第二章自动控制系统的数学模型 研究一个自动控制系统,除了对系统进行定性分析外,还必须进行定量分析,进而探时 改善系统稳态和动态性能的具体方法。控制系统的运动方程式(也叫数学模型)是根据系统 的动态特性,即通过决定系统特征的物理学定律,如机械、电气、热力、液压、气动等方面 的基本定律而写成的。它代表系统在运动过程中各变量之间的相互关系,既定性又定量地 描述了整个系统的动态过程。因此,要分析和研究一个控制系统的动态特性,就必须列写该 系统的运动方程式,即数学模型。 2.1系统动态徹分方程模型 常用的列写系统或环节的动态微分方程式的方法有两种:一种是机理分析法,即根据各 环节所遵循的物理规律(如力学、电磁学、运动学、热学等)来编写。另一种方法是实验辮 识法,即根据实验数据进行整理编写。在实际工作中,这两种方法是相辅相成的,由于机西 分析法是基本的常用方法,本节着重讨论这种方法 下面通过简单示例介绍机理分析法的一般步骤。 [例2-1]列写图2-1所示LC网络的微分方程。 解1.明确输入、输出量 u i 网络的输入量为电压4,(),输出量为电压4() 2.列出原始微分方程式。根据电路理论得 图2-1LC网络 u0=t+2oh+0 (2-1) 而 4.0=0 (2-2) 式中)为网络电流,是除输入、输出量之外的中间变量。 3.消去中间变量 将式(2-2)两边求导,得 (2-3) dt 代入式(2-1)整理为 LC产u,0+Rc恤,0+u0=4,0 (2-4) dt 显然,这是一个二阶线性微分方程,也就是2-1所示LC无源网络的数学模型。 [例2-2】试列写图2-2所示电枢控制直流电动机的微分方程,要求取电枢电压u()(W) 为输入量,电动机转速o()(ds)为输出量。图中R。(@)、L。(H)分别是电枢电路的 电阻和电感,M。(N·m)是折合到电动机轴上的总负载转矩。激磁磁通为常值 解电枢控制直流电动机是控制系统中常用的执行机构或控制对象,其工作实质是将输 入的电能转换为机械能,也就是由输入的电枢电压()在电枢回路中产生电枢电流1,()
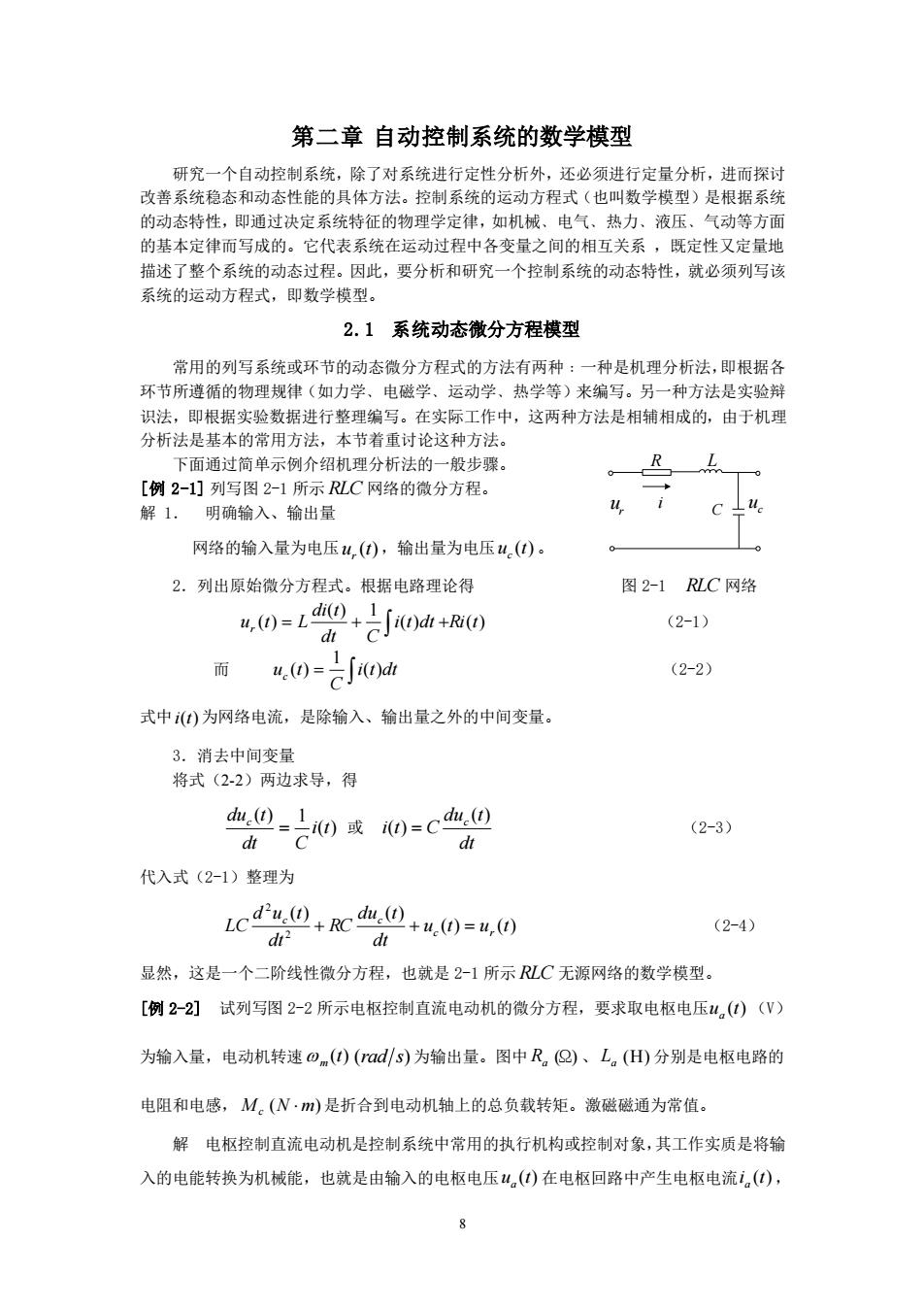
