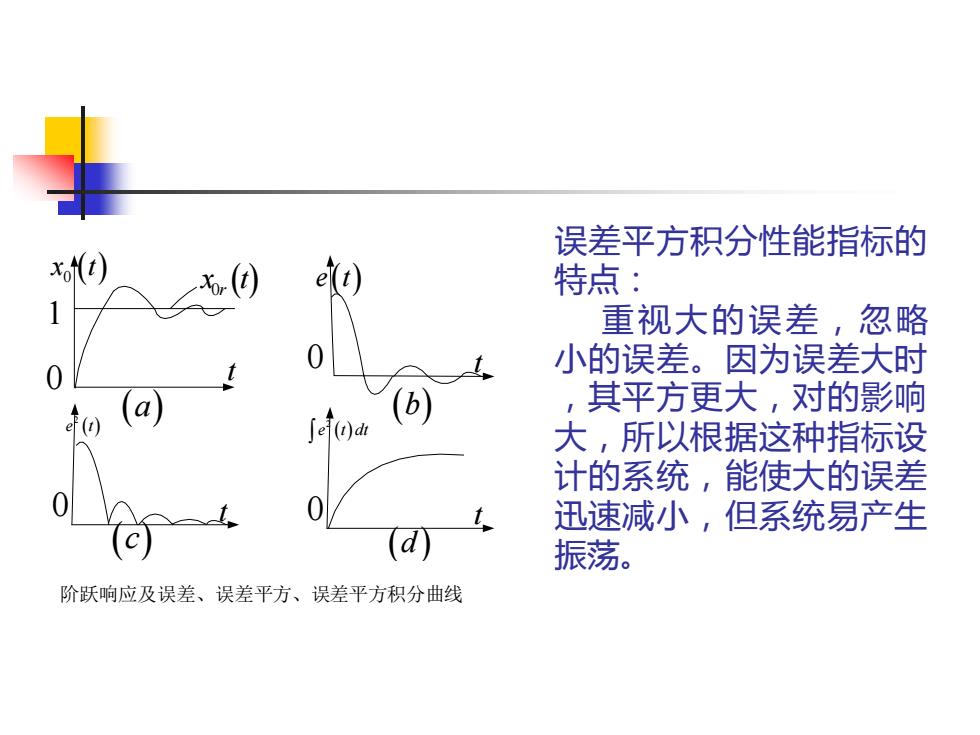
误差平方积分性能指标的 of(t) (t 特点: 重视大的误差,忽略 小的误差。因为误差大时 (b 其平方更大,对的影响 f() 大,所以根据这种指标设 计的系统,能使大的误差 迅速减小,但系统易产生 d 振荡。 阶跃响应及误差、误差平方、误差平方积分曲线
x t 0r ( ) x t 0 ( ) t 0 0 t e t( ) 1 0 t ( ) 2 e t 0 t ( ) 2 e t dt (a) (b) (c) (d ) 阶跃响应及误差、误差平方、误差平方积分曲线 误差平方积分性能指标的 特点: 重视大的误差,忽略 小的误差。因为误差大时 ,其平方更大,对的影响 大,所以根据这种指标设 计的系统,能使大的误差 迅速减小,但系统易产生 振荡
3、广义误差平方积分性能指标 取: 1-5()ae()d →给定的加权系数 所以最优系统就是使此性能指标取极小的系统 此指标的特点是既不允许大的动态误差的期存在,又不 允许大的误差变化率期存在。 所以按此准则设计的系统,不仅过渡过程结束得快,且过 渡过程的变化也较平稳
3、广义误差平方积分性能指标 ( ) ( ) ' 2 2 0 I e t e t dt = + 给定的加权系数 所以最优系统就是使此性能指标取极小的系统 此指标的特点是既不允许大的动态误差 长期存在,又不 允许大的误差变化率 长期存在。 所以按此准则设计的系统,不仅过渡过程结束得快,且过 渡过程的变化也较平稳。 取: → e t( ) ( ) ' e t
§6.2系统的校正 性能指标通常是由控制系统的用户提出。一个具体 系统对指标的要求应有所侧重,如调速系统对平稳性和 稳态精度要求严格,而随动系统对快速性期望很高。 性能指标的提出要有根据,不能脱离实际的可能性, 比如要求响应快,则必须有足够好的能量供给系统和能 量转化系统,以保证运动部件具有较好的加速度,运动 部件要能承受产生的离心载荷和惯性载荷等。性能指标 决定于系统的设计水平和工艺水平。此外,由于它的性 能指标常需要昂贵的元件,因此成本高
