNDR。这样Mixer后的RSSI目的主 要是检测邻道干扰很强的情况,通过调整Mixer增益模式就可以使得低频模拟部 分输出较高的SNDR。 由于 PGA 的输出功率要满足 ADC 的性能要求,所以引入可变增益 LPF 与 PGA,利用低频 RSSI 检测 PGA 输出,实现第三个自动增益控制环路。增益调 整过程分两步,首先调整 LPF,以较大增益步长变化,然后调整 PGA,以较小 增益步长变化。最后输出 ADC 要求的功率大小。PGA 的整个增益范围应略大于 LPF 的增益步长。 增益调整过程快慢取决于功率检测电路对功率变化的响应时间。由于输入信 号存在均峰比问题,检测电路的响应时间与输出纹波大小需要折中。根据不同环 路的调整的精度要求,做出合理的设计方案。PGA 的输出要求输出纹波很小, 在增益调整的最后利用数字算法依次添加不同大小的片外电容,实现稳定功率检 测电路的输出,也就是稳定增益调整过程。 整个增益控制过程从第一个环路到第三个环路依次调整,最后每个环路达到 设定的目标功率。 2.2 自动增益控制算法实现 全数字自动增益控制算法可以有直接计算目标功率所需增益以及反馈环路 搜索两种方案[7]。直接计算增益有两种情况,其一,检测可变增益模块输入功率; 其二,检测可变增益模块输出功率。两种情形均可得到所需增益。此时增益调整 速度快,要求功率检测电路与信号的动态范围大小一致,并且对模块增益的设计 也提出较高要求,设计难度较大。而在反馈环路搜索法中,需要检测可变增益模 块输出功率,然后二分法或单步调整增益逐步逼近目标功率。此种算法调整增益 根据输出功率是否达到设定的目标功率,因此不需要功率检测电路有较大动态范 围,只需准确知道输出功率即可,设计相对简单,但是调整的时间较长。本文结 合反馈环路搜索法的作相关设计。 数字自动增益控制[7]中,可变增益模块增益是离散的,这样输出功率只能以 增益台阶的方式变化。最小增益步长定义为锁定区间,它给出了增益控制后输出 功率偏移目标功率的最大可能值。锁定区间大小是数字增益控制固有的系统误 差。在搜索算法中,算法终止的标志是输出功率进入了人为设定的包含目标功率 的区间中,此区间称为目标区间。为保证输出功率能进入目标区间,目标区间应 设置为大于锁定区间。功率检测电路输出纹波及精度的设计要参考锁定区间和目
第二章数字自动增益控制简介 标区间合理给定。 增益控制数字算法的实现根据功率检测电路给出的电压信号给出控制编码。 这一过程涉及到如何判断电压信号代表的输入功率值。最简单的方法是,功率检 测电路输入信号功率与输出电压成线性关系,那么寄存器中只需记录一个参考点 和斜率就可以通过计算给出电压与输入功率的对应关系。但数字自动增益控制也 不必限制输入输出为线性,本文中PWD电路就是非线性的,算法设计时,采用 查表法找到输入输出对应关系。 