第六章控制系统的校正 单变量线性系统的综合方法很多,但基本上可归纳为两大类,即根轨迹综合法 和频率响应综合法。本章介绍应用这两类方法进行综合、校正的基本思路和具体方 法,以及综合校正的一般过程。 6.1概述 前面几章讨论的几种控制系统的分析方法,是在系统结构和参数己知的前提下 分析系统的静、动态性能及其与参数之间的关系,一般称这个过程为系统分析。本 章则是讨论系统分析的逆问题,即控制系统的设计问题。它是根据对系统的要求, 选择合适的控制方案与系统结构,计算参数和选择元器件,通过仿真和实验研究, 建立起能满足要求的实用系统。这样一项复杂的工作,既要考虑技术要求,又要考 虑经济性、可靠性、安装工艺、使用维修等多方面要求。这里只限于讨论其中的技 术部分,即从控制观点出发,用数学方法寻找一个能满足技术要求的控制系统。通 常把这项工作称为系统的综合 控制系统可划分为广义对象(或受控系统)和控制器两大部分。广义对象(包括受 控对象、执行机构、阀门,以及检测装置等)是系统的基本部分,它们在设计过程中 往往是已知不变的,通常称为系统的“原有部分”或“固有部分”、“不可变部分”。 一般来说,仅由这部分构成系统,系统的性能较差:难以满足对系统提出的技术要 求,甚至是不稳定的,必须引入附加装置进行校正,这样的附加装置叫做校正装置 或补偿装置。控制器的核心组成部分是校正装置,因此综合的主要任务就在于设计 控制器。可以说,综合的中心是校正。综合的具体任务是选择校正方式,确定系统 结构和校正装置的类型以及计算参数等,这些工作的出发点和归宿点都是满足对系 统技术性能的要求,这些要求在单变量系统中往往都是以性能指标的形式给出。 一、性能指标 工程上,对单变量系统常用性能指标来衡量控制系统的优劣。在设计控制系统 时,对不同的控制系统提出不同的性能指标,或对同一控制系统提出不同形式的性 能指标。控制系统的经典设计方法习惯于在频域里进行,因此常用频率域性能指标。 然而时域指标具有直观,便于量测等优点。因而在许多场合下采用时域性能指标。 性能指标的提法虽然很多,但大体上可归纳为三大类,即稳态指标,时域动态 指标和频域动态指标,这些内容在第三章和第五章里已作过介绍,下面只作简单的 归纳。 1 稳态指标 稳态指标是衡量系统稳态精度的指标。控制系统稳态精度的表征一一稳态误差 e,一般用以下三种误差系数来表示 (I)稳态位置误差系数K,表示系统跟踪单位阶跃输入时系统稳态误差的大 小