8 第二章 自动控制系统的数学模型 研究一个自动控制系统,除了对系统进行定性分析外,还必须进行定量分析,进而探讨 改善系统稳态和动态性能的具体方法。控制系统的运动方程式(也叫数学模型)是根据系统 的动态特性,即通过决定系统特征的物理学定律,如机械﹑电气﹑热力﹑液压﹑气动等方面 的基本定律而写成的。它代表系统在运动过程中各变量之间的相互关系 ,既定性又定量地 描述了整个系统的动态过程。因此,要分析和研究一个控制系统的动态特性,就必须列写该 系统的运动方程式,即数学模型。 2.1 系统动态微分方程模型 常用的列写系统或环节的动态微分方程式的方法有两种﹕一种是机理分析法,即根据各 环节所遵循的物理规律(如力学﹑电磁学﹑运动学﹑热学等)来编写。另一种方法是实验辩 识法,即根据实验数据进行整理编写。在实际工作中,这两种方法是相辅相成的,由于机理 分析法是基本的常用方法,本节着重讨论这种方法。 下面通过简单示例介绍机理分析法的一般步骤。 [例 2-1] 列写图 2-1 所示 RLC 网络的微分方程。 解 1. 明确输入、输出量 网络的输入量为电压 u (t) r ,输出量为电压 u (t) c 。 2.列出原始微分方程式。根据电路理论得 图 2-1 RLC 网络 ( ) ( ) ( ) 1 ( ) i t dt Ri t dt C di t ur t L = + + (2-1) 而 = i t dt C u t c ( ) 1 ( ) (2-2) 式中 i(t) 为网络电流,是除输入、输出量之外的中间变量。 3.消去中间变量 将式(2-2)两边求导,得 ( ) ( ) 1 i t dt C du t c = 或 dt du t i t C c ( ) ( ) = (2-3) 代入式(2-1)整理为 ( ) ( ) ( ) ( ) 2 2 u t u t dt du t RC dt d u t LC c r c c + + = (2-4) 显然,这是一个二阶线性微分方程,也就是 2-1 所示 RLC 无源网络的数学模型。 [例 2-2] 试列写图 2-2 所示电枢控制直流电动机的微分方程,要求取电枢电压 u (t) a (V) 为输入量,电动机转速 (t) m (rad s) 为输出量。图中 Ra (Ω) 、 La (H) 分别是电枢电路的 电阻和电感, Mc (N m) 是折合到电动机轴上的总负载转矩。激磁磁通为常值。 解 电枢控制直流电动机是控制系统中常用的执行机构或控制对象,其工作实质是将输 入的电能转换为机械能,也就是由输入的电枢电压 u (t) a 在电枢回路中产生电枢电流 i (t) a , R L ur uc i C
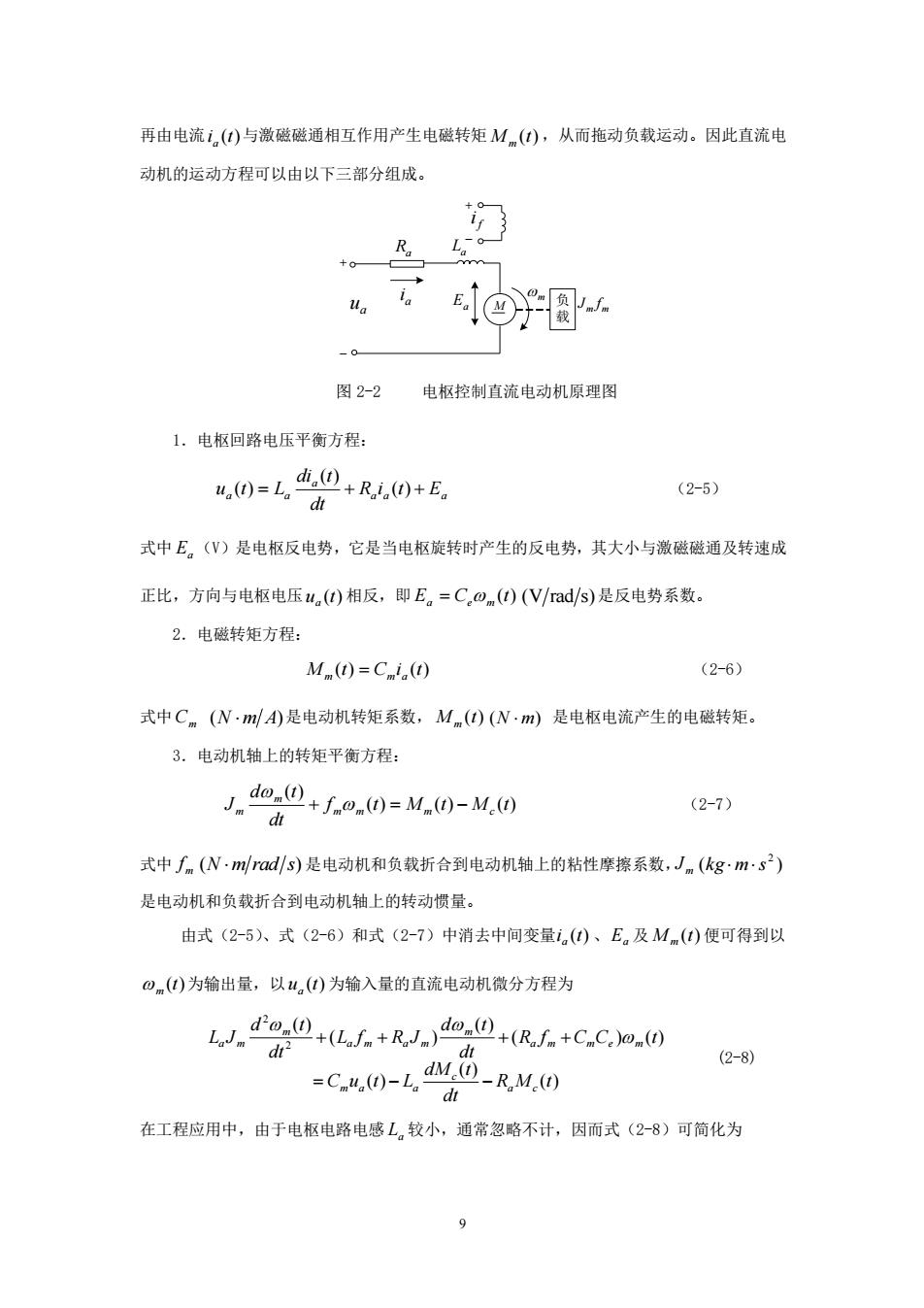