§6.2 系统的校正 性能指标通常是由控制系统的用户提出。一个具体 系统对指标的要求应有所侧重,如调速系统对平稳性和 稳态精度要求严格,而随动系统对快速性期望很高。 性能指标的提出要有根据,不能脱离实际的可能性, 比如要求响应快,则必须有足够好的能量供给系统和能 量转化系统,以保证运动部件具有较好的加速度,运动 部件要能承受产生的离心载荷和惯性载荷等。性能指标 决定于系统的设计水平和工艺水平。此外,由于它的性 能指标常需要昂贵的元件,因此成本高
另一方面,几个性能指标的要求也经常互相矛盾。例 如,减小系统的稳态误差往往会降低系统的相对稳定性, 甚至导致系统不稳定。在这种情况下,就要考虑哪个性能 时主要的,首先加以满足;有时,在另一些情况下就要采 取折中的方案,并加上必要的校正,使两方面的性能都能 得到部分满足
另一方面,几个性能指标的要求也经常互相矛盾。例 如,减小系统的稳态误差往往会降低系统的相对稳定性, 甚至导致系统不稳定。在这种情况下,就要考虑哪个性能 时主要的,首先加以满足;有时,在另一些情况下就要采 取折中的方案,并加上必要的校正,使两方面的性能都能 得到部分满足
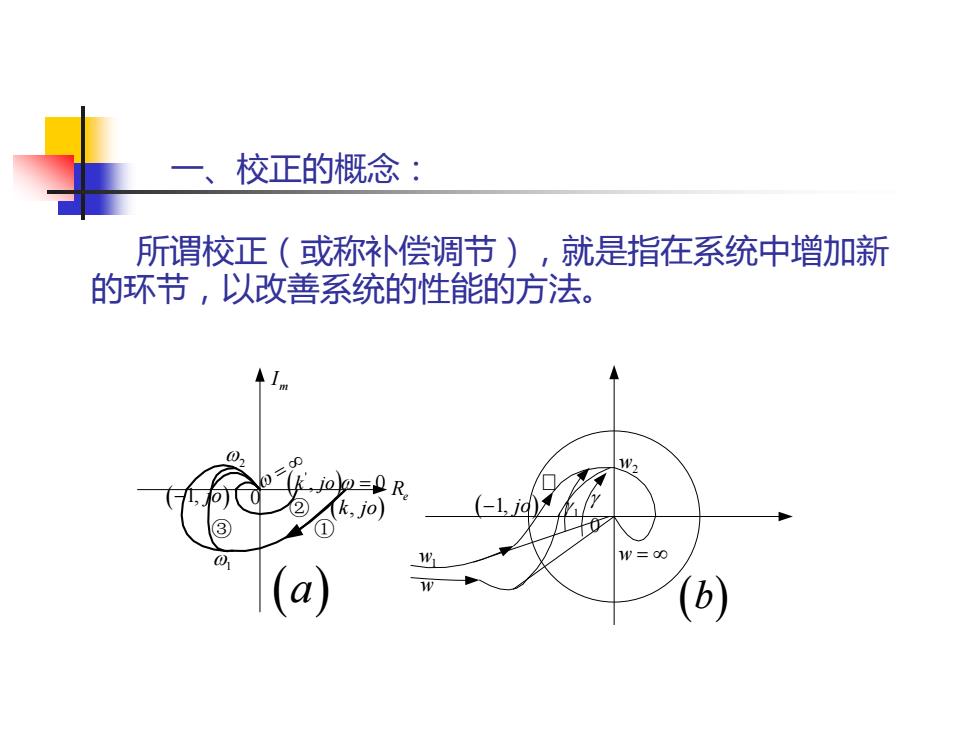
一、 校正的概念: 所谓校正(或称补偿调节),就是指在系统中增加新 的环节,以改善系统的性能的方法。 io=R k,jo) =00 公
一、校正的概念: 所谓校正(或称补偿调节),就是指在系统中增加新 的环节,以改善系统的性能的方法。 m I R e ① ② ③ = 2 (−1, jo) 0 1 ( ) ' k jo , = 0 (k jo , ) ① w1 w w2 w = 0 1 (−1, jo) (a) (b)