97 第六章 控制系统的校正 单变量线性系统的综合方法很多,但基本上可归纳为两大类,即根轨迹综合法 和频率响应综合法。本章介绍应用这两类方法进行综合、校正的基本思路和具体方 法,以及综合校正的一般过程。 6.1 概 述 前面几章讨论的几种控制系统的分析方法,是在系统结构和参数已知的前提下, 分析系统的静、动态性能及其与参数之间的关系,一般称这个过程为系统分析。本 章则是讨论系统分析的逆问题,即控制系统的设计问题。它是根据对系统的要求, 选择合适的控制方案与系统结构,计算参数和选择元器件,通过仿真和实验研究, 建立起能满足要求的实用系统。这样一项复杂的工作,既要考虑技术要求,又要考 虑经济性、可靠性、安装工艺、使用维修等多方面要求。这里只限于讨论其中的技 术部分,即从控制观点出发,用数学方法寻找一个能满足技术要求的控制系统。通 常把这项工作称为系统的综合。 控制系统可划分为广义对象(或受控系统)和控制器两大部分。广义对象(包括受 控对象、执行机构、阀门,以及检测装置等)是系统的基本部分,它们在设计过程中 往往是已知不变的,通常称为系统的“原有部分”或“固有部分”、“不可变部分”。 一般来说,仅由这部分构成系统,系统的性能较差;难以满足对系统提出的技术要 求,甚至是不稳定的,必须引入附加装置进行校正,这样的附加装置叫做校正装置 或补偿装置。控制器的核心组成部分是校正装置,因此综合的主要任务就在于设计 控制器。可以说,综合的中心是校正。综合的具体任务是选择校正方式,确定系统 结构和校正装置的类型以及计算参数等,这些工作的出发点和归宿点都是满足对系 统技术性能的要求,这些要求在单变量系统中往往都是以性能指标的形式给出。 一、 性能指标 工程上,对单变量系统常用性能指标来衡量控制系统的优劣。在设计控制系统 时,对不同的控制系统提出不同的性能指标,或对同一控制系统提出不同形式的性 能指标。控制系统的经典设计方法习惯于在频域里进行,因此常用频率域性能指标。 然而时域指标具有直观,便于量测等优点。因而在许多场合下采用时域性能指标。 性能指标的提法虽然很多,但大体上可归纳为三大类,即稳态指标,时域动态 指标和频域动态指标,这些内容在第三章和第五章里已作过介绍,下面只作简单的 归纳。 1. 稳态指标 稳态指标是衡量系统稳态精度的指标。控制系统稳态精度的表征——稳态误差 ss e ,一般用以下三种误差系数来表示: (1) 稳态位置误差系数 KP ,表示系统跟踪单位阶跃输入时系统稳态误差的大 小
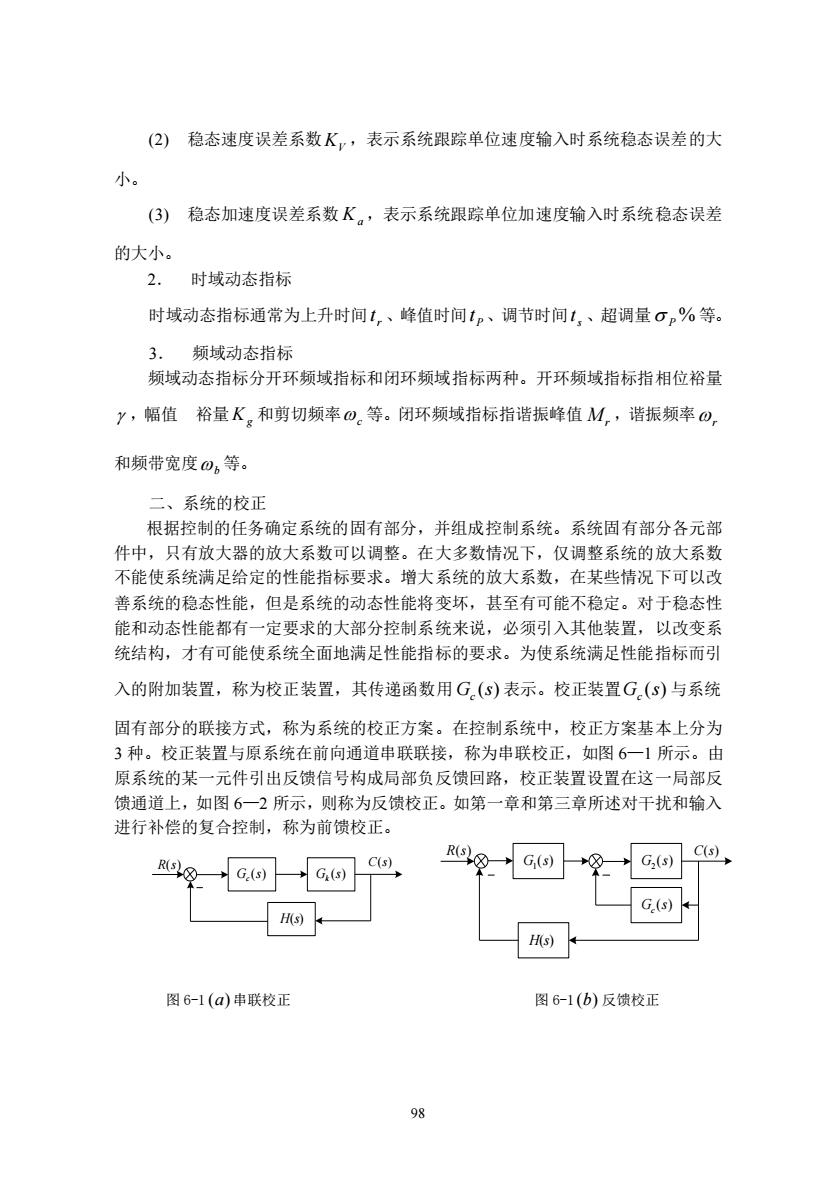
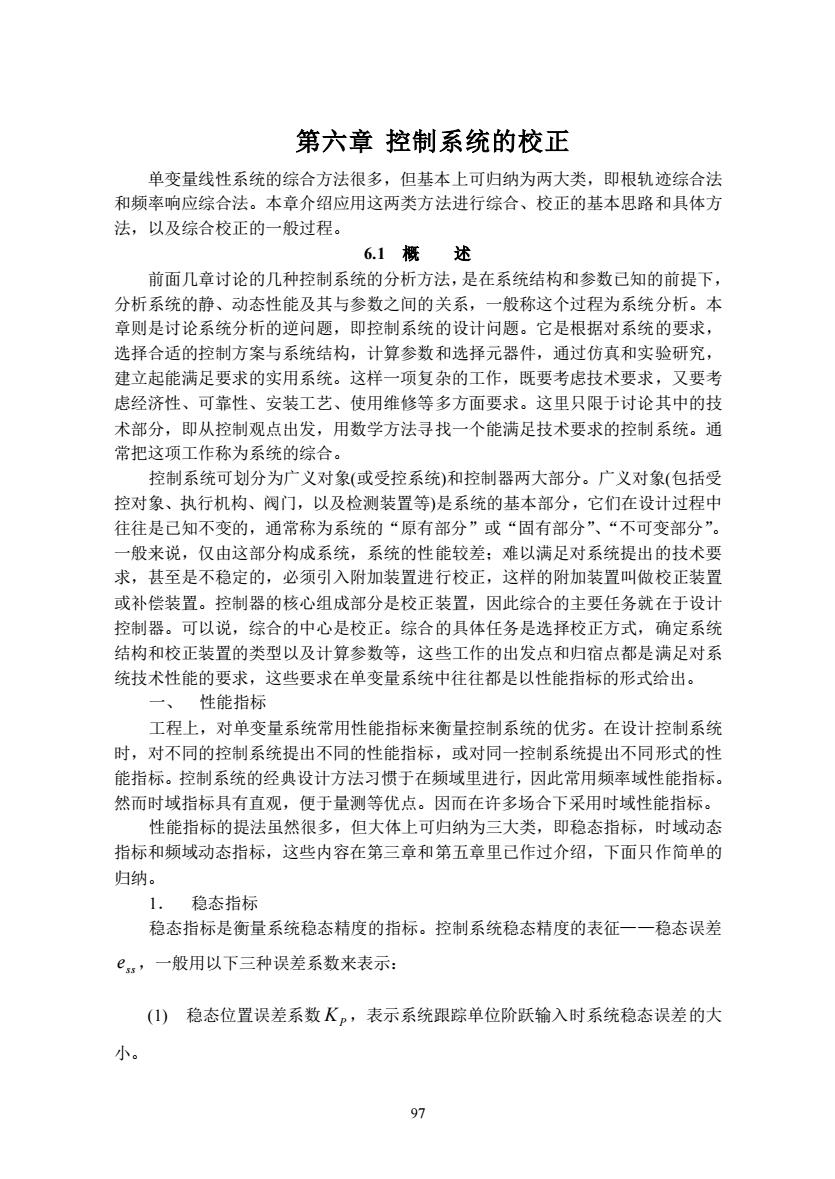
(②)稳态速度误差系数K,表示系统跟踪单位速度输入时系统稳态误差的大 小。 (③)稳态加速度误差系数K。,表示系统跟踪单位加速度输入时系统稳态误差 的大小。 2.时域动态指标 时域动态指标通常为上升时间1,、峰值时间1p、调节时间1,、超调量O,%等。 3.频域动态指标 频域动态指标分开环频域指标和闭环频域指标两种。开环频域指标指相位裕量 y,幅值裕量K。