第三章控制系统的时域分析法 丝析和设计系统的首要工作是确定系统的数学模器 。一旦建立了合理的、便于分析的数 ,就可以对已组成的控制系统进行分析,从而得出系统性能的改进方法。 经典控制理论中,常用时域分析法、根轨迹法或频率分析法来分析控制系统的性能。本 章介绍的时与 “是通过传递函数、拉氏变换及反变换求出系统在典型输入下的输出表达 R(s) 式,从而分析 间向应的全部信息。与其他分析法出较,时域分析法是一种直接分析法 具有直观和准确的优点,尤其适用于 二阶系统性能的分析和计算。对二阶以上的高阶系 统则须采用频率分析法和根轨迹法 3.1典型输入信号 控制系统的输出响应是系统数学模型的解。系统的输出响应不仅取决于系统本身的结 盈软数,初找盗品都食入信S的形式省初险状态以作梦一定。如现定为E边 为统 的形式 响应由系 身的结 数米确员 因而更便于对各种系统进行比较和研究。自动控制系统常用的典型输入信号有如图3一1所 示几种形式: 名称 曲线 时域表达式 复域表达式 r(t) R10120 阶跃函数 R=1单位阶跃函数 nt) 611≥0 斜坡函到 h=】单位斜坡函数 n(t) 加速度函数 120 单位加速度函数 r(t) 801-0 脉冲函数 6u) 单位理相歌冲函数 r(t) 正弦函数 Asinox 图31典型输入信号 3.2一阶系统的时域响应 凡是可用一阶微分方程描述的系统称一阶系统。 一阶系统的传递函数为 G6)=Ts+1 式中T称为时间常数,它是表征系统惯性的一个重要参数。所以一阶系统是一个非周期的 惯性环 下面分析在单位阶跃响应三种不同的典型输入信号作用下一阶系统的时域分析 R(s) 1C(s) Ts 19
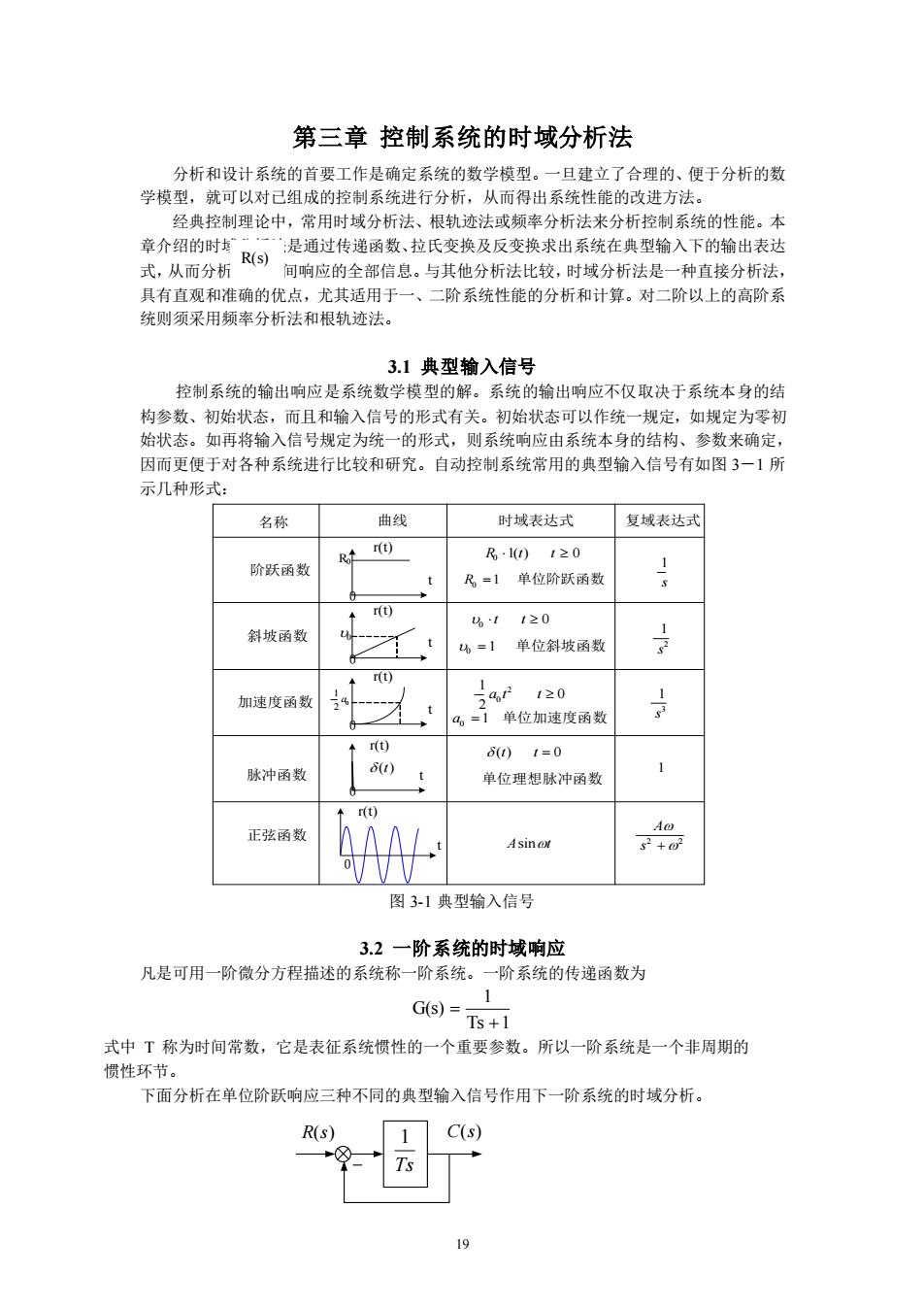
