自动控制理论 第八章非线性控制系统 新疆大学电气工程学院 第八章非线性控制系统 2025/114
1 第八章 非线性控制系统 2025/1/14 第八章非线性控制系统 新疆大学 电气工程学院 自动控制理论
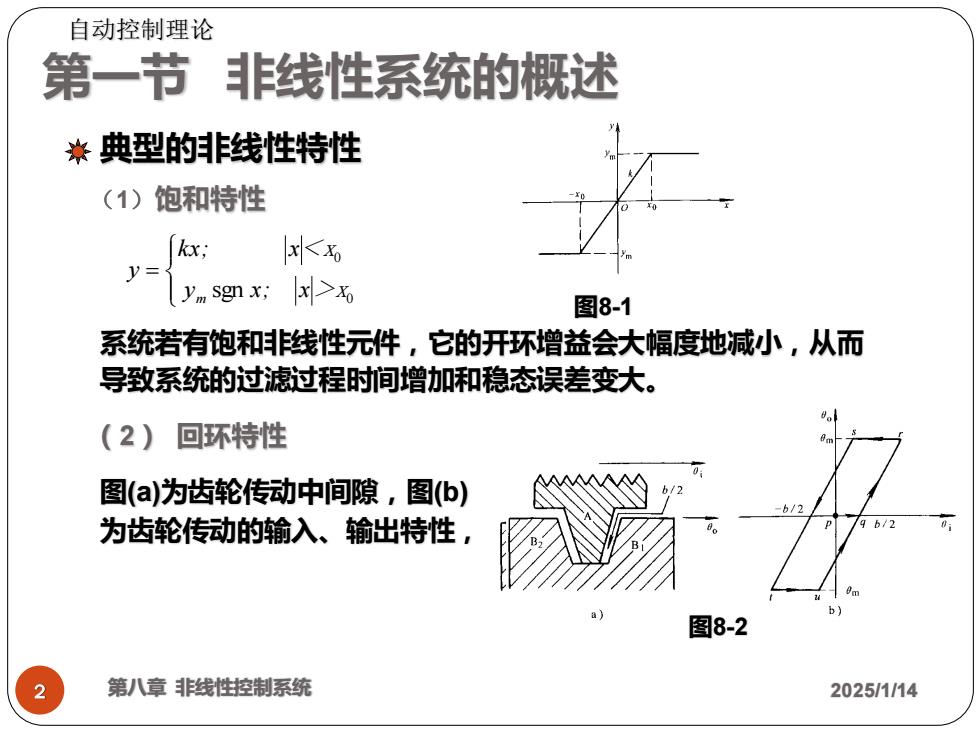
自动控制理论 第一节非线性系统的概述 米典型的非线性特性 (1)饱和特性 kx; 长6 y y sgn x; x>x 图8-1 系统若有饱和非线性元件,它的开环增益会大幅度地减小,从而 导致系统的过滤过程时间增加和稳态误差变大。 (2)回环特性 图(a)为齿轮传动中间隙,图(b) 为齿轮传动的输入、输出特性, b/1 图8-2 2 第八章非线性控制系统 2025/1/14
第一节 非线性系统的概述 2 第八章 非线性控制系统 2025/1/14 典型的非线性特性 (1)饱和特性 = y x; x>x kx; x<x y m 0 0 sgn 系统若有饱和非线性元件,它的开环增益会大幅度地减小,从而 导致系统的过滤过程时间增加和稳态误差变大。 (2) 回环特性 图8-1 图8-2 图(a)为齿轮传动中间隙,图(b) 为齿轮传动的输入、输出特性, 自动控制理论
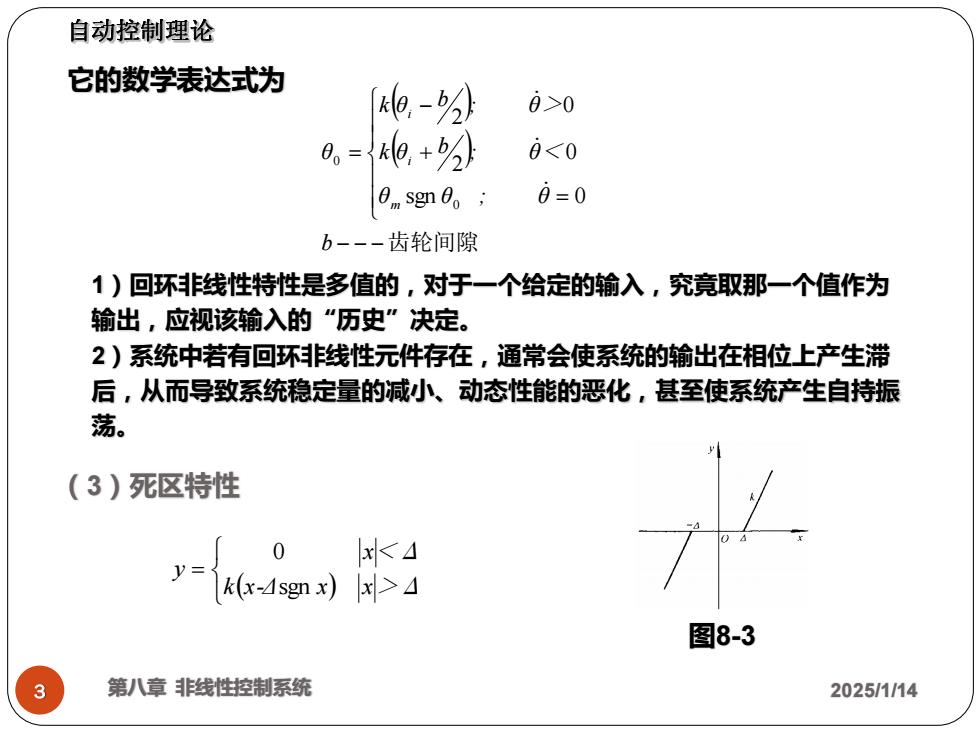
自动控制理论 它的数学表达式为 0,-5 0>0 0。= 阳,+分 8<0 0msgn0。; 0=0 b-齿轮间隙 1)回环非线性特性是多值的,对于一个给定的输入,究竟取那一个值作为 输出,应视该输入的“历史”决定。 2)系统中若有回环非线性元件存在,通常会使系统的输出在相位上产生滞 后,从而导致系统稳定量的减小、动态性能的恶化,甚至使系统产生自持振 荡。 (3)死区特性 0 A y= k(x-4sgn x) 图8-3 3 第八章非线性控制系统 2025/1/14
