自动控制理论 第三章控制系统的时域分析 新腰大学电气工程学院
第三章控制系统的时域分析 新疆大学电气工程学院 自动控制理论
自动控制理论 第一节典型的试验信号 染典型的试验信号一般应具备两个条件 (1)信号的数学表达式要简单 (2)信号易于在实验室中获得 一、 阶跃输入 t<0 t≥0 图3-1 式中,R,=常量。R,=山,则称为单位阶跃信号,它的拉氏变换为RS)= 第三章控制系统的时域分析 2025/1/14
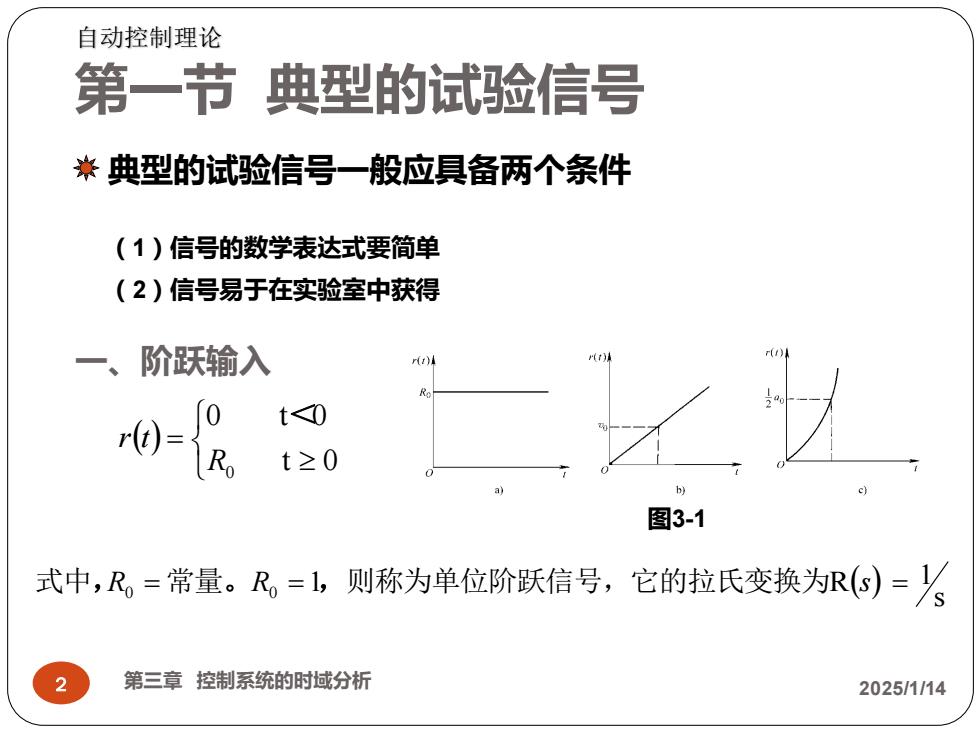
第一节 典型的试验信号 典型的试验信号一般应具备两个条件 ( ) s 1 R 1 式中,R0 = 常量。R0 = ,则称为单位阶跃信号,它的拉氏变换为 s = 2 第三章 控制系统的时域分析 2025/1/14 自动控制理论 (1)信号的数学表达式要简单 (2)信号易于在实验室中获得 一、阶跃输入 图3-1 ( ) = t 0 0 t 0 R0 r t <
自动控制理论 二、斜坡信号 0)= vot t≥0 t<0 若。=1,称为单位斜坡信号,拉氏变换为%: 三、等加速度信号 等加速度信号是一种抛物线函数,其数学表达式为 01 t<0 r0)= 1 t≥0 a,=常数,若a,=山称为单位等加速度信号,拉氏变换为 3 第三章控制系统的时域分析 2025/1/14
3 第三章 控制系统的时域分析 2025/1/14 0 2 1 1 s 若v = ,称为单位斜坡信号,拉氏变换为 0 0 3 a a 1 1 s = 常数,若 = ,称为单位等加速度信号,拉氏变换为 自动控制理论 三、等加速度信号 等加速度信号是一种抛物线函数,其数学表达式为 ( ) = a t t 0 2 1 t 0 2 0 1 < r t 二、斜坡信号 ( ) = t 0 0 t 0 < v t r t
