自动控制理论 第四章根轨迹法 新腰大学电气工程学院
第四章根轨迹法 新疆大学 电气工程学院 自动控制理论
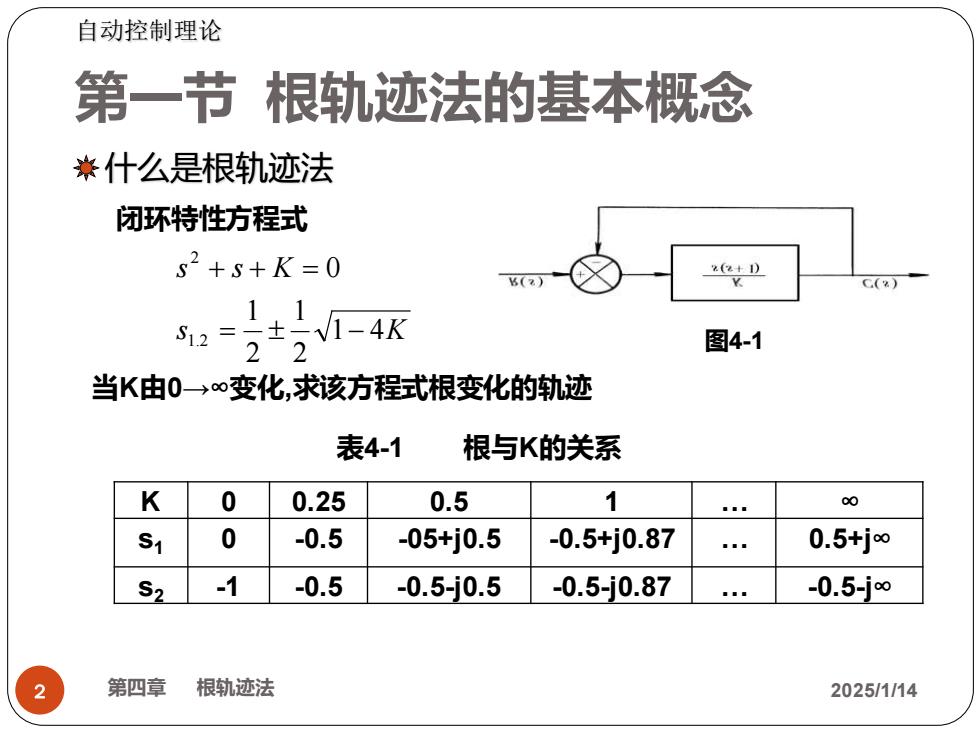
自动控制理论 第一节根轨迹法的基本概念 米什么是根轨迹法 闭环特性方程式 s2+S+K=0 (2+) () C(%) S2=+1-4K 22 图4-1 当K由0→∞变化,求该方程式根变化的轨迹 表4-1 根与K的关系 K 0 0.25 0.5 1 oo S1 0 -0.5 -05+j0.5 -0.5+j0.87 0.5+j∞ S2 -1 -0.5 -0.5j0.5 -0.5-j0.87 -0.5-j∞ 第四章 根轨迹法 2025/1/14
第一节 根轨迹法的基本概念 2 第四章 根轨迹法 2025/1/14 s K s s K 1 4 2 1 2 1 0 1.2 2 = − + + = K 0 0.25 0.5 1 . ∞ s1 0 -0.5 -05+j0.5 -0.5+j0.87 . 0.5+j∞ s2 -1 -0.5 -0.5-j0.5 -0.5-j0.87 . -0.5-j∞ 自动控制理论 什么是根轨迹法 图4-1 闭环特性方程式 当K由0→∞变化,求该方程式根变化的轨迹 表4-1 根与K的关系
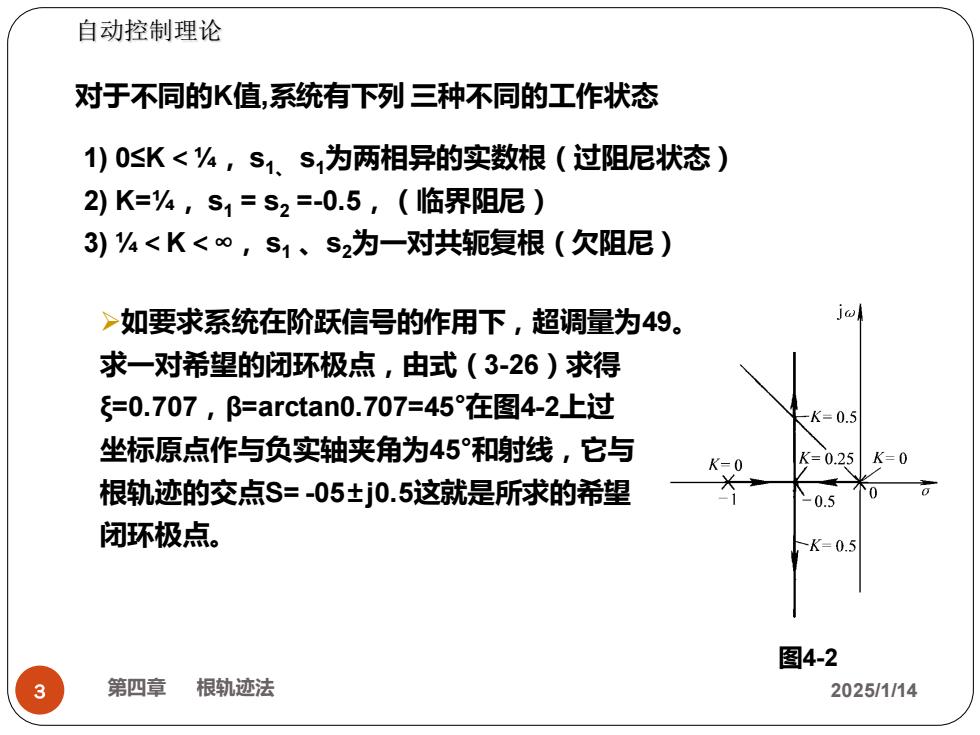
自动控制理论 对于不同的K值,系统有下列三种不同的工作状态 1)0≤K<4,S1,s为两相异的实数根(过阻尼状态) 2)K=4,S1=s2=-0.5,(临界阻尼) 3)4<K<∞,S1、S2为一对共轭复根(欠阻尼) >如要求系统在阶跃信号的作用下,超调量为49。 jol 求一对希望的闭环极点,由式(3-26)求得 =0.707,=arctan0.707=45°在图4-2上过 -K=0.5 坐标原点作与负实轴夹角为45°和射线,它与 =0.25 K=0 根轨迹的交点S=-05±j0.5这就是所求的希望 -0.5 闭环极点。 K=0.5 图4-2 第四章 根轨迹法 2025/1/14
