自动控制理论 第六章控制系统的校正 新疆大学电气工程学院
第六章控制系统的校正 新疆大学 电气工程学院 自动控制理论
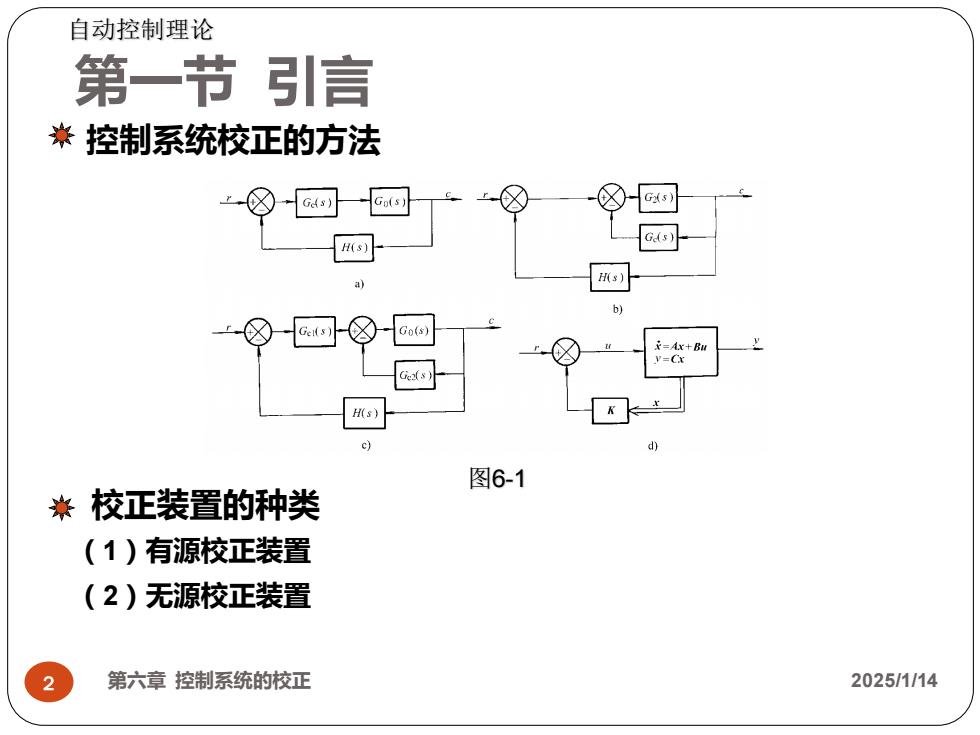
自动控制理论 第一节引言 嶚控制系统校正的方法 -Go(s) Hs) (s) Ax+Bu H(s 图6-1 *校正装置的种类 (1)有源校正装置 (2)无源校正装置 第六章控制系统的校正 2025/1/14
第一节 引言 2 第六章 控制系统的校正 2025/1/14 自动控制理论 控制系统校正的方法 图6-1 校正装置的种类 (1)有源校正装置 (2)无源校正装置
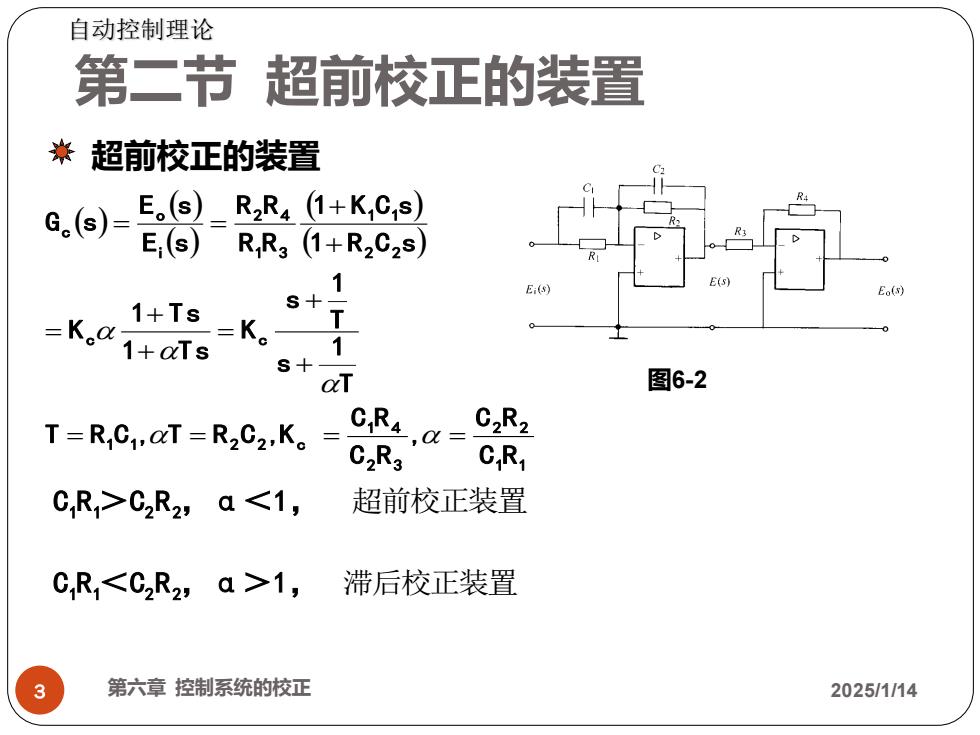
自动控制理论 第二节超前校正的装置 超前校正的装置 G.s)-5,@)_RR1+Kc,) E;(s)R,R3 (1+R2C2s) 1 S+ =K. 1+Ts 1+aTs 1 S+ aT 图6-2 T=R,C,aT=R,C2,K。= ,C= C2R3 C,R>CR2,a<1, 超前校正装置 CR1<C2R2,a>1, 滞后校正装置 第六章控制系统的校正 2025/1/14
第二节 超前校正的装置 3 第六章 控制系统的校正 2025/1/14 ( ) ( ) ( ) ( ) ( ) 1 1 2 2 2 3 1 4 1 1 2 2 c c c 2 2 1 1 1 3 2 4 i o c C R C R , C R C R T R C , T R C ,K T 1 s T 1 s K 1 T s 1 T s K 1 R C s 1 K C s R R R R E s E s G s = = = = + + = + + = + + = = 超前校正的装置 图6-2 自动控制理论 C1 R1<C2 R2,α>1, 滞后校正装置 C1 R1>C2 R2,α<1, 超前校正装置
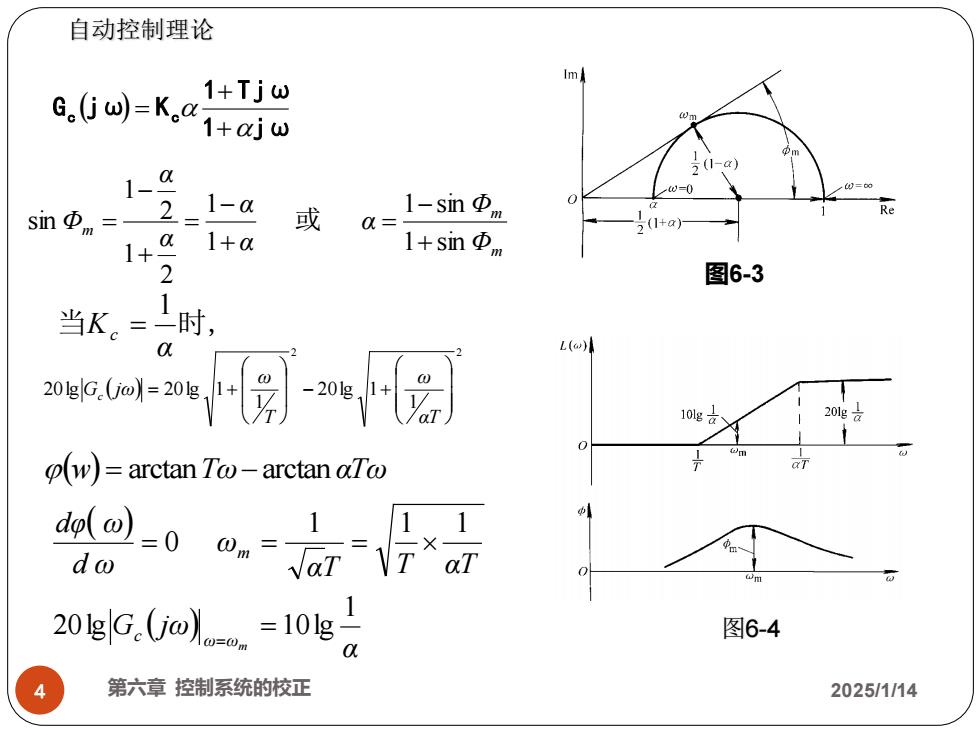
自动控制理论 G.(jw)-K. 1+Tjw 1+0jw 1- sin r=2 1-0 或 1-sinΦm d= (1+a) 1+0 1+ 1+sinΦm 2 图6-3 当K=时, O L() 20gG.Uo=20g,1+ 101g 201g o(w)=arctan To-arctan aTo dol)=0 1 @m= 11 dw 20g1G.0oa.=101g2 图6-4 第六章控制系统的校正 2025/1/14
