
40L(o) 100 GG G -40 90 p(o) 09 1 10 -90 G GG -180 17代500 图62校正前、后系统的伯德图 3.根据题意,至少要求超前相角为50°-17°=33°。考虑到串联超前校正装置 后幅频特性的剪切频率o。要向右移,将使原有的17°还要减小,因此还需增加约5 的超前相角,故共需增加超前相角pm=33°+5°=38°。 4.a=1-sn0=024 1+sinm 5.再用作图法求@。,因为-10g。=-10g417=-62d6),所以在未校正 的对数幅频特性曲线L(o回)~0上找出与-6.2(dB)所对应的频率 o.=0。=9(ads),这个频率就是校正后系统的剪切频率a。于是再计算T 7=0a=441, 1-02=184 aT a 故可得超前校正装置的传递函数为 G.(6)=K.(+44 1+0227s +18=K.a4+00s4 其中K。=K/a=10/0.24=41.7 6.校正后系统的开环传递函数为 102
102 0 -40 -20 40 20 c 1 2 10 100 L() " c Gc GGc Gk 1 2 10 100 o 17 o 50 o 0 o − 90 o −180 o 90 Gc Gk GGc () 图 6-2 校正前、后系统的伯德图 3.根据题意,至少要求超前相角为 0 0 0 50 −17 = 33 。考虑到串联超前校正装置 后幅频特性的剪切频率 c 要向右移,将使原有的 0 17 还要减小,因此还需增加约 0 5 的超前相角,故共需增加超前相角 0 0 0 m = 33 + 5 = 38 。 4. 0.24 1 sin 1 sin = + − = m m 5.再用作图法求 m ,因为 10lg 4.17 6.2( ) 1 −10lg = − = − dB ,所以在未校正 的对数幅频特性曲线 L() ~ 上找出 与 − 6.2(dB) 所对应的频率 9( ) '' rad s m = c = ,这个频率就是校正后系统的剪切频率 '' c 。于是再计算 T 4.41 1 = c = T , 18.4 1 = = c T 故可得超前校正装置的传递函数为 ) 1 0.054 1 0.227 ) ( 18.4 4.41 ( ) ( s s K s s Gc s Kc c + + = + + = 其中 Kc = K =10 0.24 = 41.7 6.校正后系统的开环传递函数为
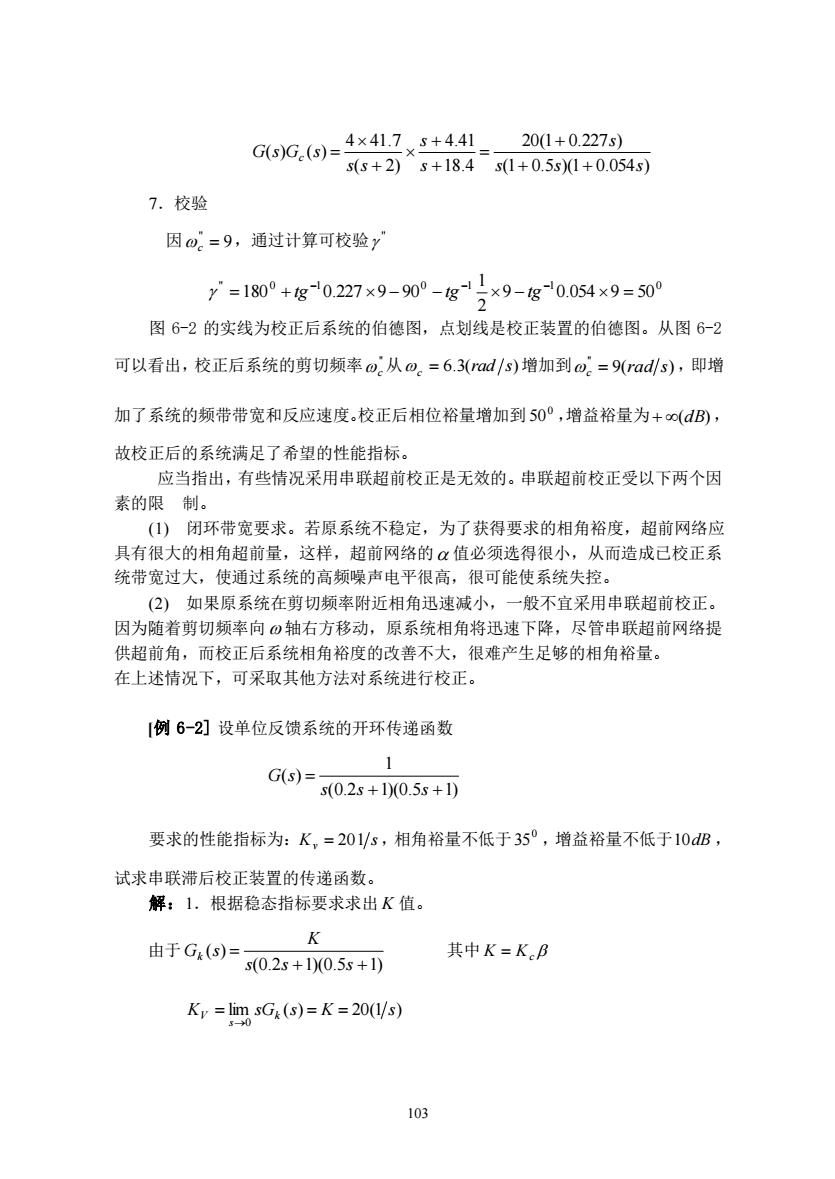