3 第八章 非线性控制系统 2025/1/14 它的数学表达式为 ( ) ( ) − − −齿轮间隙 = + − = b θ θ ; θ k θ b ; θ< k θ b ; θ> θ m i i sgn 0 0 2 0 2 0 0 1)回环非线性特性是多值的,对于一个给定的输入,究竟取那一个值作为 输出,应视该输入的“历史”决定。 2)系统中若有回环非线性元件存在,通常会使系统的输出在相位上产生滞 后,从而导致系统稳定量的减小、动态性能的恶化,甚至使系统产生自持振 荡。 (3)死区特性 ( ) = k x -Δ x x>Δ x<Δ y sgn 0 图8-3 自动控制理论
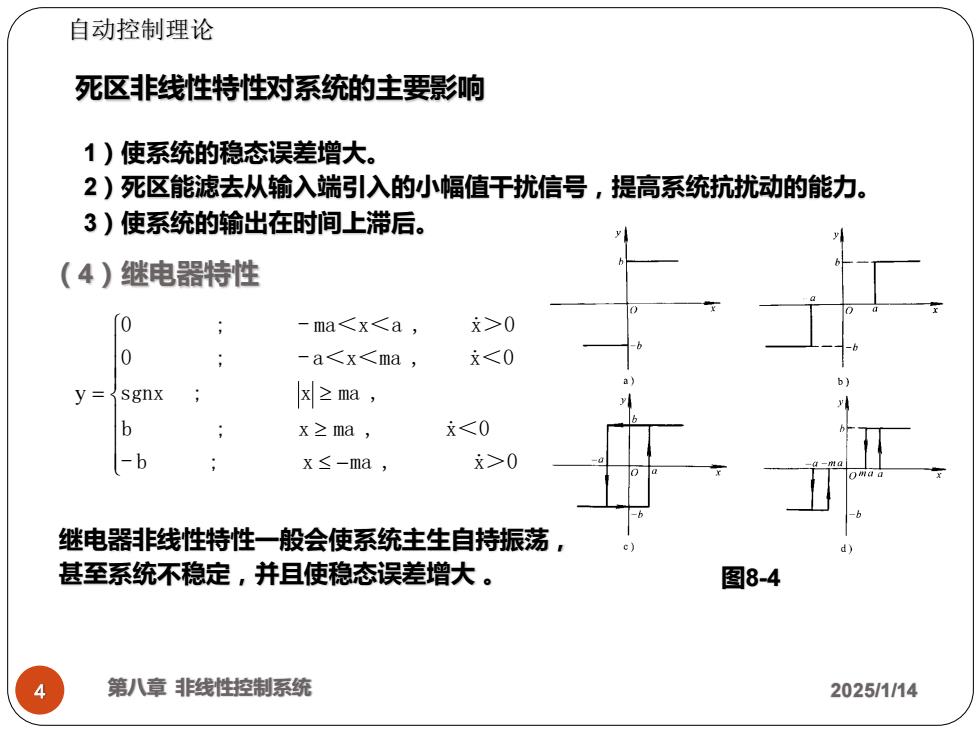
自动控制理论 死区非线性特性对系统的主要影响 1)使系统的稳态误差增大。 2)死区能滤去从输入端引入的小幅值干扰信号,提高系统抗扰动的能力。 3)使系统的输出在时间上滞后。 (4)继电器特性 0 -ma<x<a, x>0 0 -a<x<ma x<0 y= sgnx x≥ma, b x≥ma, x<0 6 x≤-ma, x>0 继电器非线性特性一般会使系统主生自持振荡, 甚至系统不稳定,并且使稳态误差增大。 图8-4 第八章非线性控制系统 2025/1/14
4 第八章 非线性控制系统 2025/1/14 1)使系统的稳态误差增大。 2)死区能滤去从输入端引入的小幅值干扰信号,提高系统抗扰动的能力。 3)使系统的输出在时间上滞后。 死区非线性特性对系统的主要影响 (4)继电器特性 图8-4 − = - b ; x ma , x>0 b ; x ma , x<0 sgnx ; x ma , 0 ; - a<x<ma , x<0 0 ; - ma<x<a , x>0 y 继电器非线性特性一般会使系统主生自持振荡, 甚至系统不稳定,并且使稳态误差增大 。 自动控制理论