自动控制理论 四、脉冲信号 r() r(1)米 6(t) t<0 0<t<8 b) 图3-2 当H=时,记为5()若ε→o,则称5(d为单位理想脉冲 函数,并用5)表示之 五、正弦信号 r(t)=Asin ot 第三章控制系统的时域分析 2025/1/14
4 第三章 控制系统的时域分析 2025/1/14 ( ) ( ) 函数,并用 ( )表示之 当 时,记为 ,若 ,则称 为单位理想脉冲 t t t H = 1 → r(t) = Asint 五、正弦信号 自动控制理论 四、脉冲信号 图3-2 ( ) = < < < H t t 0 r t
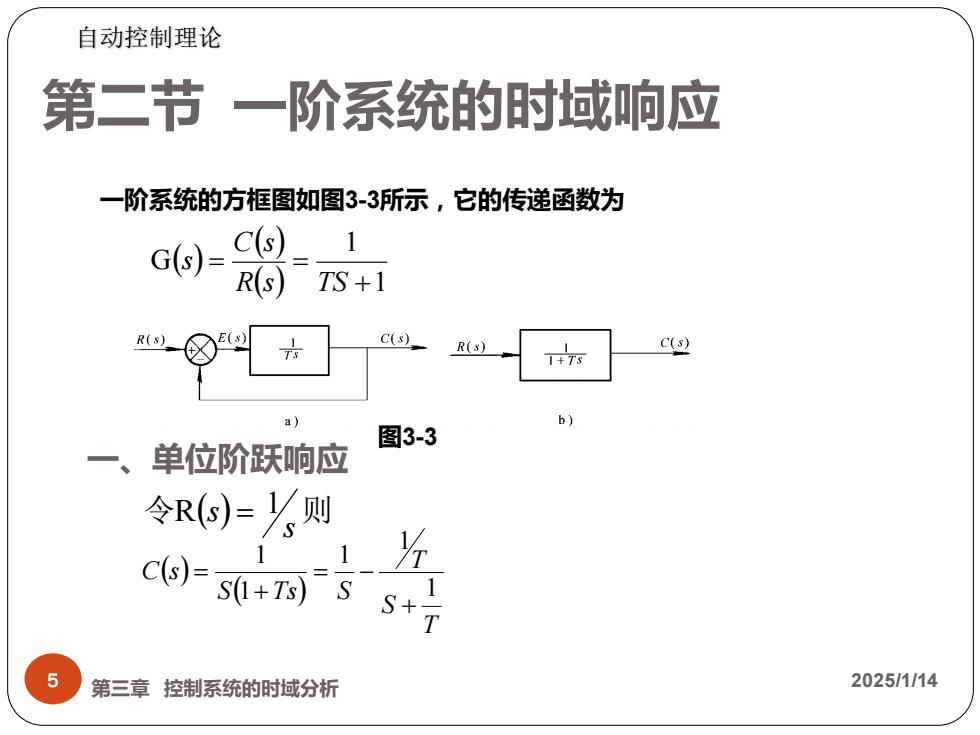
自动控制理论 第二节一阶系统的时域响应 一阶系统的方框图如图3-3所标,它的传递函数为 G6)= C(s) 1 R(s) TS+1 c(s) R(s) C(s) a) 图3-3 单位阶跃响应 令R6)=则 1 C(s)=s(1+7s)s S*T 5 第三章控制系统的时域分析 2025/1/14
第二节 一阶系统的时域响应 ( ) ( ) ( ) 1 1 G + = = R s TS C s s 5 第三章 控制系统的时域分析 2025/1/14 一阶系统的方框图如图3-3所示,它的传递函数为 图3-3 自动控制理论 一、单位阶跃响应 令 ( ) 则s R s = 1 ( ) ( ) T S T S Ts S C s 1 1 1 1 1 + = − + =