和剪切频率0等。闭环频域指标指谐振峰值M,谐振频率⊙, 和频带宽度0,等。 二、系统的校正 根据控制的任务确定系统的固有部分,并组成控制系统。系统固有部分各元部 件中,只有放大器的放大系数可以调整。在大多数情况下,仅调整系统的放大系数 不能使系统满足给定的性能指标要求。增大系统的放大系数,在某些情况下可以改 善系统的稳态性能,但是系统的动态性能将变坏,甚至有可能不稳定。对于稳态性 能和动态性能都有一定要求的大部分控制系统来说,必须引入其他装置,以改变系 统结构,才有可能使系统全面地满足性能指标的要求。为使系统满足性能指标而引 入的附加装置,称为校正装置,其传递函数用G(s)表示。校正装置G(s)与系统 固有部分的联接方式,称为系统的校正方案。在控制系统中,校正方案基本上分为 3种。校正装置与原系统在前向通道串联联接,称为串联校正,如图6一1所示。由 原系统的某一元件引出反馈信号构成局部负反馈回路,校正装置设置在这一局部反 馈通道上,如图6一2所示,则称为反馈校正。如第一章和第三章所述对干扰和输入 进行补偿的复合控制,称为前馈校正。 G.(s) 图6-1(a)串联校正 图6-1(b)反馈校正
98 (2) 稳态速度误差系数 KV ,表示系统跟踪单位速度输入时系统稳态误差的大 小。 (3) 稳态加速度误差系数 Ka ,表示系统跟踪单位加速度输入时系统稳态误差 的大小。 2. 时域动态指标 时域动态指标通常为上升时间 r t 、峰值时间 P t 、调节时间 s t 、超调量 P % 等。 3. 频域动态指标 频域动态指标分开环频域指标和闭环频域指标两种。开环频域指标指相位裕量 ,幅值 裕量 Kg 和剪切频率 c 等。闭环频域指标指谐振峰值 Mr ,谐振频率 r 和频带宽度 b 等。 二、系统的校正 根据控制的任务确定系统的固有部分,并组成控制系统。系统固有部分各元部 件中,只有放大器的放大系数可以调整。在大多数情况下,仅调整系统的放大系数 不能使系统满足给定的性能指标要求。增大系统的放大系数,在某些情况下可以改 善系统的稳态性能,但是系统的动态性能将变坏,甚至有可能不稳定。对于稳态性 能和动态性能都有一定要求的大部分控制系统来说,必须引入其他装置,以改变系 统结构,才有可能使系统全面地满足性能指标的要求。为使系统满足性能指标而引 入的附加装置,称为校正装置,其传递函数用 G (s) c 表示。校正装置 G (s) c 与系统 固有部分的联接方式,称为系统的校正方案。在控制系统中,校正方案基本上分为 3 种。校正装置与原系统在前向通道串联联接,称为串联校正,如图 6—1 所示。由 原系统的某一元件引出反馈信号构成局部负反馈回路,校正装置设置在这一局部反 馈通道上,如图 6—2 所示,则称为反馈校正。如第一章和第三章所述对干扰和输入 进行补偿的复合控制,称为前馈校正。 图 6-1 (a) 串联校正 图 6-1 (b) 反馈校正 G (s) c H(s) R(s) C(s) G (s) k ( ) 1 G s H(s) R(s) C(s) ( ) 2 G s G (s) c