在实际设计中考虑到功耗、面积、带宽、精度等问题时,完全采用模拟的设 计方法会存在较大难度。如果能适宜利用数字控制功率检测电路,通过对算法增 加一些复杂度,降低完全模拟设计的难度。在本文设计中考虑到算法的可实现性, 功率检测电路加入数字逻辑控制增益单元,最终得到输入输出曲线为折线。电路 在功耗、面积、带宽、精度等方面有较好的性能,大大降低了设计的复杂度。 2.3功率检测电路性能指标 功率检测电路的传输曲线为输入功率与输出电压的关系曲线如图2-5所示, 称其为VP曲线。结合此图,给出功率检测电路的性能指标。 Vout slop Vret Pmin Pret Pmax (dBm) 图2-5功率检测电路传输特性曲线 非线性误差:电路设计实现时,VP曲线在功率较大或较小时均会出现饱和 特性,另外曲线本身仅是对线性函数的近似。如果增益控制算法依据线性VP曲 线给出,曲线的非线性就需要量化。非线性误差定义为给定输出电压,实际VP 曲线偏移理想线性VP的量。理想VP曲线过实际曲线的参考点,斜率为此点的 导数。 偏移量:电路实现时,工艺、温度、电源等条件的变化以及器件失配均会使 得VP曲线发生移动,往往表现为平移,此时用参考功率点的偏移量来表征。偏 移量定义为给定输出参考电压,输入功率对理想输入功率的差值。如图2-5所示, 参数δ即为定义的偏移量。 非线性误差和曲线偏移量共同构成了功率检测电路的精度量化参数。如果自 14
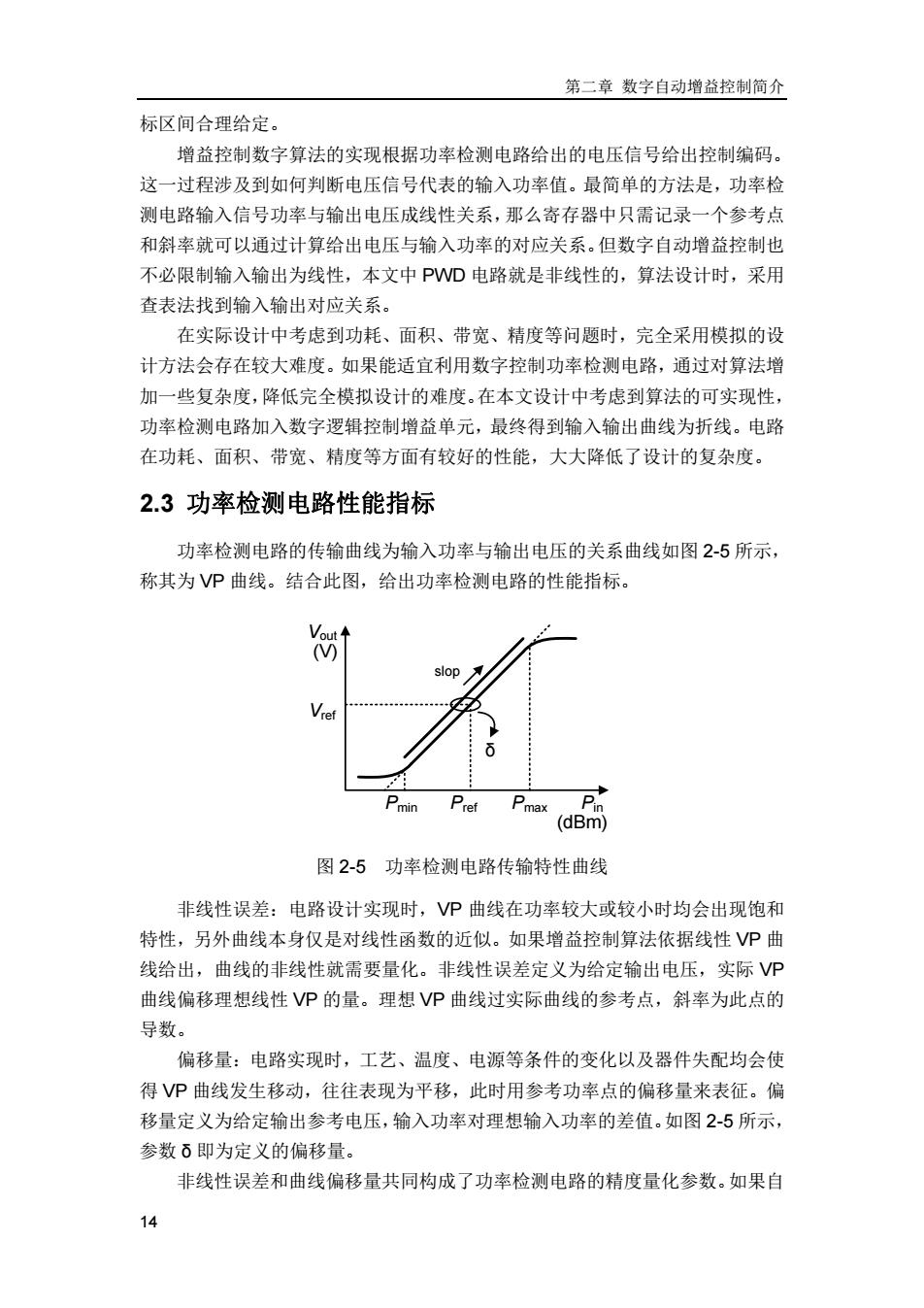
第二章 数字自动增益控制简介 14 标区间合理给定。 增益控制数字算法的实现根据功率检测电路给出的电压信号给出控制编码。 这一过程涉及到如何判断电压信号代表的输入功率值。最简单的方法是,功率检 测电路输入信号功率与输出电压成线性关系,那么寄存器中只需记录一个参考点 和斜率就可以通过计算给出电压与输入功率的对应关系。但数字自动增益控制也 不必限制输入输出为线性,本文中 PWD 电路就是非线性的,算法设计时,采用 查表法找到输入输出对应关系。 在实际设计中考虑到功耗、面积、带宽、精度等问题时,完全采用模拟的设 计方法会存在较大难度。如果能适宜利用数字控制功率检测电路,通过对算法增 加一些复杂度,降低完全模拟设计的难度。在本文设计中考虑到算法的可实现性, 功率检测电路加入数字逻辑控制增益单元,最终得到输入输出曲线为折线。电路 在功耗、面积、带宽、精度等方面有较好的性能,大大降低了设计的复杂度。 2.3 功率检测电路性能指标 功率检测电路的传输曲线为输入功率与输出电压的关系曲线如图 2-5 所示, 称其为 VP 曲线。结合此图,给出功率检测电路的性能指标。 