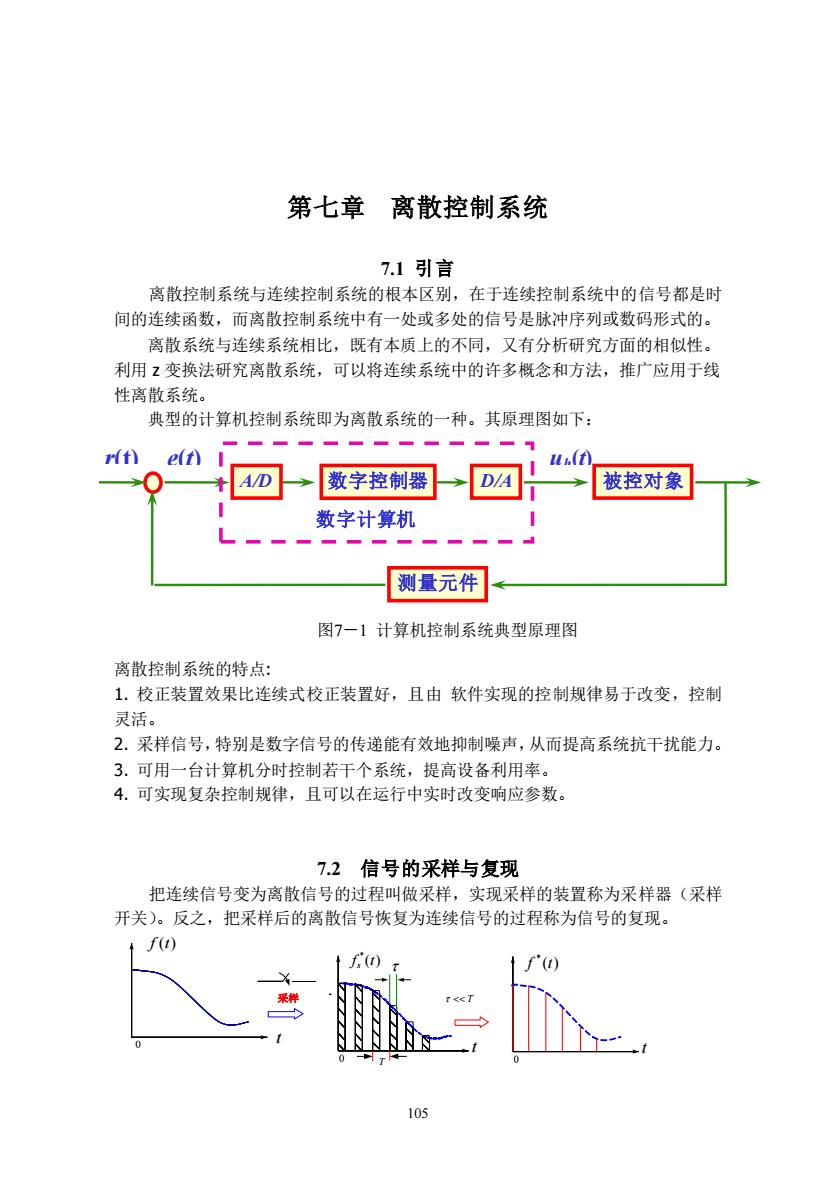
第七章离散控制系统 7.1引言 离散控制系统与连续控制系统的根本区别,在于连续控制系统中的信号都是时 间的连续函数,而离散控制系统中有一处或多处的信号是脉冲序列或数码形式的。 离散系统与连续系统相比,既有本质上的不同,又有分析研究方面的相似性。 利用2变换法研究离散系统,可以将连续系统中的许多概念和方法,推广应用于线 性离散系统。 典型的计算机控制系统即为离散系统的一种。其原理图如下: ========男 r(t) u.(t0 A/D 数字控制器→DA 被控对象 数字计算机 测量元件 图7一1计算机控制系统典型原理图 离散控制系统的特点: 1.校正装置效果比连续式校正装置好,且由软件实现的控制规律易于改变,控制 灵活。 2.采样信号,特别是数字信号的传递能有效地抑制噪声,从而提高系统抗干扰能力。 3.可用一台计算机分时控制若干个系统,提高设备利用率。 4.可实现复杂控制规律,且可以在运行中实时改变响应参数。 72信号的采样与复现 把连续信号变为离散信号的过程叫做采样,实现采样的装置称为采样器(采样 开关)。反之,把采样后的离散信号恢复为连续信号的过程称为信号的复现。 f() f( 105
105 第七章 离散控制系统 7.1 引言 离散控制系统与连续控制系统的根本区别,在于连续控制系统中的信号都是时 间的连续函数,而离散控制系统中有一处或多处的信号是脉冲序列或数码形式的。 离散系统与连续系统相比,既有本质上的不同,又有分析研究方面的相似性。 利用 z 变换法研究离散系统,可以将连续系统中的许多概念和方法,推广应用于线 性离散系统。 典型的计算机控制系统即为离散系统的一种。其原理图如下: 离散控制系统的特点: 1. 校正装置效果比连续式校正装置好,且由 软件实现的控制规律易于改变,控制 灵活。 2. 采样信号,特别是数字信号的传递能有效地抑制噪声,从而提高系统抗干扰能力。 3. 可用一台计算机分时控制若干个系统,提高设备利用率。 4. 可实现复杂控制规律,且可以在运行中实时改变响应参数。 7.2 信号的采样与复现 把连续信号变为离散信号的过程叫做采样,实现采样的装置称为采样器(采样 开关)。反之,把采样后的离散信号恢复为连续信号的过程称为信号的复现。 A/D 数字控制器 D/A 被控对象 测量元件 e*(t)数字计算机 r(t) e(t) u*(t) uh(t) c(t) _ 图7-1 计算机控制系统典型原理图 采样 t t T ( ) * f t s f (t) 0 0 t ( ) * f t 0 T 采样 t t T ( ) * f t s f (t) 0 0 t ( ) * f t 0 T 采样 t t T ( ) * f t s f (t) 0 0 t ( ) * f t 0 T