Gs)G.=4x417x5+44.201+0.275 s(s+2)s+18.4s1+0.5s)1+0.054s) 7.校验 因=9,通过计算可校验y y=180°+g0.27×9-900-g×9-g-0.054×9=500 图6-2的实线为校正后系统的伯德图,点划线是校正装置的伯德图。从图6-2 可以看出,校正后系统的剪切频率o从0。=6.3(rad/s)增加到o。=9(rads),即增 加了系统的频带带宽和反应速度。校正后相位裕量增加到S0°,增益裕量为+c(dB), 故校正后的系统满足了希望的性能指标。 应当指出,有些情况采用串联超前校正是无效的。串联超前校正受以下两个因 素的限制。 ()闭环带宽要求。若原系统不稳定,为了获得要求的相角裕度,超前网络应 具有很大的相角超前量,这样,超前网络的α值必须选得很小,从而造成己校正系 统带宽过大,使通过系统的高频噪声电平很高,很可能使系统失控。 (2)如果原系统在剪切频率附近相角迅速减小,一般不宜采用串联超前校正 因为随者剪切频率向©轴右方移动,原系统相角将迅速下降,尽管串联超前网络提 供超前角,而校正后系统相角裕度的改善不大,很难产生足够的相角裕量。 在上述情况下,可采取其他方法对系统进行校正。 [例6-2]设单位反馈系统的开环传递函数 1 G5)=s02s+10.5s+0 要求的性能指标为:K,=201/s,相角裕量不低于35°,增益裕量不低于10B, 试求串联滞后校正装置的传递函数。 解:1.根据稳态指标要求求出K值 K 由于G.⊙)=02s+10.5s+ 其中K=KB Ky =lim sG (s)=K=20(l/s) 103
103 (1 0.5 )(1 0.054 ) 20(1 0.227 ) 18.4 4.41 ( 2) 4 41.7 ( ) ( ) s s s s s s s s G s G s c + + + = + + + = 7.校验 因 9 '' c = ,通过计算可校验 '' '' 0 1 0 1 1 0 9 0.054 9 50 2 1 =180 + 0.227 9 − 90 − − = − − − tg tg tg 图 6-2 的实线为校正后系统的伯德图,点划线是校正装置的伯德图。从图 6-2 可以看出,校正后系统的剪切频率 '' c 从 6.3(rad s) c = 增加到 9( ) '' rad s c = ,即增 加了系统的频带带宽和反应速度。校正后相位裕量增加到 0 50 ,增益裕量为 + (dB) , 故校正后的系统满足了希望的性能指标。 应当指出,有些情况采用串联超前校正是无效的。串联超前校正受以下两个因 素的限 制。 (1) 闭环带宽要求。若原系统不稳定,为了获得要求的相角裕度,超前网络应 具有很大的相角超前量,这样,超前网络的 值必须选得很小,从而造成已校正系 统带宽过大,使通过系统的高频噪声电平很高,很可能使系统失控。 (2) 如果原系统在剪切频率附近相角迅速减小,一般不宜采用串联超前校正。 因为随着剪切频率向 轴右方移动,原系统相角将迅速下降,尽管串联超前网络提 供超前角,而校正后系统相角裕度的改善不大,很难产生足够的相角裕量。 在上述情况下,可采取其他方法对系统进行校正。 [例 6-2] 设单位反馈系统的开环传递函数 (0.2 1)(0.5 1) 1 ( ) + + = s s s G s 要求的性能指标为: K s v = 201 ,相角裕量不低于 0 35 ,增益裕量不低于 10dB , 试求串联滞后校正装置的传递函数。 解:1.根据稳态指标要求求出 K 值。 由于 (0.2 1)(0.5 1) ( ) + + = s s s K G s k 其中 K = Kc lim ( ) 20(1 ) 0 K sG s K s k s V = = = →