Pin Vout (dBm) slop (V) Pref Vref δ Pmin Pmax 图 2-5 功率检测电路传输特性曲线 非线性误差:电路设计实现时,VP 曲线在功率较大或较小时均会出现饱和 特性,另外曲线本身仅是对线性函数的近似。如果增益控制算法依据线性 VP 曲 线给出,曲线的非线性就需要量化。非线性误差定义为给定输出电压,实际 VP 曲线偏移理想线性 VP 的量。理想 VP 曲线过实际曲线的参考点,斜率为此点的 导数。 偏移量:电路实现时,工艺、温度、电源等条件的变化以及器件失配均会使 得 VP 曲线发生移动,往往表现为平移,此时用参考功率点的偏移量来表征。偏 移量定义为给定输出参考电压,输入功率对理想输入功率的差值。如图 2-5 所示, 参数 δ 即为定义的偏移量。 非线性误差和曲线偏移量共同构成了功率检测电路的精度量化参数。如果自
第二章数字自动增益控制简介 动增益控制算法没有采用基于线性VP曲线的算法,就不需考虑非线性误差。比 如本文设计的PWD电路就没有考虑非线性误差。RSS电路需要同时考虑以上 两个精度参数。 带宽:利用正弦波作为输入信号,VP曲线随频率变化对理想曲线发生平移。 参考点功率的偏移量即为带宽的限制。图2-5中的δ也可以表征频率对输出曲线 的影响。 输入动态范围:如果算法要求VP曲线为线性关系,实际曲线在功率较大时 发生饱和,最大输入功率定义为,随着输出电压变化,实际输入功率由于曲线饱 和,对理想输入功率开始偏移一定量时的值。最小输入功率可做类似的定义。 建立时间:功率检测电路采用RC滤波得到直流电压来表征输入功率大小。 这时输入功率变化,直流输出会有延时。建立时间定义为输入功率切换输出电压 距离理想输出直流电压小于一定量时(根据电压偏差转换为功率偏差取值)最小 时间。 15
第二章 数字自动增益控制简介 15 动增益控制算法没有采用基于线性 VP 曲线的算法,就不需考虑非线性误差。比 如本文设计的 PWD 电路就没有考虑非线性误差。RSSI 电路需要同时考虑以上 两个精度参数。 带宽:利用正弦波作为输入信号,VP 曲线随频率变化对理想曲线发生平移。 参考点功率的偏移量即为带宽的限制。图 2-5 中的 δ 也可以表征频率对输出曲线 的影响。 输入动态范围:如果算法要求 VP 曲线为线性关系,实际曲线在功率较大时 发生饱和,最大输入功率定义为,随着输出电压变化,实际输入功率由于曲线饱 和,对理想输入功率开始偏移一定量时的值。最小输入功率可做类似的定义。 建立时间:功率检测电路采用 RC 滤波得到直流电压来表征输入功率大小。 这时输入功率变化,直流输出会有延时。建立时间定义为输入功率切换输出电压 距离理想输出直流电压小于一定量时(根据电压偏差转换为功率偏差取值)最小 时间