再由电流,()与激磁磁通相互作用产生电磁转矩M(),从而拖动负载运动。因此直流电 动机的运动方程可以由以下三部分组成。 R -9 图2-2电枢控制直流电动机原理图 1.电枢回路电压平衡方程 M0=L,0+R.0+E。 (2-5) 式中E。()是电枢反电势,它是当电枢旋转时产生的反电势,其大小与激磁磁通及转速成 正比,方向与电枢电压u()相反,即E。=Co()(Vrad/s)是反电势系数 2.电磁转矩方程: M.(t)=Ci(t) (2-6) 式中C。(N·m4)是电动机转矩系数,M()(Nm)是电枢电流产生的电磁转矩。 3.电动机轴上的转矩平衡方程: 1.a0+a.0=M.0-M0 (2-7) 式中fm(N·mjrad/s)是电动机和负载折合到电动机轴上的粘性摩擦系数,Jm(kgm·s2) 是电动机和负载折合到电动机轴上的转动惯量。 由式(2-5)、式(2-6)和式(2-7)中消去中间变量i,)、E。及M()便可得到以 0()为输出量,以4,)为输入量的直流电动机微分方程为 LJ-do(+(L/+RJ-)do-()+(R/-+C.C.w-) d =C0-L,白-尺Mm (2-8) 在工程应用中,由于电枢电路电感L较小,通常忽略不计,因而式(2-8)可简化为 9
9 再由电流 i (t) a 与激磁磁通相互作用产生电磁转矩 M (t) m ,从而拖动负载运动。因此直流电 动机的运动方程可以由以下三部分组成。 图 2-2 电枢控制直流电动机原理图 1.电枢回路电压平衡方程: a a a a a a R i t E dt di t u t = L + ( ) + ( ) ( ) (2-5) 式中 Ea (V)是电枢反电势,它是当电枢旋转时产生的反电势,其大小与激磁磁通及转速成 正比,方向与电枢电压 u (t) a 相反,即 E C (t) a = e m (V rad s) 是反电势系数。 2.电磁转矩方程: M (t) C i (t) m = m a (2-6) 式中 Cm (N m A) 是电动机转矩系数, M (t) m (N m) 是电枢电流产生的电磁转矩。 3.电动机轴上的转矩平衡方程: ( ) ( ) ( ) ( ) f t M t M t dt d t J m m m c m m + = − (2-7) 式中 m f (N m rad s) 是电动机和负载折合到电动机轴上的粘性摩擦系数, m J ( ) 2 kg ms 是电动机和负载折合到电动机轴上的转动惯量。 