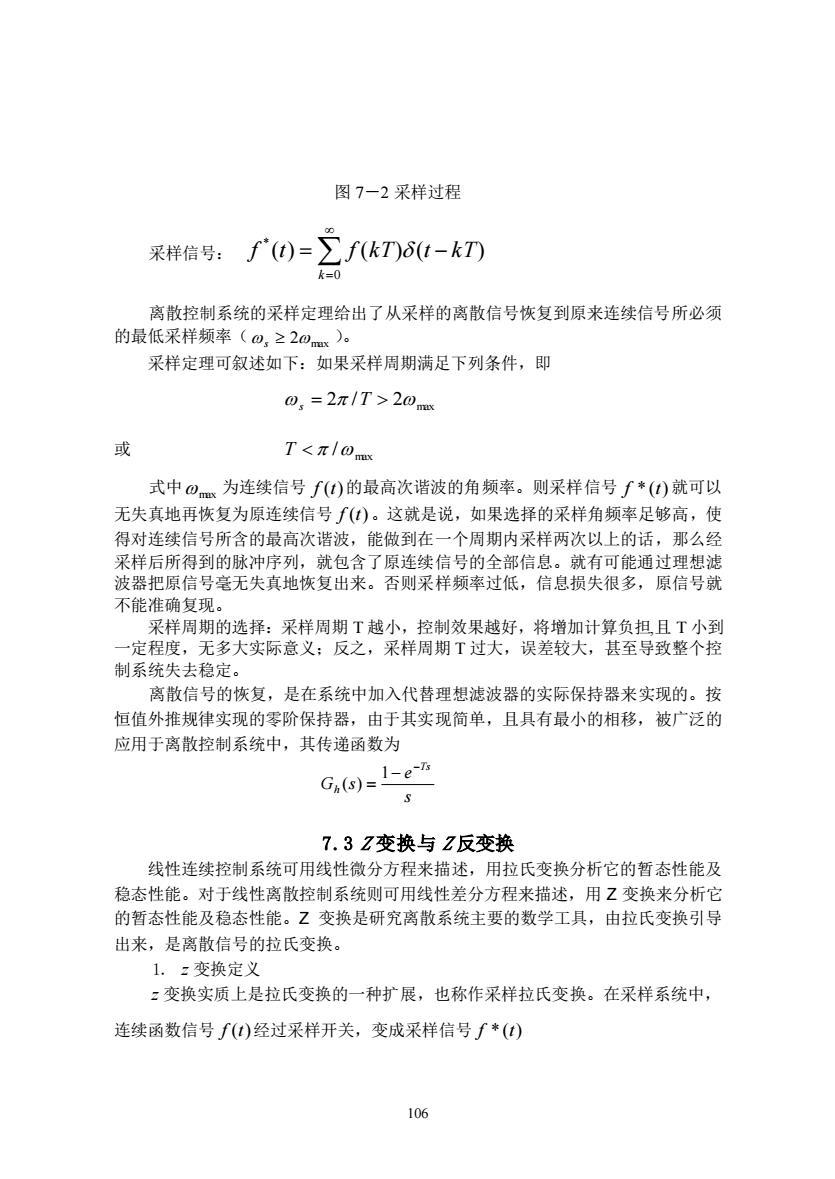
图7-2采样过程 采样信号:f0)=∑fkT)心(-kD A-0 离散控制系统的采样定理给出了从采样的离散信号恢复到原来连续信号所必须 的最低采样频率(0,≥20x)。 采样定理可叙述如下:如果采样周期满足下列条件,即 0,=2π/T>20m 或 T<π/om 式中⊙为连续信号f(t)的最高次谐波的角频率。则采样信号f*()就可以 无失真地再恢复为原连续信号∫()。这就是说,如果选择的采样角频率足够高,使 得对连续信号所含的最高次谐波,能做到在一个周期内采样两次以上的话,那么经 采样后所到的脉冲列试句含了原续信的全部信息。右可能桶时理相 波器把原信号毫无失真地恢复出来, 否则采样频率过低,信息损失很多, 原信号就 不能准确复现 采样周期的选择:采样周期T越小,控制效果越好,将增加计算负担且T小到 一定程度,无多大实际意义:反之,采样周期T过大,误差较大,甚至导致整个控 制系统失去稳定。 离散信号的恢复,是在系统中加入代替理想滤波器的实际保持器来实现的。按 恒值外推规律实现的零阶保持器,由于其实现简单,且具有最小的相移,被广泛的 应用于离散控制系统中,其传递函数为 G,(s)=1-e-h 7.3Z变换与Z反变换 线性连续控制系统可用线性微分方程来描述,用拉氏变换分析它的暂态性能及 稳态性能。对于线性离散控制系统则可用线性差分方程来描述,用Z变换来分析它 的暂态性能及稳态性能。Z变换是研究离散系统主要的数学工具,由拉氏变换引导 出来,是离散信号的拉氏变换。 1.:变换定义 变换实质上是拉氏变换的一种扩展,也称作采样拉氏变换。在采样系统中 连续函数信号∫()经过采样开关,变成采样信号∫*()
106 图 7-2 采样过程 采样信号: 离散控制系统的采样定理给出了从采样的离散信号恢复到原来连续信号所必须 的最低采样频率( s 2 max )。 采样定理可叙述如下:如果采样周期满足下列条件,即 2 max s = 2 /T 或 max T / 式中 max 为连续信号 f (t) 的最高次谐波的角频率。则采样信号 f * (t) 就可以 无失真地再恢复为原连续信号 f (t) 。这就是说,如果选择的采样角频率足够高,使 得对连续信号所含的最高次谐波,能做到在一个周期内采样两次以上的话,那么经 采样后所得到的脉冲序列,就包含了原连续信号的全部信息。就有可能通过理想滤 波器把原信号毫无失真地恢复出来。否则采样频率过低,信息损失很多,原信号就 不能准确复现。 采样周期的选择:采样周期 T 越小,控制效果越好,将增加计算负担,且 T 小到 一定程度,无多大实际意义;反之,采样周期 T 过大,误差较大,甚至导致整个控 制系统失去稳定。 离散信号的恢复,是在系统中加入代替理想滤波器的实际保持器来实现的。