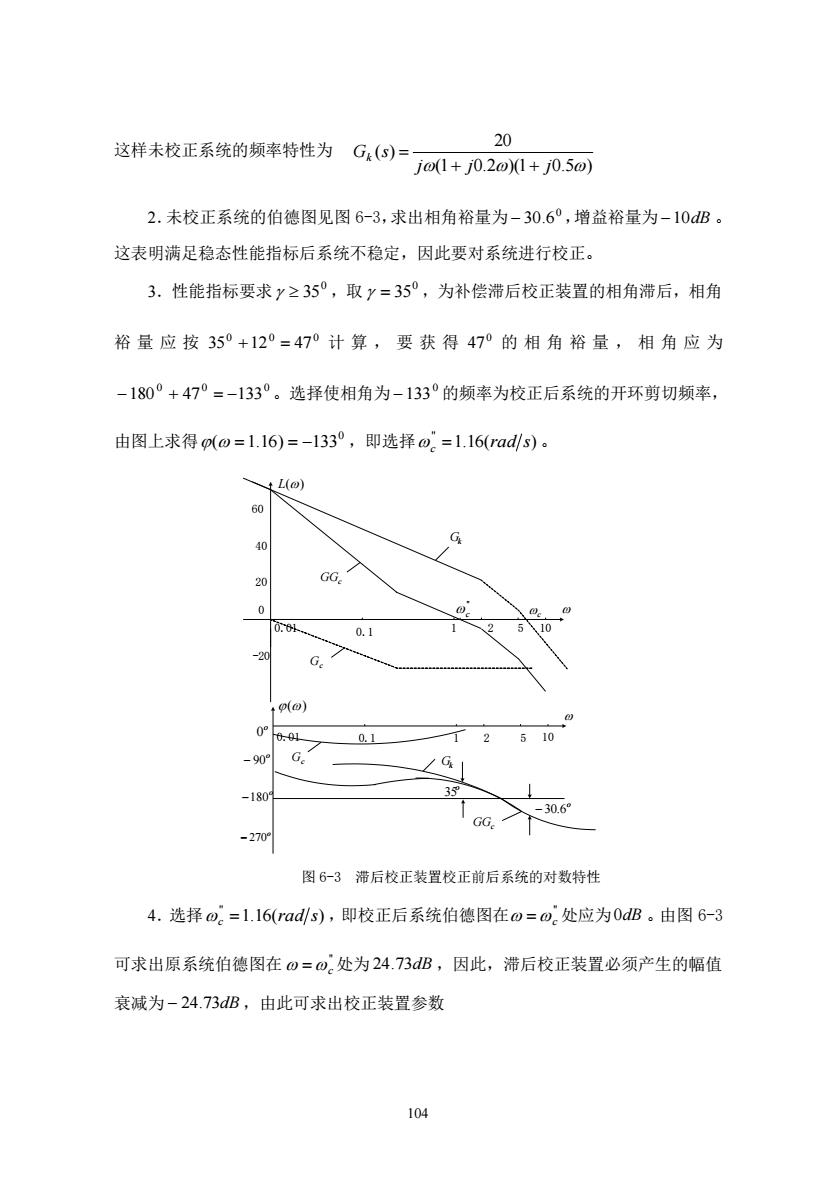
这样未校正系统的频率特性为G,(s)= 20 j01+j0.2o1+j0.5o) 2.未校正系统的伯德图见图6-3,求出相角裕量为-30.6°,增益裕量为-10dB 这表明满足稳态性能指标后系统不稳定,因此要对系统进行校正。 3.性能指标要求y≥35°,取y=35°,为补偿滞后校正装置的相角滞后,相角 裕量应按35°+12°=47°计算,要获得47的相角裕量,相角应为 -180°+47°=-1330。选择使相角为-133°的频率为校正后系统的开环剪切频率, 由图上求得p(o=1.16)=-133°,即选择o”=1.16(rads). L(o) G 0.1 G。 (w) 2510 35 -270 图6-3滞后校正装置校正前后系统的对数特性 4.选择o2=1.16(ads),即校正后系统伯德图在0=oc处应为0dB。由图6-3 可求出原系统伯德图在0=0处为24.73dB,因此,滞后校正装置必须产生的幅值 衰减为-24.73dB,由此可求出校正装置参数 104
104 这样未校正系统的频率特性为 (1 0.2 )(1 0.5 ) 20 ( ) j j j G s k + + = 2.未校正系统的伯德图见图 6-3,求出相角裕量为 0 − 30.6 ,增益裕量为−10dB 。 这表明满足稳态性能指标后系统不稳定,因此要对系统进行校正。 3.性能指标要求 0 35 ,取 0 = 35 ,为补偿滞后校正装置的相角滞后,相角 裕量应按 0 0 0 35 +12 = 47 计算,要获得 0 47 的相角裕量,相角应为 0 0 0 −180 + 47 = −133 。选择使相角为 0 −133 的频率为校正后系统的开环剪切频率, 由图上求得 0 ( =1.16) = −133 ,即选择 1.16( ) '' rad s c = 。 L() 0 60 -20 40 20 c 0.01 " c Gc GGc Gk 1 10 0.1 2 5 o − 30.6 o 35 o 0 o − 90 o −180 o − 270 Gk GGc () 0.1 1 10 0.01 2 5 Gc 图 6-3 滞后校正装置校正前后系统的对数特性 4.选择 1.16( ) '' rad s c = ,即校正后系统伯德图在 " =c 处应为 0dB 。由图 6-3 可求出原系统伯德图在 " =c 处为 24.73dB ,因此,滞后校正装置必须产生的幅值 衰减为 − 24.73dB ,由此可求出校正装置参数