由式(2-5)、式(2-6)和式(2-7)中消去中间变量 i (t) a 、Ea 及 M (t) m 便可得到以 (t) m 为输出量,以 u (t) a 为输入量的直流电动机微分方程为 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 2 2 R M t dt dM t C u t L R f C C t dt d t L f R J dt d t L J a c c m a a a m m e m m a m a m m a m = − − + + + + (2-8) 在工程应用中,由于电枢电路电感 La 较小,通常忽略不计,因而式(2-8)可简化为 Ra La ua a i Ea M + + _ _ f i 负 载 m m J f m
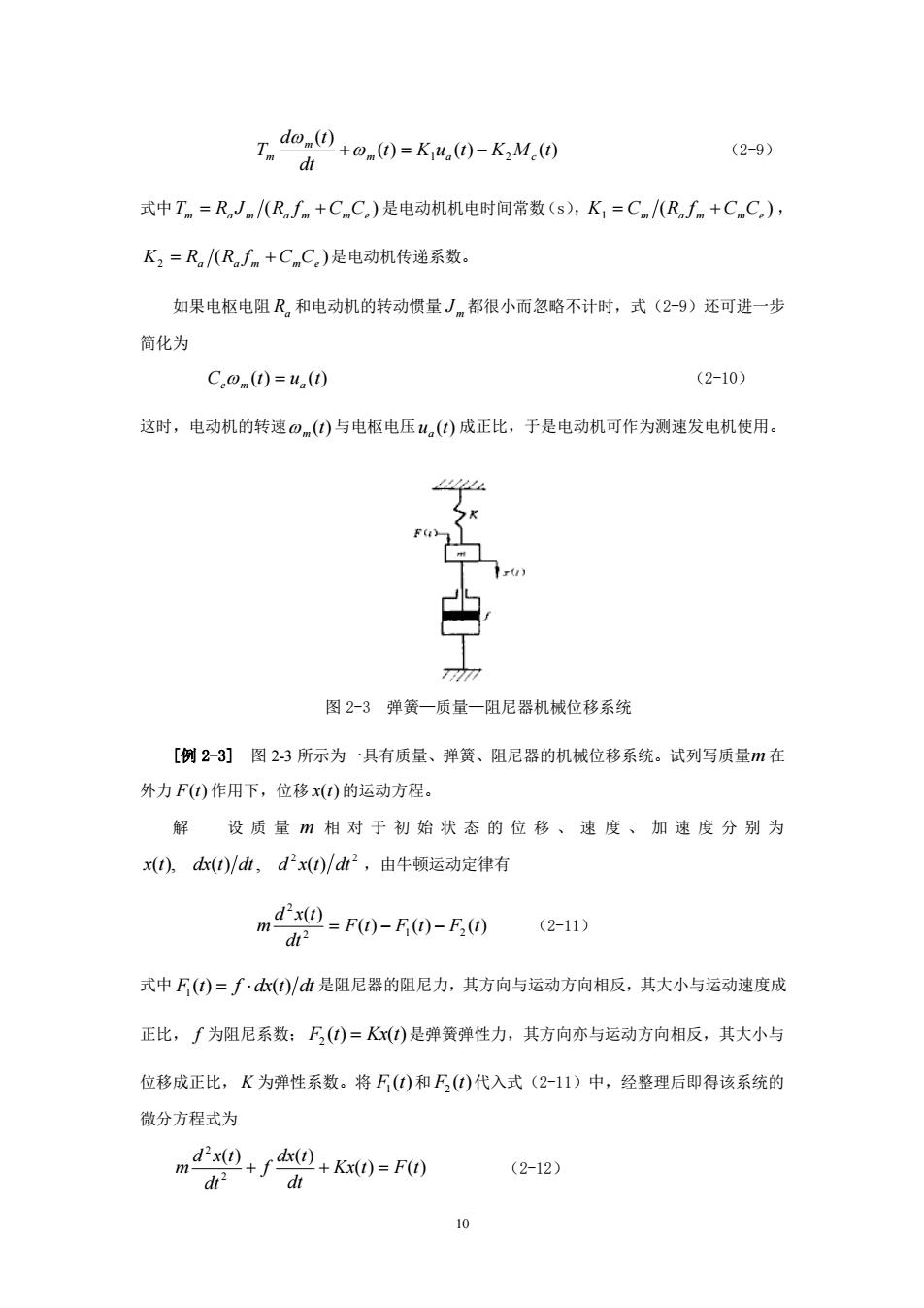
7.o,9+a.0=Ku.0-kM.0 (2-9) dt 式中Tm=R。Jm/(R∫n+CmC.)是电动机机电时间常数(s),K,=Cm/(RJm+CmC.), K2=R/(R∫m+CC,)是电动机传递系数。 如果电枢电阻R和电动机的转动惯量J都很小而忽略不计时,式(2-9)还可进一步 简化为 C.om())=4.() (2-10) 这时,电动机的转速()与电枢电压u①成正比,于是电动机可作为测速发电机使用。 图2-3弹簧一质量一阻尼器机械位移系统 [例2-3]图2-3所示为一具有质量、弹簧、阻尼器的机械位移系统。试列写质量m在 外力F()作用下,位移x()的运动方程。 解设质量m相对于初始状态的位移、速度、加速度分别为 x(),d()/d山,d2x)/d2,由牛顿运动定律有 mF)-5()-F() (2-11) dt 式中F()=f·d()/山是阻尼器的阻尼力,其方向与运动方向相反,其大小与运动速度成 正比,∫为阻尼系数:F()=K(t)是弹簧弹性力,其方向亦与运动方向相反,其大小与 位移成正比,K为弹性系数。将F()和F()代入式(2-11)中,经整理后即得该系统的 微分方程式为 n+/0,0=o (2-12)