3 第四章 根轨迹法 2025/1/14 图4-2 对于不同的K值,系统有下列 三种不同的工作状态 1) 0≤K<¼, s1、 s1为两相异的实数根(过阻尼状态) 2) K=¼, s1 = s2 =-0.5,(临界阻尼) 3) ¼<K<∞ , s1 、s2为一对共轭复根(欠阻尼) ➢如要求系统在阶跃信号的作用下,超调量为49。 求一对希望的闭环极点,由式(3-26)求得 ξ=0.707,β=arctan0.707=45°在图4-2上过 坐标原点作与负实轴夹角为45°和射线,它与 根轨迹的交点S= -05±j0.5这就是所求的希望 闭环极点。 自动控制理论
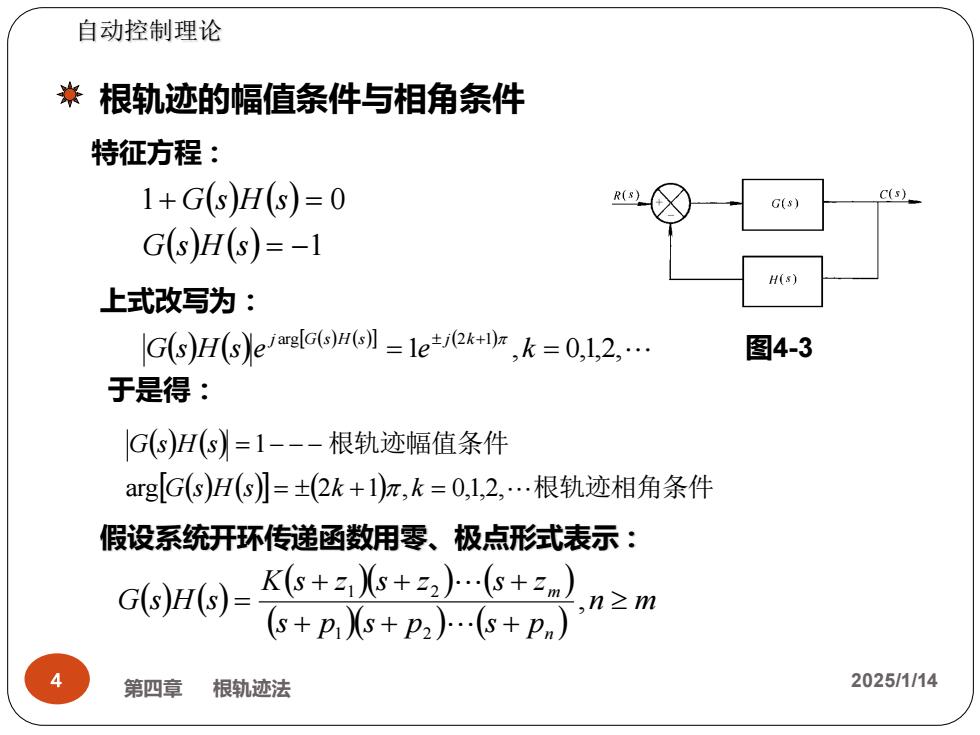
自动控制理论 根轨迹的幅值条件与相角条件 特征方程: 1+G(s)H(s)=0 R( C(s) G() G(s)H(s)=-1 H(s) 上式改写为: G(S)H(s)e=1e-ktI,k=0.12. 图4-3 于是得: G(s)H(s=1-根轨迹幅值条件 arg[Gs)H(s】=±(2k+1)π,k=0,l,2,.根轨迹相角条件 假设系统开环传递函数用零、极点形式表示: G6)H)=K6++)-s+2 ,n≥m (s+Pi)s+p2).(s+p) 第四章 根轨迹法 2025/1/14
( ) ( ) ( ) ( ) 1 1 0 = − + = G s H s G s H s ( ) ( ) ( ) ( ) ( ) 根轨迹相角条件 根轨迹幅值条件 arg 2 1 , 0,1,2, 1 = + = = − − − G s H s k k G s H