6.2串联校正装置的特点和作用 本章主要针对单输入单输出线性定常系统的串联校正、反馈校正和前馈校正,分 别讨论超前校正装置、滞后校正装置和滞后一超前校正装置的设计问题,确定合适 的校正装置传递函数,以改善系统的根轨迹或颜率特性,使系统达到所要求的性能 指标。 1超前校正 ①传递函数 G.)=Ka+1 0<<1 aTs+1 最大超前角 9-sinl-a 1+a 1 最大超前角对应的频率 ②特点和作用 a.超前校正是通过其相位超前特性来改善系统的品质: b.超前校正增大了系统的相位裕量和截止频率o。(剪切频率),从而减小暂态 响应的超调量,提高其快速性 c.超前校正对提高稳态精度作用不大: d.超前校正适用于稳态精度已经满足、但暂态性能不满足要求的系统。 2.滞后校正 ①传递函数 G.)=KB万+1 BTs+1 B>1 ②特点和作用 .滯后校正是通过其低频积分特性来改普系统的品质: b.滞后校正是通过降低系统的截止频率®。(剪切频率)来增大相位裕量,因此 它虽然可以减小暂态响应的超调量,但却降低了系统的快速性: ℃.滞后校正可以改善系统的稳态精度: d.滑后校正适用于暂态性能指标已经满足、但需提高稳态精度的系统。 3.滞后一超前校正 传递函数 G.(6)=s+02s+1) (s+X合s+) 式中 _工>1= 这种校正兼有滞后、超前两种校正的优点。超前校正部分可以提高系统的相角 99
99 6.2 串联校正装置的特点和作用 本章主要针对单输入单输出线性定常系统的串联校正、反馈校正和前馈校正,分 别讨论超前校正装置、滞后校正装置和滞后一超前校正装置的设计问题,确定合适 的校正装置传递函数,以改善系统的根轨迹或频率特性,使系统达到所要求的性能 指标。 1.超前校正 ①传递函数 1 1 ( ) + + = Ts Ts Gc s Kc 0 1 最大超前角 + − = − 1 1 sin 1 m 最大超前角对应的频率 T m 1 = ②特点和作用 a.超前校正是通过其相位超前特性来改善系统的品质; b.超前校正增大了系统的相位裕量和截止频率 c (剪切频率),从而减小暂态 响应的超调量,提高其快速性; c.超前校正对提高稳态精度作用不大; d.超前校正适用于稳态精度已经满足、但暂态性能不满足要求的系统。 2.滞后校正 ①传递函数 1 1 ( ) + + = Ts Ts Gc s Kc 1 ②特点和作用 a.滯后校正是通过其低频积分特性来改善系统的品质; b.