10 ( ) ( ) ( ) ( ) 1 2 t K u t K M t dt d t T m a c m m + = − (2-9) 式中 ( ) m a m a m CmCe T = R J R f + 是电动机机电时间常数(s), ( ) 1 m a m CmCe K = C R f + , ( ) 2 a a m CmCe K = R R f + 是电动机传递系数。 如果电枢电阻 Ra 和电动机的转动惯量 m J 都很小而忽略不计时,式(2-9)还可进一步 简化为 C (t) u (t) e m = a (2-10) 这时,电动机的转速 (t) m 与电枢电压 u (t) a 成正比,于是电动机可作为测速发电机使用。 图 2-3 弹簧—质量—阻尼器机械位移系统 [例 2-3] 图 2-3 所示为一具有质量、弹簧、阻尼器的机械位移系统。试列写质量 m 在 外力 F(t) 作用下,位移 x(t) 的运动方程。 解 设质量 m 相对于初始状态的位移、速度、加速度分别为 2 2 x(t), dx(t) dt , d x(t) dt ,由牛顿运动定律有 ( ) ( ) ( ) ( ) 2 1 2 2 F t F t F t dt d x t m = − − (2-11) 式中 F (t) f dx(t) dt 1 = 是阻尼器的阻尼力,其方向与运动方向相反,其大小与运动速度成 正比, f 为阻尼系数; ( ) ( ) 2 F t = Kx t 是弹簧弹性力,其方向亦与运动方向相反,其大小与 位移成正比, K 为弹性系数。将 ( ) 1 F t 和 ( ) 2 F t 代入式(2-11)中,经整理后即得该系统的 微分方程式为 ( ) ( ) ( ) ( ) 2 2 Kx t F t dt dx t f dt d x t m + + = (2-12)
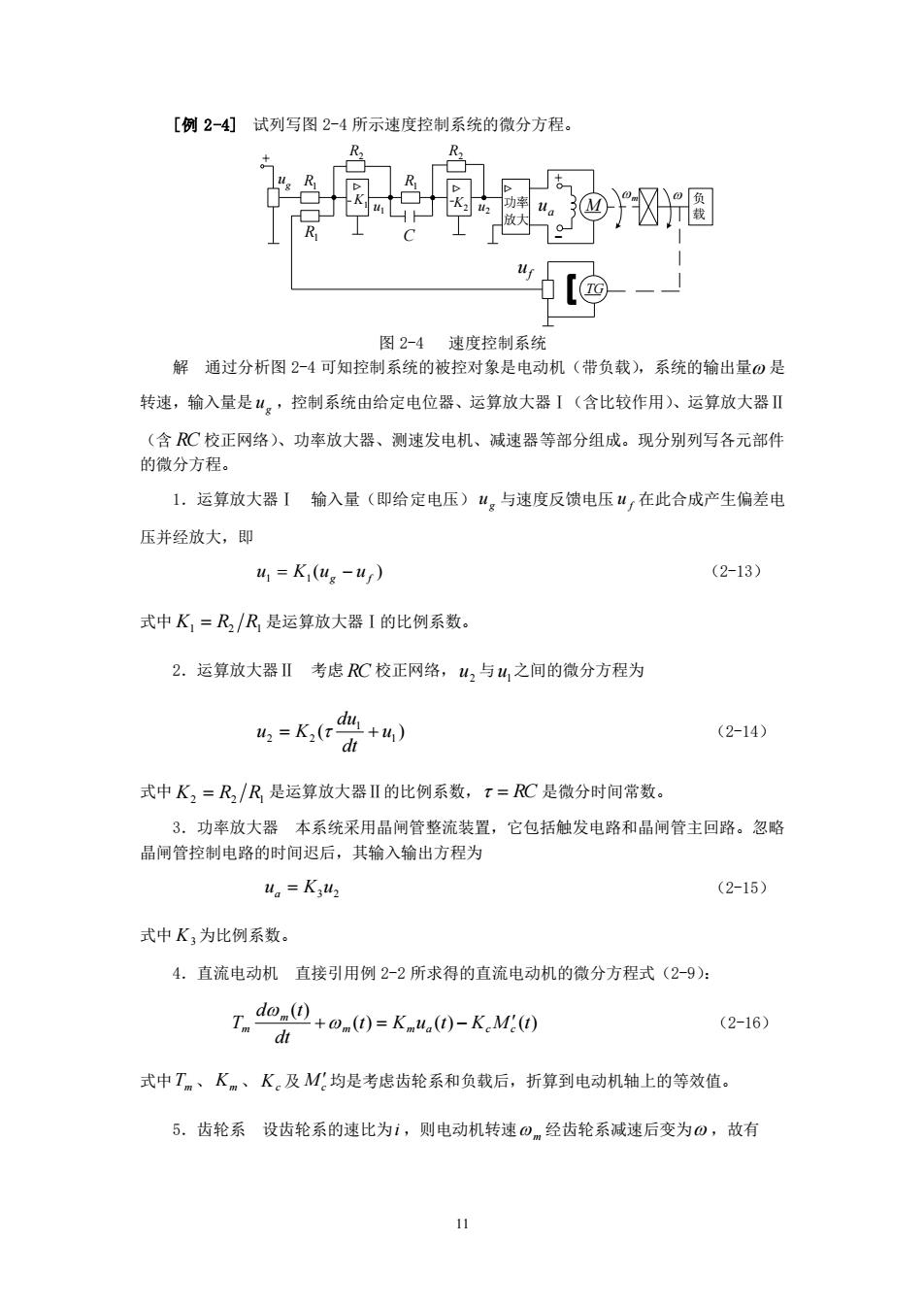
[例2-4]试列写图2-4所示速度控制系统的微分方程。 R 图2-4速度控制系统 解通过分析图2-4可知控制系统的被控对象是电动机(带负载),系统的输出量0是 转速,输入量是私。,控制系统由给定电位器、运算放大器I(含比较作用)入、运算放大器Ⅱ (含RC校正网络)、功率放大器、测速发电机、减速器等部分组成。现分别列写各元部件 的微分方程。 1,运算放大器【输入量(即给定电压)4,与速度反馈电压“,在此合成产生偏差电 压并经放大,即 4=K,(ug-4y) (2-13) 式中K,=R2/R是运算放大器I的比例系数。 2.运算放大器Ⅱ考虑RC校正网络,山2与4之间的微分方程为 出=K岛+4) (2-14) 式中K2=R/R是运算放大器Ⅱ的比例系数,T=RC是微分时间常数。 3。