s 4 第四章 根轨迹法 2025/1/14 图4-3 根轨迹的幅值条件与相角条件 特征方程: 上式改写为: 自动控制理论 ( ) ( ) G s H s e j argG(s)H(s) =1e j(2k+1) ,k = 0,1,2, 于是得: 假设系统开环传递函数用零、极点形式表示: ( ) ( ) ( )( ) ( ) ( )( ) ( ) n m s p s p s p K s z s z s z G s H s n m + + + + + + = , 1 2 1 2
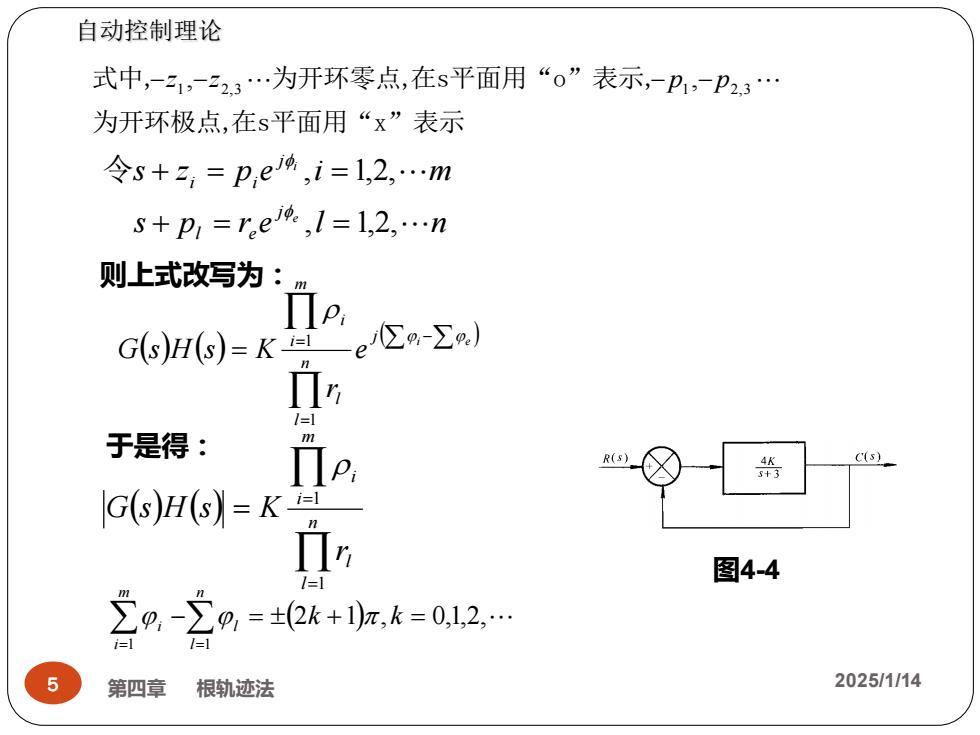
自动控制理论 式中,-,-23.为开环零点,在s平面用“0”表示,-P,一P23. 为开环极点,在s平面用“x”表示 令s+z,=p,e9,i=1,2.m S+p,=e9,1=1,2,.n 则上式改写为: G(s)H(s)=K—e E-∑) i 于是得: m R(s) C(s) G)H(s=K 1 图4-4 20,-立0=±0k+z,k=012 5 第四章 根轨迹法 2025/1/14
( ) ( ) ( ) = − = = i e j n l l m i i e r G s H s K 1 1 5 第四章 根轨迹法 2025/1/14 自动控制理论 为开环极点,在s平面用“x”表示 式中,−z1 ,−z2,3为开环零点,在s平面用“o”表示,− p1 ,− p2,3 s p r e l n s z p e i m e i j l e j i i , 1,2, , 1,2, + = = + = = 令 则上式改写为: 图4-4 于是得: (2 1) , 0,1,2, 1 1 − = + = = = k k n l l m i i ( ) ( ) = = = n l l m i i r G s H s K 1 1