19 第三章 控制系统的时域分析法 分析和设计系统的首要工作是确定系统的数学模型。一旦建立了合理的、便于分析的数 学模型,就可以对已组成的控制系统进行分析,从而得出系统性能的改进方法。 经典控制理论中,常用时域分析法、根轨迹法或频率分析法来分析控制系统的性能。本 章介绍的时域分析法是通过传递函数、拉氏变换及反变换求出系统在典型输入下的输出表达 式,从而分析系统时间响应的全部信息。与其他分析法比较,时域分析法是一种直接分析法, 具有直观和准确的优点,尤其适用于一、二阶系统性能的分析和计算。对二阶以上的高阶系 统则须采用频率分析法和根轨迹法。 3.1 典型输入信号 控制系统的输出响应是系统数学模型的解。系统的输出响应不仅取决于系统本身的结 构参数、初始状态,而且和输入信号的形式有关。初始状态可以作统一规定,如规定为零初 始状态。如再将输入信号规定为统一的形式,则系统响应由系统本身的结构、参数来确定, 因而更便于对各种系统进行比较和研究。自动控制系统常用的典型输入信号有如图 3-1 所 示几种形式: 名称 阶跃函数 斜坡函数 加速度函数 脉冲函数 正弦函数 曲线 时域表达式 复域表达式 0 t r(t) 0 t r(t) 0 t r(t) R0 0 0 t r(t) 0 2 1 a (t) R0 1(t) t 0 0 t t 0 0 2 1 2 a0 t t (t) t 0 Asint R0 1 单位阶跃函数 0 1 单位斜坡函数 a0 1 单位加速度函数 单位理想脉冲函数 s 1 2 1 s 3 1 s 1 2 2 s A 0 t r(t) 图 3-1 典型输入信号 3.2 一阶系统的时域响应 凡是可用一阶微分方程描述的系统称一阶系统。一阶系统的传递函数为 Ts 1 1 G(s) 下面分析在单位阶跃响应三种不同的典型输入信号作用下一阶系统的时域分析。 式中 T 称为时间常数,它是表征系统惯性的一个重要参数。所以一阶系统是一个非周期的 惯性环节。 R(s) Ts 1 R(s) C(s)