功率放大器本系统采用品闸管整流装置,它包括触发电路和品闸管主回路。忽略 晶闸管控制电路的时间迟后,其输入输出方程为 4。=K42 (2-15) 式中K,为比例系数。 4.直流电动机直接引用例2-2所求得的直流电动机的微分方程式(2-9): T.do,@+o.0=K.40-KM0 (2-16) 式中T.、Km、K。及M:均是考虑齿轮系和负载后,折算到电动机轴上的等效值。 5.齿轮系设齿轮系的速比为1,则电动机转速0经齿轮系减速后变为0,故有
11 [例 2-4] 试列写图 2-4 所示速度控制系统的微分方程。 + K1 K2 功率 放大 + - m 负 载 g u R2 R1 R1 R2 a u R1 uf C u1 u2 M TG 图 2-4 速度控制系统 解 通过分析图 2-4 可知控制系统的被控对象是电动机(带负载),系统的输出量 是 转速,输入量是 g u ,控制系统由给定电位器、运算放大器Ⅰ(含比较作用)、运算放大器Ⅱ (含 RC 校正网络)、功率放大器、测速发电机、减速器等部分组成。现分别列写各元部件 的微分方程。 1.运算放大器Ⅰ 输入量(即给定电压) g u 与速度反馈电压 f u 在此合成产生偏差电 压并经放大,即 ( ) u1 = K1 ug − u f (2-13) 式中 K1 = R2 R1 是运算放大器Ⅰ的比例系数。 2.运算放大器Ⅱ 考虑 RC 校正网络, 2 u 与 1 u 之间的微分方程为 ( ) 1 1 2 2 u dt du u = K + (2-14) 式中 K2 = R2 R1 是运算放大器Ⅱ的比例系数, = RC 是微分时间常数。 3.功率放大器 本系统采用晶闸管整流装置,它包括触发电路和晶闸管主回路。忽略 晶闸管控制电路的时间迟后,其输入输出方程为 ua = K3u2 (2-15) 式中 K3 为比例系数。 4.直流电动机 直接引用例 2-2 所求得的直流电动机的微分方程式(2-9): ( ) ( ) ( ) ( ) t K u t K M t dt d t T m m a c c m m + = − (2-16) 式中 Tm 、 Km 、 Kc 及 Mc 均是考虑齿轮系和负载后,折算到电动机轴上的等效值。 5.齿轮系 设齿轮系的速比为 i ,则电动机转速 m 经齿轮系减速后变为 ,故有