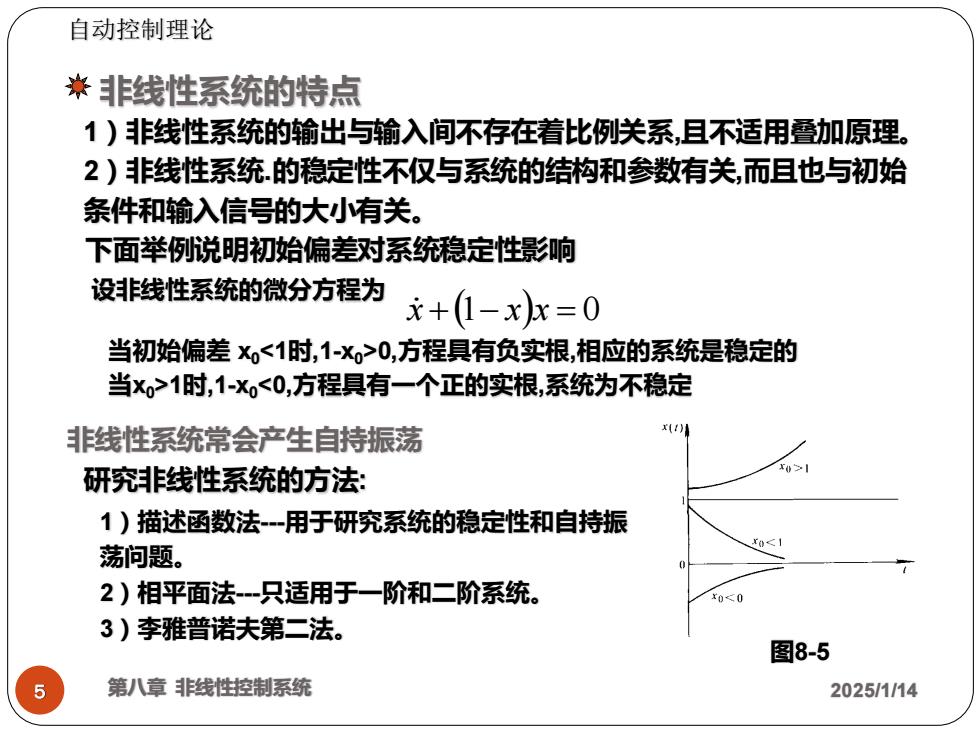
自动控制理论 嶚非线性系统的特点 1)非线性系统的输出与输入间不存在着比例关系,且不适用叠加原理 2)非线性系统的稳定性不仅与系统的结构和参数有关,而且也与初始 条件和输入信号的大小有关。 下面举例说明初始偏差对系统稳定性影响 设非线性系统的微分方程为 +1-x)x=0 当初始偏差X<1时,1-X>0,方程具有负实根,相应的系统是稳定的 当x0>1时,1-X<0,方程具有一个正的实根,系统为不稳定 非线性系统常会产生自持振荡 研究非线性系统的方法: 1)描述函数法-一用于研究系统的稳定性和自持振 荡问题。 2)相平面法-只适用于一阶和二阶系统。 3)李雅普诺夫第二法。 图8-5 5 第八章非线性控制系统 2025/1/14
5 第八章 非线性控制系统 2025/1/14 x +(1− x)x = 0 非线性系统的特点 1)非线性系统的输出与输入间不存在着比例关系,且不适用叠加原理。 2)非线性系统.的稳定性不仅与系统的结构和参数有关,而且也与初始 条件和输入信号的大小有关。 下面举例说明初始偏差对系统稳定性影响 设非线性系统的微分方程为 当初始偏差 x0<1时,1-x0>0,方程具有负实根,相应的系统是稳定的 当x0>1时,1-x0<0,方程具有一个正的实根,系统为不稳定 图8-5 非线性系统常会产生自持振荡 1)描述函数法-用于研究系统的稳定性和自持振 荡问题。 2)相平面法-只适用于一阶和二阶系统。 3)李雅普诺夫第二法。 研究非线性系统的方法: 自动控制理论