输入输出关系 山东程子大军 在理想情况下,U,和U。之间呈线性关系: Ua=K U (2-1) GT 式中,U 平均整流电压, U。控制电压, K,一晶闸管整流器放大系数。 电气与电子工程学院自动化系
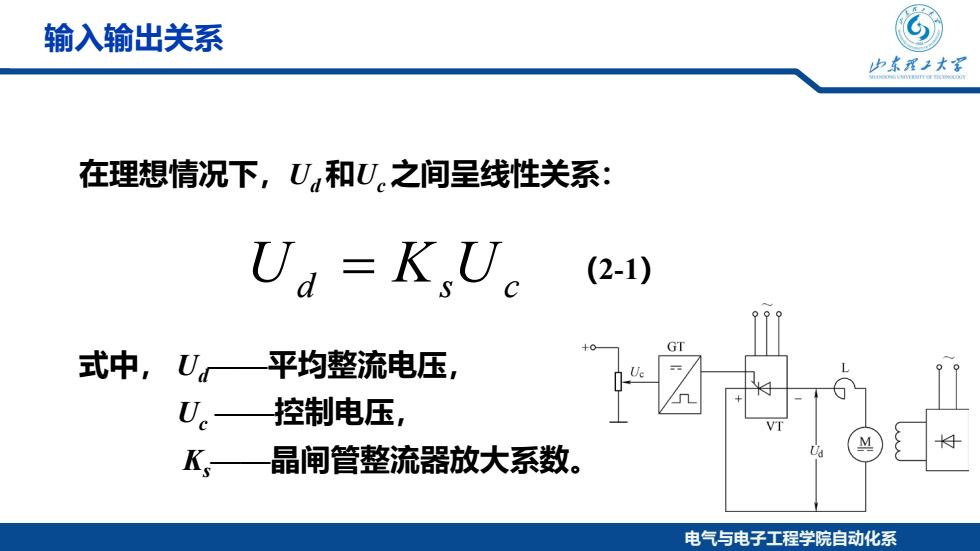
电气与电子工程学院自动化系 电气与电子工程学院自动化系 输入输出关系 在理想情况下,Ud 和Uc 之间呈线性关系: (2-1) 式中, Ud——平均整流电压, Uc ——控制电压, Ks——晶闸管整流器放大系数。 Ud = Ks Uc
1.2.1触发脉冲相位控制 山东程子大军 U=KU 调节控制电压U: 口移动触发装置GT输出脉冲的相位, 改变可控整流器VT输出瞬时电压u,的波形,以及输出 平均电压U的数值。 电气与电子工程学院自动化系
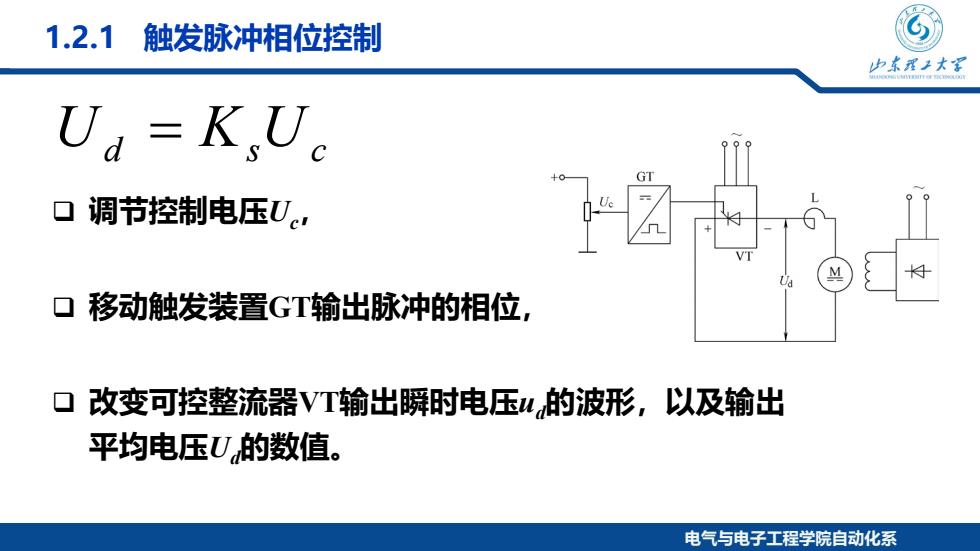
电气与电子工程学院自动化系 电气与电子工程学院自动化系 1.2.1 触发脉冲相位控制 调节控制电压Uc, 移动触发装置GT输出脉冲的相位, 改变可控整流器VT输出瞬时电压ud的波形,以及输出 平均电压Ud的数值。 Ud = Ks Uc
等效电路分析 山东程上大家 如果把整流装置内阻移 到装置外边,看成是其负载 电路电阻的一部分,那么, 整流电压便可以用其理想空 载瞬时值Wao和平均值Uao 来表示,相当于用图示的等 效电路代替实际的整流电路。 图2-2VM系统主电路的等效电路图 电气与电子工程学院自动化系
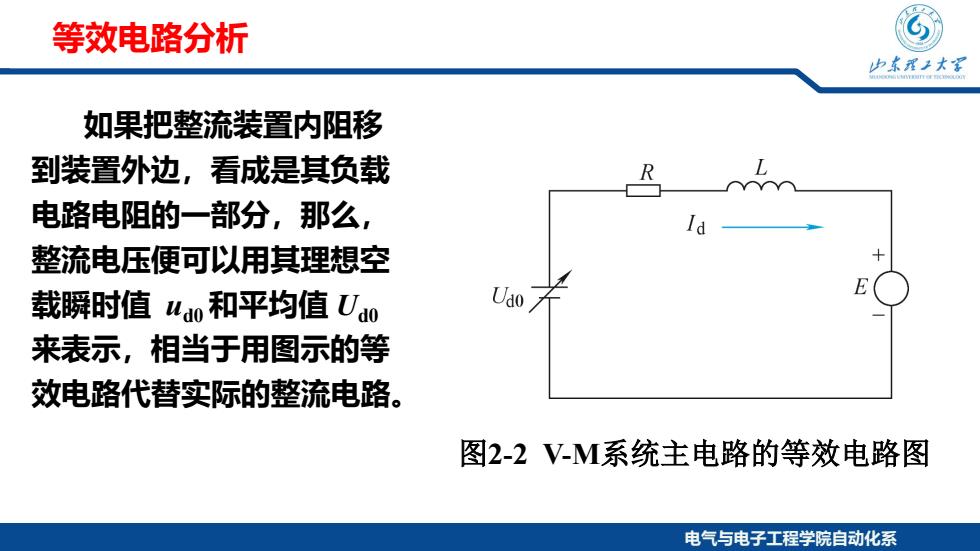