按 恒值外推规律实现的零阶保持器,由于其实现简单,且具有最小的相移,被广泛的 应用于离散控制系统中,其传递函数为 s e G s Ts h − − = 1 ( ) 7.3 Z 变换与 Z 反变换 线性连续控制系统可用线性微分方程来描述,用拉氏变换分析它的暂态性能及 稳态性能。对于线性离散控制系统则可用线性差分方程来描述,用 Z 变换来分析它 的暂态性能及稳态性能。Z 变换是研究离散系统主要的数学工具,由拉氏变换引导 出来,是离散信号的拉氏变换。 1. z 变换定义 z 变换实质上是拉氏变换的一种扩展,也称作采样拉氏变换。在采样系统中, 连续函数信号 f (t) 经过采样开关,变成采样信号 f * (t) = = − 0 * ( ) ( ) ( ) k f t f kT t kT

∫*0=∑fk60-k切 对上式进行拉氏变换 F*o=ol-2nt (7-1) 从此式可以看出,任何采样信号的拉氏变换中,都含有超越函数如,因此,若仍 用拉氏变换处理采样系统的问题,就会给运算带来很多困难,为此,引入新变量:, 2=eh (7-2) 将F*(S)记作F(),则式(7-1)可以改写为 Fe)=∑fkT= (7-3) A=0 这样就变成了以复变量:为自变量的函数。称此函数为∫*()的:变换。记作 F()=Zf*(t] 因为:变换只对采样点上信号起作用,所以上式也可以写为 F()=Zf()] 应注意,F()是f()的:变换符号,其定义就是式(7-3),不要误以为它是f() 的拉氏变换式F()中的s以:简单置换的结果。将式(7一3)展开 F(a)=f0)z°+fT)z+f(2Tz2+.+fkTz-*+. (7-4) 可见,采样函数的:变换是变量:的幂级数。其一般项(kTz具有明确的物理意 义: 107
107 = = − 0 *( ) ( ) ( ) k f t f kT t kT 对上式进行拉氏变换 = − = = 0 *( ) £ *( ) ( ) k kTs F s f t f k T e (7-1) 从此式可以看出,任何采样信号的拉氏变换中,都含有超越函数 kTs e − ,因此,若仍 用拉氏变换处理采样系统的问题,就会给运算带来很多困难,为此,引入新变量 z , 令 z = Ts e (7-2) 则 z T s ln 1 = 将 F *(s)记作F(z) ,则式(7-1)可以改写为 = − = 0 ( ) ( ) k k F z f kT z (7-3) 这样就变成了以复变量 z 为自变量的函数。称此函数为 f * (t) 的 z 变换。记作 F(z) = Zf *(t) 因为 z 变换只对采样点上信号起作用,所以上式也可以写为 F(z) = Zf (t) 应注意, F(z) 是 f (t) 的 z 变换符号,其定义就是式(7-3),不要误以为它是 f (t) 的拉氏变换式 F(s) 中的 s 以 z 简单置换的结果。将式(7-3)展开 F(z) = f (0)z 0 + f (T)z −1 + f (2T)z −2 ++ f (k T)z −k + (7-4) 可见,采样函数的 z 变换是变量 z 的幂级数。其一般项 k f kT z − ( ) 具有明确的物理意 义:
f(kT)表示采样脉冲的幅值::的幂次表示该采样脉冲出现的时刻。因此它包 含着量值与时间的概念。 2.变换的求法 (1)用定义求 已知时函数f),则 zol=fD= k=0 展开后,根据无穷级数求和公式 a+ag+a时+品g英中M1 即可求出函数的:变换。 (②)用查表法求 若己知函数的拉氏变换(象函数),用部分分式法将其展开,查表对应即可。 3.:反变换 正如同在拉氏变换方法中一样,:变换方法的一个主要目的是要先获得时域函 数f()在:域中的代数解,其最终的时域解可通过反:变换求出。当然,F(:)的 反:变换只能求出∫*(),即只能是∫(k)。如果是理想采样器作用于连续信号 f(),则在1=kT瞬间的采样值f(kT)可以获得。:反变换可以记作 Z-[F()]=f*( (7-5) 求:反变换的方法通常有以下三种: ()部分分式展开法 (2)级数展开法(综合除法) (3)留数法 在求:反变换时,仍假定当k<0时,f(kT)=0。下面介绍最常用的两种求:反变 换的方法。 108
108 f (kT) 表示采样脉冲的幅值; z 的幂次表示该采样脉冲出现的时刻。因此它包 含着量值与时间的概念。 2. z 变换的求法 (1) 用定义求 已知时函数 f (t) ,则 = − = 0 ( ) ( ) k k Z f t f kT z 展开后,根据无穷级数求和公式 q a a aq aq − + + + = 1 2 ,其中 q 1 即可求出函数的 z 变换。 (2) 用查表法求 若已知函数的拉氏变换(象函数),用部分分式法将其展开,查表对应即可。 3. z 反变换 正如同在拉氏变换方法中一样, z 变换方法的一个主要目的是要先获得时域函 数 f (t) 在 z 域中的代数解,其最终的时域解可通过反 z 变换求出。当然, F(z) 的 反 z 变换只能求出 f * (t) ,即只能是 f (kt) 。如果是理想采样器作用于连续信号 f (t) ,则在 t = kT 瞬间的采样值 f (kT) 可以获得。 z 反变换可以记作 ( ) *( ) 1 Z F z = f t − (7-5) 求 z 反变换的方法通常有以下三种: (1) 部分分式展开法 (2) 级数展开法(综合除法) (3) 留数法 在求 z 反变换时,仍假定当 k 0 时, f (kT) = 0 。下面介绍最常用的两种求 z 反变 换的方法