4 第六章 控制系统的校正 2025/1/14 ( ) 1 jω 1 Tjω Gc jω Kc + + = 图6-3 m m m Φ Φ α α α α α Φ 1 sin 1 sin 1 1 2 1 2 1 sin + − = + − = + − = 或 当 时, α Kc 1 = ( ) 2 2 1 20lg 1 1 20lg 20lg 1 − + = + αT ω T ω Gc jω (w) = arctanTω−arctan αTω 自动控制理论 ( ) ( ) α G jω αT T αT ω d ω dφ ω ω ωm c m 1 20lg 10lg 1 1 1 0 = = = = = 图6-4
自动控制理论 涤基于频率响应法的超前校正 刚6-2已知G,同)s6+2 4 ,要求校正后系统的静态速度误差 系数Kv=20s-1,=50°,20lgKg=10dB 解: 令G.)=Ka1+西 =K 1+Ts 1+aTs 1+aTs 1)调整开环增益K,满足K的要求 校正前开环传递函数为 G)=KG,6)= 4K s(s+2) s4K K=lim =2K=20,K=10 50s5+2) 校正前系统的开环频率特性为 G,jw)-jo(jo+2) 40 20 J1+四) 5 第六章控制系统的校正 2025/1/14
5 第六章 控制系统的校正 2025/1/14 基于频率响应法的超前校正 例6-2 已知 ( ) s(s 2) 4 G0 s + = 系数Kv=20s-1 ,r=50° ,20lgKg=10dB 解: ( ) Ts Ts K Ts Ts Gc s Kc + + = + + = 1 1 1 1 令 自动控制理论 ,要求校正后系统的静态速度误差 1)调整开环增益K,满足Kv的要求 校正前开环传递函数为 ( ) ( ) ( 2) 4 1 0 + = = s s K G s KG s ( ) 2 20 10 2 4 lim 0 = = = + = → K , K s s s K K s v 校正前系统的开环频率特性为 ( ) ( ) + = + = 2 1 20 2 40 1 jω jω jω jω G jω