当输入信号r)=1()时,Rs=1s,系统输出量的拉氏变换为 cs)=s+)s+1 对上式取拉氏反变换,得单位阶跃响应为 c0-1-e7 (t≥0) 由此可见,一阶系统的阶跃响应是一条初始值为0,按指数规律上升到稳态值1的曲线, 如图32所示。由系统的输出响应可得到如下的性能。 (1)由于c)的终值为1,因此系统稳态误差为0。 T时,-0632。这表明当系统的单位阶跃响应达到稳态值的63.2%时的时间。 单位阶跃响应曲线的初始斜率为 这表明一阶系统的单位阶跃响应如果以初始速度上升到稳态值1,所需的时间恰好等于 =1 e-w 图32一阶系统的时域响应 (3)根据暂态性能指标的定义可以求得 调节时间为 t.=3Ts+5%的提差带 t.=4T(s) (士2%的误差带) 延迟时间为 t4=0.69T(s) 上升时间为 t,=2.20T(s) 峰值时间和超调量都为0。 3.3二阶系统的阶跃响应 凡是可用二阶微分方程描写的系统称为二阶系统。 在工程实我中 阶系统不乏其例 特别是,不少高阶系统在一定条件下可用二阶系统的特性来近似表征。因此,研究典型二阶 系统的分析和计算方法,具有较大的实际意义。 3.3.1二阶系统的数学模型 典型的二阶系统动态结构图如图,系统的开环传递函数为 K R(s) C(s) G)=s5+Ds6+20,】 (Ts+D 系统的闭环传递函数为
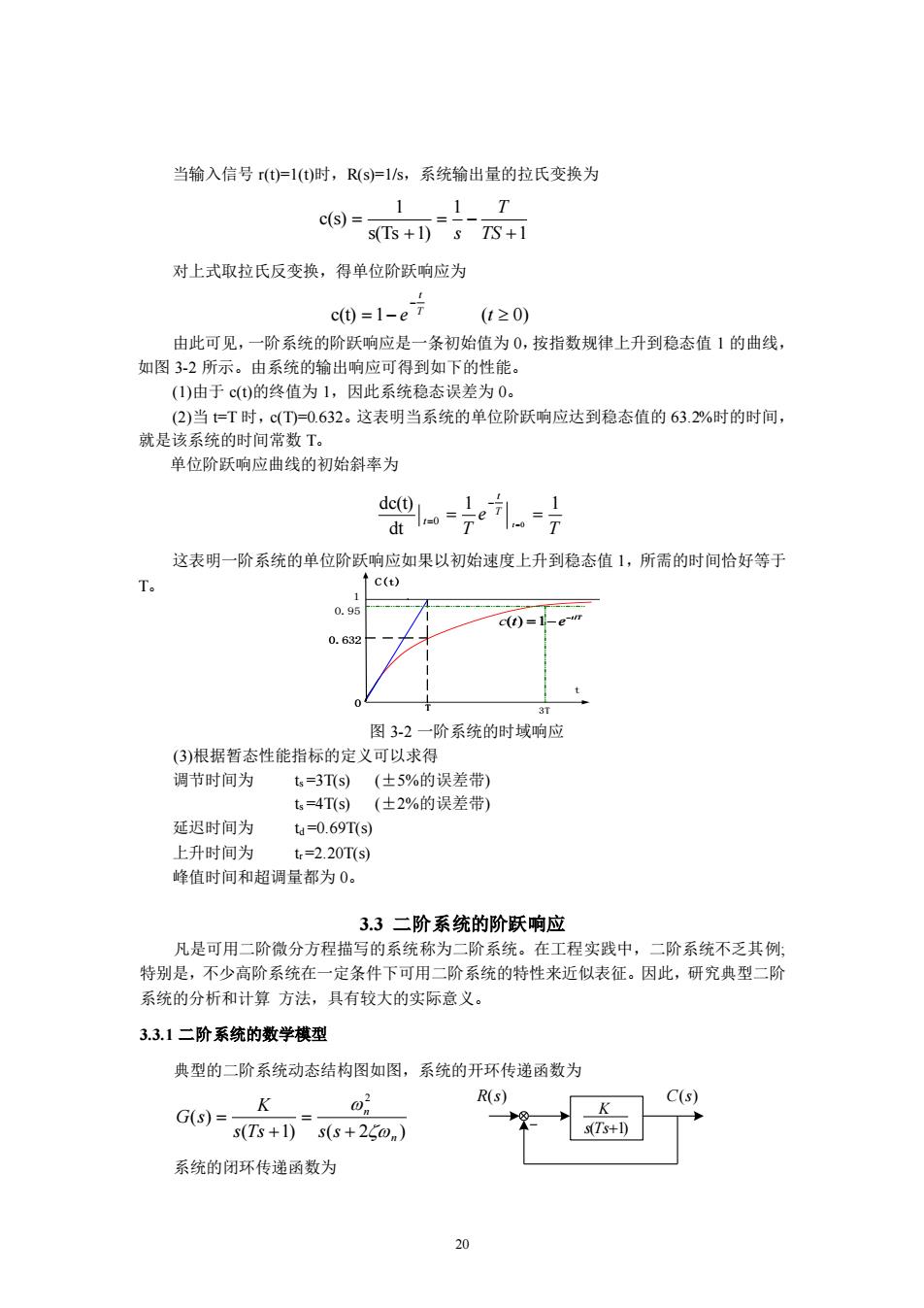
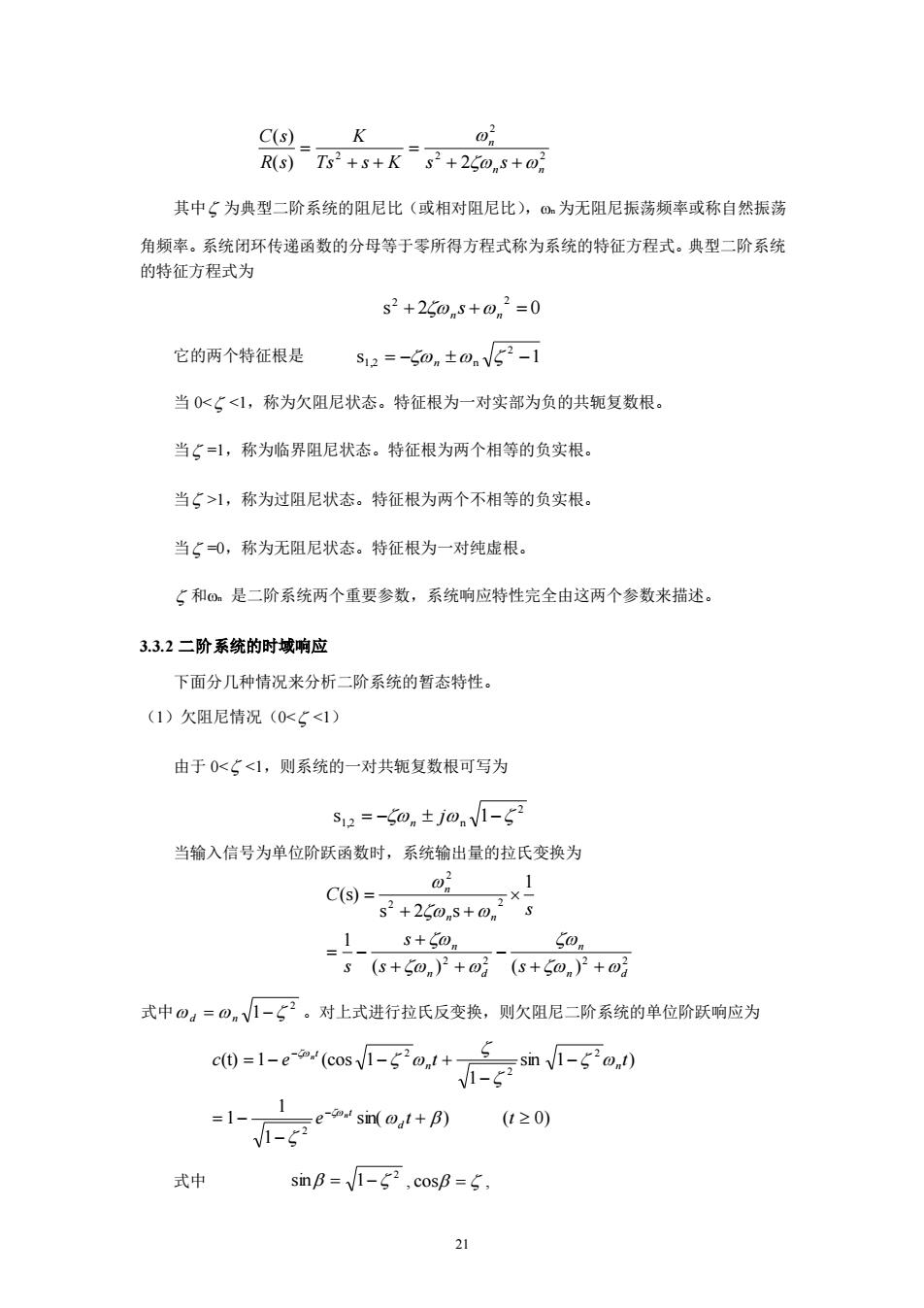
20 当输入信号 r(t)=1(t)时,R(s)=1/s,系统输出量的拉氏变换为 1 1 s(Ts 1) 1 c(s) − TS T s 对上式取拉氏反变换,得单位阶跃响应为 c(t) 1− ( 0) − e t T t 由此可见,一阶系统的阶跃响应是一条初始值为 0,按指数规律上升到稳态值 1 的曲线, 如图 3-2 所示。由系统的输出响应可得到如下的性能。 (1)由于 c(t)的终值为 1,因此系统稳态误差为 0。 (2)当 t=T 时,c(T)=0.632。这表明当系统的单位阶跃响应达到稳态值的 63.2%时的时间, 就是该系统的时间常数 T。 