滯后校正是通过降低系统的截止频率 c (剪切频率)来增大相位裕量,因此, 它虽然可以减小暂态响应的超调量,但却降低了系统的快速性; c.滯后校正可以改善系统的稳态精度; d.滯后校正适用于暂态性能指标已经满足、但需提高稳态精度的系统。 3.滞后—超前校正 传递函数 ( 1)( 1) ( 1)( 1) ( ) 2 1 1 2 + + + + = s T T s T s T s G s c 式中 ' 1 2 2 2 1 ' 1 1 T T T T T T = = = 这种校正兼有滞后、超前两种校正的优点。超前校正部分可以提高系统的相角

裕度,增加系统的稳定性,改善系统的暂态性能:滞后校正部分可以改善系统的稳 态性能。 6.3串联校正装置的设计步豫 串联校正装置的设计方法并没有一成不变的格式,设计者往往需要经过反复循 环的过程才能得到最佳方案,而且其解又不是唯一的。但为了便于初学者能较快地 初步掌握设计系统的方法,给出表61设计步骤作为参考。 表6.1 设计方 颜率法 法 校正装置 (1)根据要求的稳态误差或误差系数,确定开环增益K值: (2)利用己知的K值,绘制校正前系统的开环对数频率特性,并确定 相位裕量,和短值裕量: (3)由给定的相位裕量y计算出需要超前校正装置产生的最大超前相允 超 Pm=y-1+6,一般取6=50~10°: (4)根据最大超前相角求出a值,即a=(1-sin)/1+sin): (5)计算校正装置在m处的10g(1/)。在校正前系统的对数幅频 正 特性图上找出幅值为-10g(1/a)处的频率,这个频率G,(s)的om即 是的也是校正后系统的开环剪切频率0:,根据确定的值,求出超前 校正装置的转折频率1/T=o心√a,a=o/Na (6)由上述的K和a,确定G,(s)的增益K。=K/a ()绘制校正后的对数烦率特性】 并验算相位裕量和幅值裕量是否满足 要求,若不满足,需增大G值,从步骤(3)重新进行设计。 (1)提给定的稳态芳或误若系数,确定开环增若值. (2)利用K值,绘制未校正系统的开环对数频率特性,并确定相位裕 量y,和幅值裕量: (3)由给定的相位裕量y的要求,在校正前的开环对数相频特性曲线上 找出这样一个频率,要求在该频率处的相角为p=-180°+y+6,选 择这一频率作为校正后系统的剪切频率:。£是为了补偿由滞后校正 后 装置在0:处所产生的滞后角,通常取£=5°~15°: 校 (4)确定未校正系统在新@。处的幅值衰减到0dB时所需的衰减量,并 正 令其等于-20gVB,据此,求出B值: (5)选择校正装置的一个转折频率【G(s)的零 点/T=(/5~110)o,则另一个转折频G(s)的极点为BT (6)由上述的K和B,确定G.(s)的增益K。=K/B )绘制正后的对率性】 并验算相位裕量和幅值裕量是否满足 要求,若不满足,则应改变T值,重新进行设计。 100