(2-17) 6.测速发电机测速发电机的输出电压4与其转速成正比,即有 ur=Ko (2-18 式中K,是测速发电机比例系数(V/rad/s) 从上述各方程中消去中间变量,经整理后便得到控制系统的微分方程 du. (2-19) 式中T=(iTm+K,K2KKK,t)/i+K,K2K,KmK,) Ks=KK2KK/(i+k k2KKK) Kg=KK:KK/i+KKKKK) Ke=Kc/(i+KK2KKK) 综上所述,列写元件微分方程式的步骤可归纳如下: (1)根据元件的工作原理及其在控制系统中的作用,确定其输入量和输出量: (2)分析元件工作中所遵循的物理规律或化学规律,列 相应的微分方程: (3)消去中间变量,得到输出量与输入量之间关系的微分方程,即数学模型。 比较式(2-4)、(2-8)、(2-12)和(2-19)后发现,虽然它们所代表的系统的类别、结 构完全不同,但表征其运动特征的微分方程式却是相似的。从这里也可以看出,尽管环节(或 系统)的物理性质不同,它们的数学模型却可以是相似的。这就是系统的相似性,利用这个 性质,就可以用那些数学模型容易建立,参数调节方便的系统作为模型,代替实际系统从事 实验研究 2.2非线性数学模型的线性化 在建立控制系统的数学模型时,常常会遇到非线性的问题。严格地说,实际物理元件或 系统都是非线性的。例如,弹簧的刚度与其形变有关,因此弹簧系数K实际上是其位移x的 函数,并非常值:电阻 、电容、电感等参数与周围环境 (温度、湿度 力 )及流经它们 的电流有关,也并非常值:电动机本身的摩擦、死区等非线性因素会使其运动方程复杂化而 成为非线性方程。对于线性系统的数学模型的求解,可以借用工程数学中的拉氏变换,原则 上总能获得较为准确的解答。而对于非线性微分方程则没有通用的解析求解方法,利用计算 机可以对具体的非线性问题近似计算出结果,但难以求得各类非线性系统的普遍规律。因此, 在理论研究时,考虑到工程实际特点,常常在合理的、可能的条件下将非线性 方程近似处理 为线性方程,即所谓线性化。 控制系统都有一个额定的工作状态以及与之相对应的工作点。由数学的级数理论可知, 若函数在给定区域内有各阶导数存在,便可以在给定工作点的领域将非线性函数展开为泰勒 级数。当偏差范围很小时,可以忽略级数展开式中偏差的高次项,从而得到只包含偏差一次