单位阶跃响应曲线的初始斜率为 T e T t T t t 1 1 dt dc(t) 0 0 − 这表明一阶系统的单位阶跃响应如果以初始速度上升到稳态值 1,所需的时间恰好等于 T。 图 3-2 一阶系统的时域响应 (3)根据暂态性能指标的定义可以求得 调节时间为 ts =3T(s) (±5%的误差带) ts =4T(s) (±2%的误差带) 延迟时间为 td =0.69T(s) 上升时间为 tr =2.20T(s) 峰值时间和超调量都为 0。 3.3 二阶系统的阶跃响应 凡是可用二阶微分方程描写的系统称为二阶系统。在工程实践中,二阶系统不乏其例; 特别是,不少高阶系统在一定条件下可用二阶系统的特性来近似表征。因此,研究典型二阶 系统的分析和计算 方法,具有较大的实际意义。 3.3.1 二阶系统的数学模型 典型的二阶系统动态结构图如图,系统的开环传递函数为 ( 1) ( 2 ) ( ) 2 n n s Ts s s K G s 系统的闭环传递函数为 0 0.632 T C(t) t T c t e / ( ) 1 − − 0 0.632 T t C(t) 1 t T t e / ( ) 1 − − 0.95 3T R(s) s(Ts1) K C(s)
C(s)K R72+5+K2+2G,3+ 其中5为典型二阶系统的阻尼比(或相对阻尼比),©为无阻尼振荡频率或称自然振荡 角频率。系统闭环传递函数的分母等于零所得方程式称为系统的特征方程式。典型二阶系统 的特征方程式为 s2+2∠0n3+0n2=0 它的两个特征根是512=-0n±0。V2-1 当0<(<1,称为欠阻尼状态。特征根为一对实部为负的共轭复数根。 当5=1,称为临界阻尼状态。特征根为两个相等的负实根。 当二>1,称为过阻尼状态。特征根为两个不相等的负实根。 当50,称为无阻尼状态。特征根为一对纯虚根。 和@。是二阶系统两个重要参数,系统响应特性完全由这两个参数来描述。 3.3.2二阶系统的时域响应 下面分几种情况来分析二阶系统的暂态特性。 (1)欠阻尼情况(0<<1) 由于0<5<1,则系统的一对共轭复数根可写为 s12=-0n±j0V1-5 当输入信号为单位阶跃函数时,系统输出量的拉氏变换为 G8-+2+欧对 =+a+++a 3+50n 式中0:=0V一S2。对上式进行拉氏反变换,则欠阻尼二阶系统的单位阶跃响应为 0=1-ems-Fou+2hi-Gon ,+0 =1-1 式中 sinB=1-5.cosB=5
21 2 2 2 2 ( ) 2 ( ) n n n Ts s K s s K R s C s 其中 为典型二阶系统的阻尼比(或相对阻尼比),n 为无阻尼振荡频率或称自然振荡 角频率。系统闭环传递函数的分母等于零所得方程式称为系统的特征方程式。典型二阶系统 的特征方程式为 s 2 0 2 2 n s n 它的两个特征根是 s 1 2 1,2 −n n − 当 0< <1,称为欠阻尼状态。特征根为一对实部为负的共轭复数根。 当 =1,称为临界阻尼状态。特征根为两个相等的负实根。 当 >1,称为过阻尼状态。特征根为两个不相等的负实根。 当 =0,称为无阻尼状态。特征根为一对纯虚根。 和n 是二阶系统两个重要参数,系统响应特性完全由这两个参数来描述。 3.3.2 二阶系统的时域响应 下面分几种情况来分析二阶系统的暂态特性。 (1)欠阻尼情况(0< <1) 由于 0< <1,则系统的一对共轭复数根可写为 2 s1,2 −n jn 1− 当输入信号为单位阶跃函数时,系统输出量的拉氏变换为 2 2 2 2 2 2 2 ( ) ( ) 1 1 s 2 s (s) n d n n d n n n n s s s s s C − − 式中 2 d n 1− 。对上式进行拉氏反变换,则欠阻尼二阶系统的单位阶跃响应为 sin( ) ( 0) 1 1 1 sin 1 ) 1 (t) 1 (cos 1 2 2 2 2 − − − − − − − − e t t c e t t d t n n t n n 式中 2 sin 1− , cos