100 裕度,增加系统的稳定性,改善系统的暂态性能;滞后校正部分可以改善系统的稳 态性能。 6.3 串联校正装置的设计步骤 串联校正装置的设计方法并没有一成不变的格式,设计者往往需要经过反复循 环的过程才能得到最佳方案,而且其解又不是唯一的。但为了便于初学者能较快地 初步掌握设计系统的方法,给出表 6-1 设计步骤作为参考。 表 6-1 设计方 法 校正装置 频 率 法 超 前 校 正 (1)根据要求的稳态误差或误差系数,确定开环增益 K 值; (2)利用已知的 K 值,绘制校正前系统的开环对数频率特性,并确定 相位裕量 1 和幅值裕量; (3)由给定的相位裕量 计算出需要超前校正装置产生的最大超前相角 m = - 1 + ,一般取 o = 5 ~ o 10 ; (4)根据最大超前相角求出 值,即 (1 sin ) (1 sin ) = − m + m ; (5)计算校正装置在 m 处的 10 lg(1 ) 。在校正前系统的对数幅频 特性图上找出幅值为 −10 lg(1 ) 处的频率,这个频率 G (s) c 的 m 即 是的也是校正后系统的开环剪切频率 c ,根据确定的 c 值,求出超前 校正装置的转折频率 1 T =c ,1 T =c (6)由上述的 K 和 ,确定 G (s) c 的增益 Kc = K (7)绘制校正后的对数频率特性,并验算相位裕量和幅值裕量是否满足 要求,若不满足,需增大 值,从步骤(3)重新进行设计。 滯 后 校 正 (1)根据给定的稳态误差或误差系数,确定开环增益 K 值; (2)利用 K 值,绘制未校正系统的开环对数频率特性,并确定相位裕 量 1 和幅值裕量; (3)由给定的相位裕量 的要求,在校正前的开环对数相频特性曲线上 找出这样一个频率,要求在该频率处的相角为 = − + + o 180 ,选 择这一频率作为校正后系统的剪切频率 c 。 是为了补偿由滯后校正 装置在 c 处所产生的滞后角,通常取 o = 5 ~ o 15 ; (4)确定未校正系统在新 c 处的幅值衰减到 0dB 时所需的衰减量,并 令其等于 − 20 lg 1 ,据此,求出 值; ( 5 ) 选 择 校 正 装 置 的 一 个 转 折 频 率 [ G (s) c 的 零 点] T c 1 = (1 5 ~1 10) ,则另一个转折频率[ G (s) c 的极点]为 1 T ; (6)由上述的 K 和 ,确定 G (s) c 的增益 Kc = K (7)绘制校正后的对数频率特性,并验算相位裕量和幅值裕量是否满足 要求,若不满足,则应改变 T 值,重新进行设计

