O09在Structure(结构)项目面板中,调整Fingers(手指)为5,Finger Links(手指连接)为3 www.verycg.neto四T Selection Level Sub-Object Patameters Trajectories +↑秀 Copy/Paste Structure Arms Neck Links: Spine Links: Leg Links:3÷ Tail Links:0÷ Ponytail1 Links0÷ Ponytail2 Link-0✉ Fingers:5 Finger Links3÷ Toes1■ Toe Links:.3 Pops:1厂2厂3■ Ankle Altach:02 Height1.75m÷ Triangle Pelvis Forearm Twist■ Forearm Links:2 Body Type- Skeleton CGpower.com.cn 完美动力动画网雪挺儿2007年12月25日提文
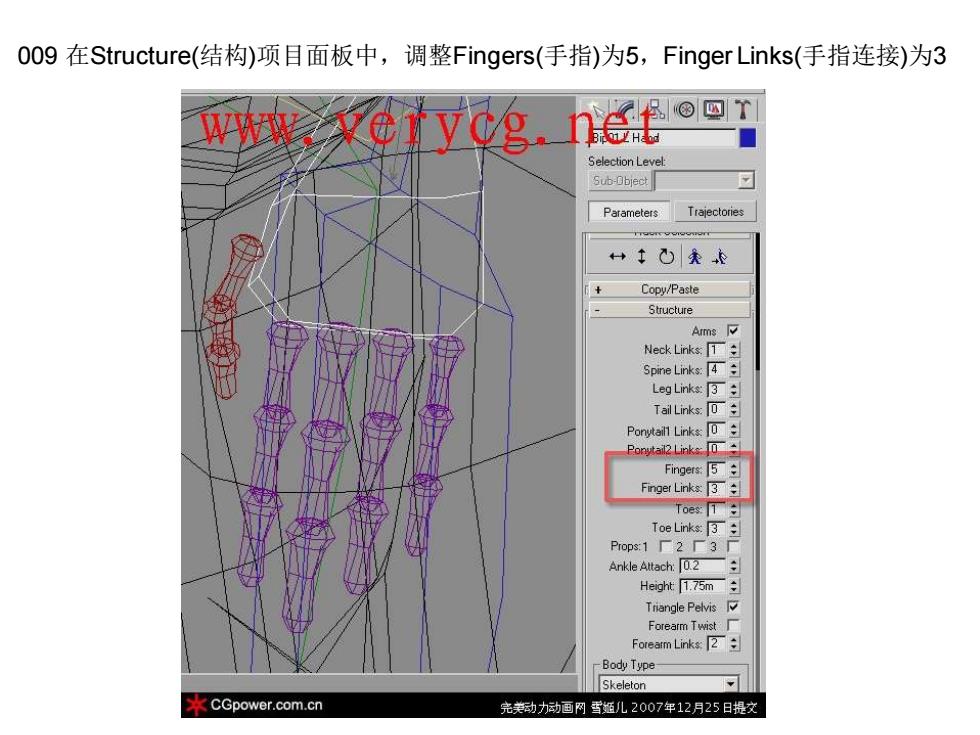
009 在Structure(结构)项目面板中,调整Fingers(手指)为5,Finger Links(手指连接)为3

010我们的模型穿着鞋子,所以我们将Toes(脚趾)和Toes Links(脚趾连接)值为1。 www.verycg.neom Selection Level: Sub-Object Parameters Trajectories +↑心类的 Copy/Paste Structure Arms Neck Links:T÷ Spine Links:4÷ Leg Links:3 Tail Links:0÷ Ponytail1 Links:0 Pcnytal22 Links:0÷ Fingers:5÷ Finger Links3 Toes:[T Toe Links:1÷ Props:123 Ankle Attach:0.2 Height:1.75m÷ Triangle Pelvis Forearm Twist厂 Forearm Links:2 Body Type Skeleton T CGpower.com.cn 完美动力动画网雪姬儿2007年12月25日提文
010 我们的模型穿着鞋子,所以我们将Toes(脚趾)和Toes Links(脚趾连接)值为1