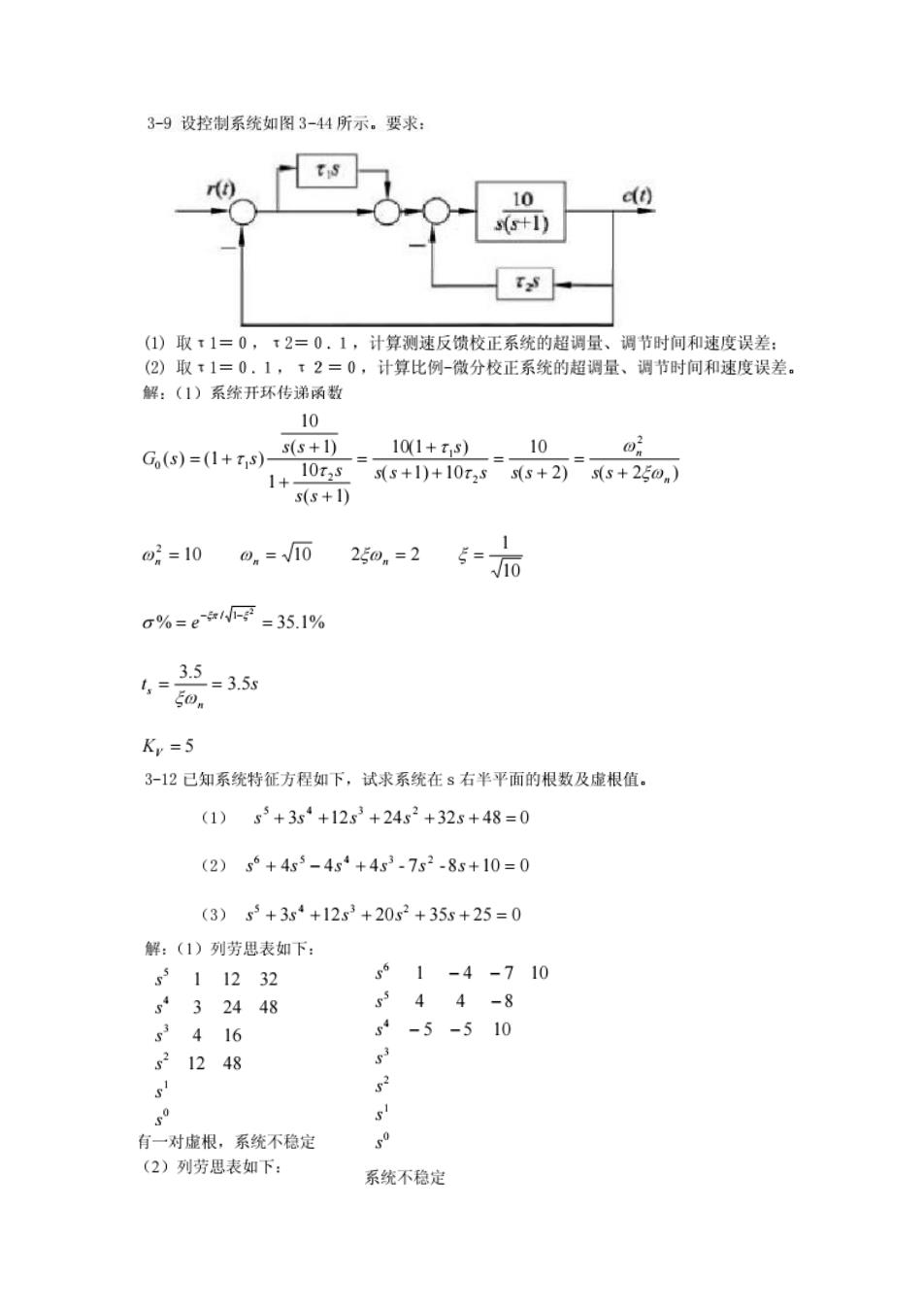
3-9设控制系统如图3-44所示。要求:rt)c(o)10s(s+1)(1)取1=0,t2=0.1,计算测速反馈校正系统的超调量、调节时间和速度误差:(2)取t1=01,T2=0,计算比例-微分校正系统的超调量、调节时间和速度误差。解:(1)系统开环传递函数10on10s(s + 1)10(1+ t,s)G(s) =(1 + t,s)10t,ss(s+1)+10t,ss(s + 2)S(s+250.)1+s(s + 1)1O,=/100=10250,=25=J100% = e-/- =35.1%3.5 = 3.5st,=EO.Kv =53-12已知系统特征方程如下,试求系统在s右半平面的根数及虚根值。s+3s+12s+24s2+32s+48=0(1)56+4s54s4+453-7s2-85+10=0(2)5s+3s4+1253+205+35s+25=0(3)解:(1)列劳思表如下:5613-4-71011232ss44-8543244854-5-510534165352124852S'si5oso有一对虚根,系统不稳定(2)列劳思表如下:系统不稳定
(3)列劳思表如下:5s1123554320251680s3352525st105o25有一对虚根,系统不稳定3-13已知单位反馈系统的开环传递函数K(0.5s +1)G(s) =s(s +1)(0.5s2 +$+1)试确定系统稳定时的K值范围。解:系统特征方程为s(s +1)(0.5s2 + s+1)+ K(0.5s +1) =0将上述方程化简得到:0.5s*+1.5s*+2s2+(1+0.5K)s+K=0劳思表如下:540.52K531.51+0.5K2.5-0.25Ks2K1.52.5-1.25K-0.125K2s2.50.25KsoK3-15已知单位反馈系统的开环传递函数100(1)G(s)=(0. Is + 1)(s + 5)50(2)G(s)= -s(0.1s + D(s + 5)10(2s +1)(3)G(s)=s(s2+6s+100)