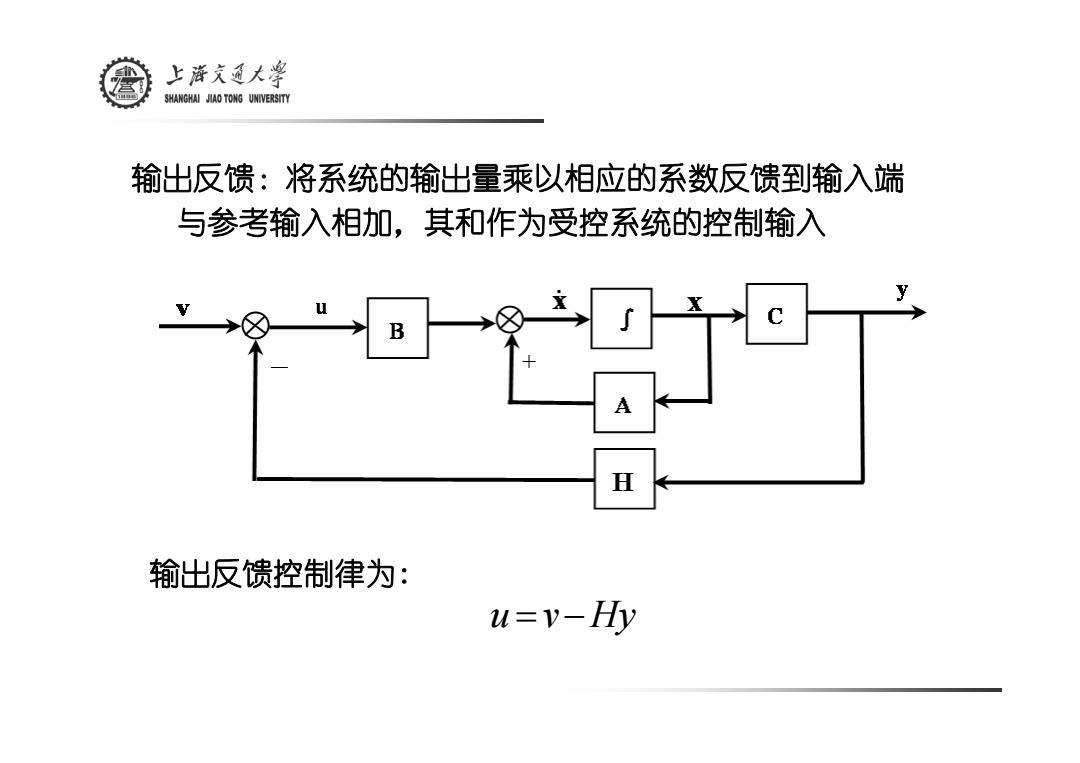
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY 输出反馈:将系统的输出量乘以相应的系数反馈到输入端 与参考输入相加,其和作为受控系统的控制输入 B 输出反馈控制律为: u=v-Hy
输出反馈:将系统的输出量乘以相应的系数反馈到输入端 与参考输入相加,其和作为受控系统的控制输入 u = v −Hy 输出反馈控制律为:
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY 输出反馈是特殊的状态反馈 当HC=时,输出反馈等同于全状态反馈 输出反馈系统的状态空间表达式为: =Ax+Bu Ax+B(y-Hy) =Ax+By-BHCx=(A-BHCx+Bv y=Cx 对应的传递函数矩阵为: G(s)=C(sI-A+BHC)B
输出反馈系统的状态空间表达式为 : = Ax + Bv − BHCx = ( ) A − BHC x + Bv x& = Ax + Bu = Ax + B ( v − Hy ) y = Cx 输出反馈是特殊的状态反馈 当 HC=K时,输出反馈等同于全状态反馈 对应的传递函数矩阵为: G s C sI A BHC B 1 ( ) ( ) − = − +
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY 例6.2.1试给出引入状态反馈K=[10]后闭环系统的状态 空间模型 X二 8®水 解:引入状态反馈:u=v-Kx 则 =(A-BK)x+Bv y=Cx 4a账i0-b-Bd
例6.2.1 试给出引入状态反馈 后闭环系统的状态 空间模型 x x u y [ ] 0 1 x 1 0 1 0 . 0 1 = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = K =[ ] 1 0 解: 引入状态反馈: u = v − Kx ⎩ ⎨ ⎧ = = − + y Cx x& ( A BK ) x Bv 则 [ ] ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ =⎥ ⎦ ⎤ ⎢ ⎣ ⎡ −⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = 0 0 0 1 0 1 0 1 1 0 0 1 A BK
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY 作业5试分析引入状态反馈K=[10]前后系统的能控性和 能观性 8d小-p水
作业5 试分析引入状态反馈 前后系统的能控性和 能观性 x x u y [ ] 0 1 x 1 0 1 0 . 0 1 = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = K = [ 1 0 ]
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY 6.3极点配置问题 系统性能:稳态性能和动态性能 稳态性能:稳定性、静态误差 ·动态性能:调节时间、响应速度.. 影响系统稳定性、动态性能的因素: ·极点位置(系统矩阵的特征值) 通过反馈控制器的设计,可使得闭环系统的极点 位于预先给定的期望位置
系统性能:稳态性能和动态性能 • 稳态性能:稳定性、静态误差 • 动态性能:调节时间、响应速度... 影响系统稳定性、动态性能的因素: • 极点位置(系统矩阵的特征值) 通过反馈控制器的设计,可使得闭环系统的极点 位于预先给定的期望位置。 6.3 极点配置问题