第三章接受信号强度指示电路设计 第三章接受信号强度指示电路设计 本章介绍低频接受信号强度指示电路(RSS)设计。给出连续检测结构的系统 分析和各个子电路模块的设计。主要分析探讨了放大器,整流器在不同PVT条 件和器件失配等因素影响下的传输特性的偏差。据此作相应的补偿和优化,使得 RSSI得到足够的精度[9]。另外不同形式的输入信号在相同平方功率下连续检测 结构会得到不同的响应电平,本章比较了正弦波和双音信号的输出响应。最后给 出RSSI相关设计仿真结果。 3.1连续检测结构分析 在第一章中图1-2给出连续检测结构的系统框图,考虑到工艺,温度的变化 以及增益控制需要,本章设计给出了补偿电路,直流消除电路,前置数字控制衰 减器。图3-1给出本章设计的完整结构框图。其中lcos用来补偿整流器偏差。 DCOC S3 Attenuator 应 rectifier rectifier rectifier rectifier lout F(S)》 /dcos 图3-1接受信号强度指示电路框图 在很多文献中对连续检测结构如何实现输入输出半对数线性做了系统分析 [4[10],并给出最大非线性误差公式。基本思路可以陈述如下: 1.连续检测结构输出由N个整流器输出电流相加得到,可以看作N条独立的 信号传输路径输出相加,放大器做复用。 2.传输特性线性近似。图3-1中,无论是放大器还是整流器在输入信号较大时 输出均会被限幅。将两者的限幅特性等效到放大器,在图3-1中,放大器替换为 16
第三章 接受信号强度指示电路设计 16 第三章 接受信号强度指示电路设计 本章介绍低频接受信号强度指示电路(RSSI)设计。给出连续检测结构的系统 分析和各个子电路模块的设计。主要分析探讨了放大器,整流器在不同 PVT 条 件和器件失配等因素影响下的传输特性的偏差。据此作相应的补偿和优化,使得 RSSI 得到足够的精度[9]。另外不同形式的输入信号在相同平方功率下连续检测 结构会得到不同的响应电平,本章比较了正弦波和双音信号的输出响应。最后给 出 RSSI 相关设计仿真结果。 3.1 连续检测结构分析 在第一章中图 1-2 给出连续检测结构的系统框图,考虑到工艺,温度的变化 以及增益控制需要,本章设计给出了补偿电路,直流消除电路,前置数字控制衰 减器。图 3-1 给出本章设计的完整结构框图。其中 Idcos 用来补偿整流器偏差。 图 3-1 接受信号强度指示电路框图 在很多文献中对连续检测结构如何实现输入输出半对数线性做了系统分析 [4][10],并给出最大非线性误差公式。基本思路可以陈述如下: 1. 连续检测结构输出由 N 个整流器输出电流相加得到,可以看作 N 条独立的 信号传输路径输出相加,放大器做复用。 2. 传输特性线性近似。图 3-1 中,无论是放大器还是整流器在输入信号较大时 输出均会被限幅。将两者的限幅特性等效到放大器,在图 3-1 中,放大器替换为