典型例题分析: 例6-1山设有一单位反馈控制系统,其开环传递函数为 G(s)=s(s+2) 要求稳态速度误差系数K,=20/s),相位裕量不小于50°,增益裕量不小于10dB, 试设计一串联超前校正装置,使系统满足要求的性能指标。 解:1.在设计时,应先根据要求的K,值求出应调整的放大系数K 超前校正装置的传递函数为G.(⊙)=K,a+ 1+75 则校正后系统的开环传递函数为G(s)G(s)。令 4K G,()=KGS)=s5+2 其中K=K.a 4K 因为K,=回G,份=细5+22水=20,放可求得K=10. 这样未校正系统的频率特性为G,U@)Fjo1+0.5@ 20 2.画出末校正系统的伯德图,如图6-2的虚线所示。 令A(o)=lG4Uo=1,即 20 =1,则o=o。=6.3ad/s) 01+(0.5w)2 1=180°+p(0.)=180°-90°-g10.5×6.3=174 令p()=∠Go)=-90°-g0.50=-180°,则o=0g=o(rads),于是增 益裕量为+r(dB 这说明末校正系统的相位裕量为17°,不满足系统要求,虽然幅值裕量已满足 要求。仍需进行校正装置的设计。 0
101 典型例题分析: [例 6-1] 设有一单位反馈控制系统,其开环传递函数为 ( 2) 4 ( ) + = s s G s 要求稳态速度误差系数 K 20(1 s) v = ,相位裕量不小于 0 50 ,增益裕量不小于 10dB , 试设计一串联超前校正装置,使系统满足要求的性能指标。 解:1.在设计时,应先根据要求的 KV 值求出应调整的放大系数 K 超前校正装置的传递函数为 Ts Ts Gc s Kc + + = 1 1 ( ) 则校正后系统的开环传递函数为 G (s)G(s) c 。令 ( 2) 4 ( ) ( ) + = = s s K G s KG s k 其中 K = Kc 因为 2 20 ( 2) 4 lim ( ) lim 0 0 = = + = = → → K s s K K sG s s s k s V ,故可求得 K =10 。 这样未校正系统的频率特性为 (1 0.5 ) 20 ( ) j j G j k + = 2.画出末校正系统的伯德图,如图 6-2 的虚线所示。 令 A() = Gk ( j) =1 ,即 1 1 (0.5 ) 20 2 = + ,则 6.3(rad s) =c = 0 0 0 1 0 1 =180 + ( ) =180 − 90 − 0.5 6.3 =17 − c tg 令 0 1 0 ( ) = ( ) = −90 − 0.5 = −180 − Gk j tg ,则 (rad s) =g = ,于是增 益裕量为 + (dB) 这说明末校正系统的相位裕量为 0 17 ,不满足系统要求,虽然幅值裕量已满足 要求。仍需进行校正装置的设计