12 m i 1 = (2-17) 6.测速发电机 测速发电机的输出电压 f u 与其转速 成正比,即有 u f = Kt (2-18) 式中 Kt 是测速发电机比例系数 (V rad s)。 从上述各方程中消去中间变量,经整理后便得到控制系统的微分方程 ( ) ' ' K u K M t dt du K dt d T g g c c g m g + = + − (2-19) 式中 ( ) ( ) 1 2 3 1 2 3 ' m m m t K K K K m Kt T = iT + K K K K K i + ( ) 1 2 3 1 2 3 ' g m K K K Km Kt K = K K K K i + ( ) g 1 2 3 m K1K2K3K m Kt K = K K K K i + ( ) 1 2 3 ' c c K K K K m Kt K = K i + 综上所述,列写元件微分方程式的步骤可归纳如下: (1)根据元件的工作原理及其在控制系统中的作用,确定其输入量和输出量; (2)分析元件工作中所遵循的物理规律或化学规律,列写相应的微分方程; (3)消去中间变量,得到输出量与输入量之间关系的微分方程,即数学模型。 比较式(2-4)、(2-8)、(2-12)和(2-19)后发现,虽然它们所代表的系统的类别、结 构完全不同,但表征其运动特征的微分方程式却是相似的。从这里也可以看出,尽管环节(或 系统)的物理性质不同,它们的数学模型却可以是相似的。这就是系统的相似性,利用这个 性质,就可以用那些数学模型容易建立,参数调节方便的系统作为模型,代替实际系统从事 实验研究。 2.2 非线性数学模型的线性化 在建立控制系统的数学模型时,常常会遇到非线性的问题。严格地说,实际物理元件或 系统都是非线性的。例如,弹簧的刚度与其形变有关,因此弹簧系数 K 实际上是其位移 x 的 函数,并非常值;电阻、电容、电感等参数与周围环境(温度、湿度、压力等)及流经它们 的电流有关,也并非常值;电动机本身的摩擦、死区等非线性因素会使其运动方程复杂化而 成为非线性方程。对于线性系统的数学模型的求解,可以借用工程数学中的拉氏变换,原则 上总能获得较为准确的解答。而对于非线性微分方程则没有通用的解析求解方法,利用计算 机可以对具体的非线性问题近似计算出结果,但难以求得各类非线性系统的普遍规律。因此, 在理论研究时,考虑到工程实际特点,常常在合理的、可能的条件下将非线性方程近似处理 为线性方程,即所谓线性化。 控制系统都有一个额定的工作状态以及与之相对应的工作点。由数学的级数理论可知, 若函数在给定区域内有各阶导数存在,便可以在给定工作点的领域将非线性函数展开为泰勒 级数。当偏差范围很小时,可以忽略级数展开式中偏差的高次项,从而得到只包含偏差一次