(1)部分分式展开法 此法是将F()通过部分分式分解为低阶的分式之和,直接从:变换表中求出各项对 应的:反变换,然后相加得到∫(kT刀)。 7.4脉冲传递函数 1.脉冲传递函数的定义 零初始条件下,线性定常离散系统输出的:变换与输入的:变换之比,称为脉 冲传递函数。 2.串联环节的脉冲传递函数 假定输出变量前有采样开关(或有一理想的虚拟采样开关),或者输入变量后有 采样开关。则我们分析下面二种情况: (1)二串联环节间有采样开关 图7-3(a)所示两个串联环节间有采样器隔开,所以有 U(z)=G()R() (7-6) C(=)=G2(U,() (7-7) 式中G,(:)、G,(:)分别为线性环节G,(S)、G,(S)的脉冲传递函数,即 G()=ZG(s小,G,()=ZG(s小,则由式(7-6)和(7-7)可得 C(=G()G(R( 所以,图7-3(a)所示系统的脉冲传递函数为 ce-Q-Gec, R() 可见,两个环节间有采样器隔开时,则环节串联等效脉冲传递函数为两个环节的脉 冲传递函数的乘积。同理,n个环节串联,且所有环节之间均有采样器隔开时,则 等效脉冲传递函数为所有环节的脉冲传递函数的乘积。即 G)=G,(a)G2(a).Gn(a) (7-8) 109
109 (1) 部分分式展开法 此法是将 F(z) 通过部分分式分解为低阶的分式之和,直接从 z 变换表中求出各项对 应的 z 反变换,然后相加得到 f (kT) 。 7.4 脉冲传递函数 1.脉冲传递函数的定义 零初始条件下,线性定常离散系统输出的 z 变换与输入的 z 变换之比,称为脉 冲传递函数。 2.串联环节的脉冲传递函数 假定输出变量前有采样开关(或有一理想的虚拟采样开关),或者输入变量后有 采样开关。则我们分析下面二种情况: (1) 二串联环节间有采样开关 图 7-3(a)所示两个串联环节间有采样器隔开,所以有 ( ) ( ) ( ) (7 7) ( ) ( ) ( ) (7 6) 2 1 1 1 = − = − C z G z U z U z G z R z 式中 ( ) 1 G z 、 ( ) 2 G z 分别为线性环节 ( ) 1 G s 、 ( ) 2 G s 的脉冲传递函数,即 ( ) ( ) 1 1 G z = Z G s , ( ) ( ) 2 2 G z = Z G s ,则由式(7-6)和(7-7)可得 ( ) ( ) ( ) ( ) 1 2 C z = G z G z R z 所以,图 7-3(a)所示系统的脉冲传递函数为 ( ) ( ) ( ) ( ) ( ) 1 2 G z G z R z C z G z = = 可见,两个环节间有采样器隔开时,则环节串联等效脉冲传递函数为两个环节的脉 冲传递函数的乘积。同理, n 个环节串联,且所有环节之间均有采样器隔开时,则 等效脉冲传递函数为所有环节的脉冲传递函数的乘积。即 ( ) ( ) ( ) ( ) 1 2 G z G z G z G z n = (7-8)