电气与电子工程学院自动化系 电气与电子工程学院自动化系 等效电路分析 如果把整流装置内阻移 到装置外边,看成是其负载 电路电阻的一部分,那么, 整流电压便可以用其理想空 载瞬时值 ud0 和平均值 Ud0 来表示,相当于用图示的等 效电路代替实际的整流电路。 图2-2 V-M系统主电路的等效电路图
瞬时电压平衡方程 山东程子大军 udo E+igR+L dia dt (2-2) 式中 E 电动机反电动势(); 一整流电流瞬时值(A); L 主电路总电感(田; R 主电路总电阻(2),; 电气与电子工程学院自动化系
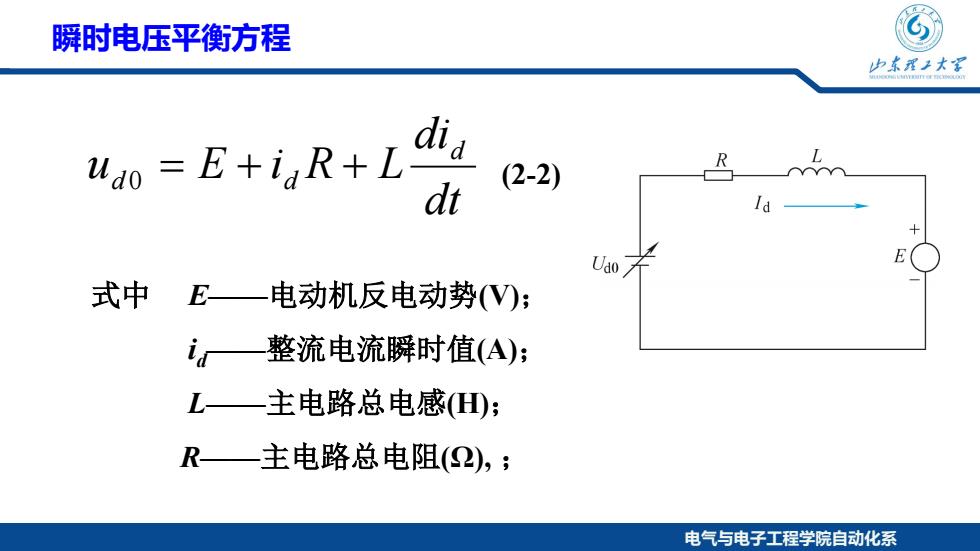
电气与电子工程学院自动化系 电气与电子工程学院自动化系 瞬时电压平衡方程 dt di u E i R L d d 0 = + d + (2-2) 式中 E——电动机反电动势(V); id——整流电流瞬时值(A); L——主电路总电感(H); R——主电路总电阻(Ω), ;
触发脉冲相位控制 山东程子大军 udo E+iR+L dt 口对uo进行积分,即得理想空载整流电压平均值Uo。 ▣ 用触发脉冲的相位角α控制整流电压的平均值U是晶闸管整流器 的特点。 ▣ U,与触发脉冲相位角α的关系因整流电路的形式而异,对于一般 的全控整流电路,当电流波形连续时,U=f(a侧,可用下式表示 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 触发脉冲相位控制 对ud0进行积分,即得理想空载整流电压平均值Ud0 。 用触发脉冲的相位角α 控制整流电压的平均值Ud0是晶闸管整流器 的特点。 Ud0与触发脉冲相位角 α 的关系因整流电路的形式而异,对于一般 的全控整流电路,当电流波形连续时,Ud0 = f (α) 可用下式表示 dt di u E i R L d d 0 = + d +