B-arctan -arccos 由上式知欠阻尼二阶系统的单位阶跃响应由两部分组成,第一项为稳态分量,第二项为 暂态分量。它是一个幅值按指数规律衰减的有阻尼的正弦振荡,振荡角频率为®。·响应曲 线如图所示。 (2)临界阻尼情况(5=1) 当5=1时,系统有两个相等的负实根,为 512=0。 在单位阶跃函数作用下,输出量的拉氏变换为 C(s)(s+0)3+0 其反拉氏变换为 c0=1-ew1+o) (u20) 上式表明,临界阻尼二阶系统的单位阶跃响应是稳态值为1的非周期上升过程,整个响 应特性不产生振荡。响应曲线如图所示。 (3)过阻尼情况(5>1) 当>1时,系统有两个不相等的负实根 s2=-5o,±oV2-i 当输入信号为单位阶跃函数时,输出量的拉氏变换为: qo-。- 其反变换为 1 e-e 0=12-+ge司≥0 上式表明,系统响应含有两个单调衰减的指数项,它们的代数和决不会超过稳态值1,因而 过阻尼二阶系统的单位阶跃响应是非振荡的。响应曲线如图33所示。 (4)无阻尼情况(5-0) 当5-0时输出量的拉氏变换为
22 arccos 1 arctan 2 − 由上式知欠阻尼二阶系统的单位阶跃响应由两部分组成,第一项为稳态分量,第二项为 暂态分量。它是一个幅值按指数规律衰减的有阻尼的正弦振荡,振荡角频率为 d 。响应曲 线如图所示。 (2)临界阻尼情况( =1) 当 =1 时,系统有两个相等的负实根,为 1,2 n s 在单位阶跃函数作用下,输出量的拉氏变换为 n n n n n n s s s s s s C s − − 1 ( ) 1 ( 2 ) ( ) 2 2 2 2 其反拉氏变换为 ( ) 1− (1 ) ( 0) − c t e t t n t n 上式表明,临界阻尼二阶系统的单位阶跃响应是稳态值为 1 的非周期上升过程,整个响 应特性不产生振荡。响应曲线如图所示。 (3)过阻尼情况( >1) 当>1 时,系统有两个不相等的负实根 s 1 2 1,2 −n n − 当输入信号为单位阶跃函数时,输出量的拉氏变换为: s s s C n 1 (s -s )( ) (s) 1 2 2 − 其反变换为 ] 1 1 [ 2 1 1 (t) 1 2 ( 1) 2 ( 1) 2 2 2 2 2 − − − − − − − − − − − t t n n e e c 上式表明,系统响应含有两个单调衰减的指数项,它们的代数和决不会超过稳态值 1,因而 过阻尼二阶系统的单位阶跃响应是非振荡的。响应曲线如图 3-3 所示。 (4)无阻尼情况( =0) 当 =0 时输出量的拉氏变换为 (t≥0)
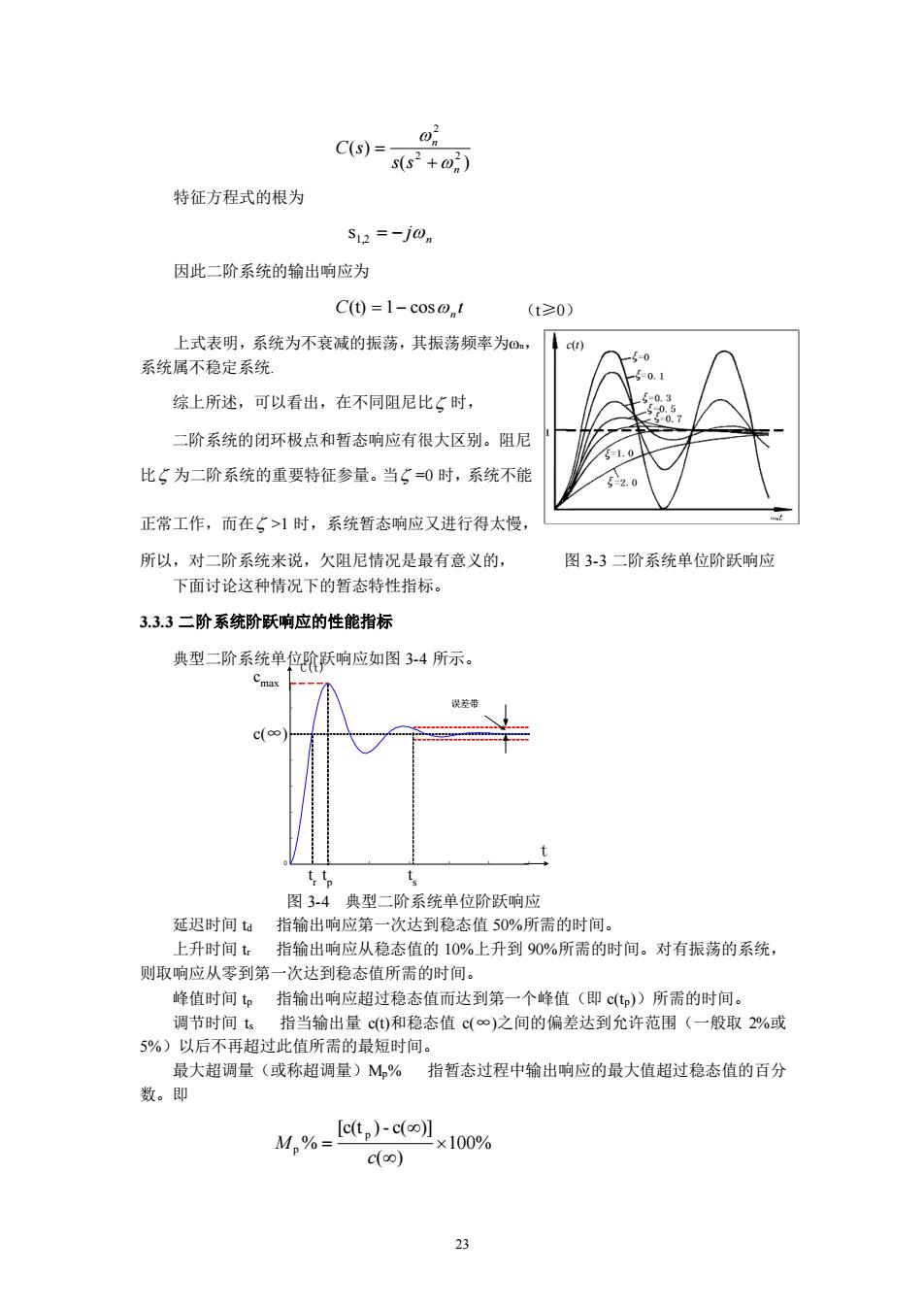
C(s)= s(s"+o) 特征方程式的根为 S12=-j0 因此二阶系统的输出响应为 C(t)=1-cos@! (t≥0】 上式表明,系统为不衰减的振荡,其振荡频率为@ di) 系统属不稳定系统。 综上所述,可以看出,在不同阻尼比时, 二阶系统的闭环极点和暂态响应有很大区别。阻尼 =1.0 比5为二阶系统的重要特征参量。当5=0时,系统不能 2。 正常工作,而在(>1时,系统暂态响应又进行得太慢, 所以,对二阶系统来说,欠阻尼情况是最有意义的, 图3-3二阶系统单位阶跃响应 下面讨论这种情况下的暂态特性指标。 3.3.3二阶系统阶跃响应的性能指标 典型二阶系统单位耽跃响应如图34所示。 c(co) tt 图34典型二阶系统单位阶跃响应 延迟时间指输出响应第一次达到稳态值50%所需的时间。 上升时间 指输出响应从稳态值的10%上升到90%所需的时间。对有振荡的系统 则取响应从零到第一次达到稳态值所需的时间。 峰值时间指输出响应超过稳态值而达到第一个峰值(即c()所需的时间。 调节时间t。指当输出量c0)和稳态值c(∞)之间的偏差达到允许范围(一般取2%或 5%)以后不再超过此值所需的最短时间。 最大超调量(或称超调量)M 指暂态过程中输出响应的最大值超过稳态值的百分 数。即 M,%=t,小-coj ×100% c(oo)
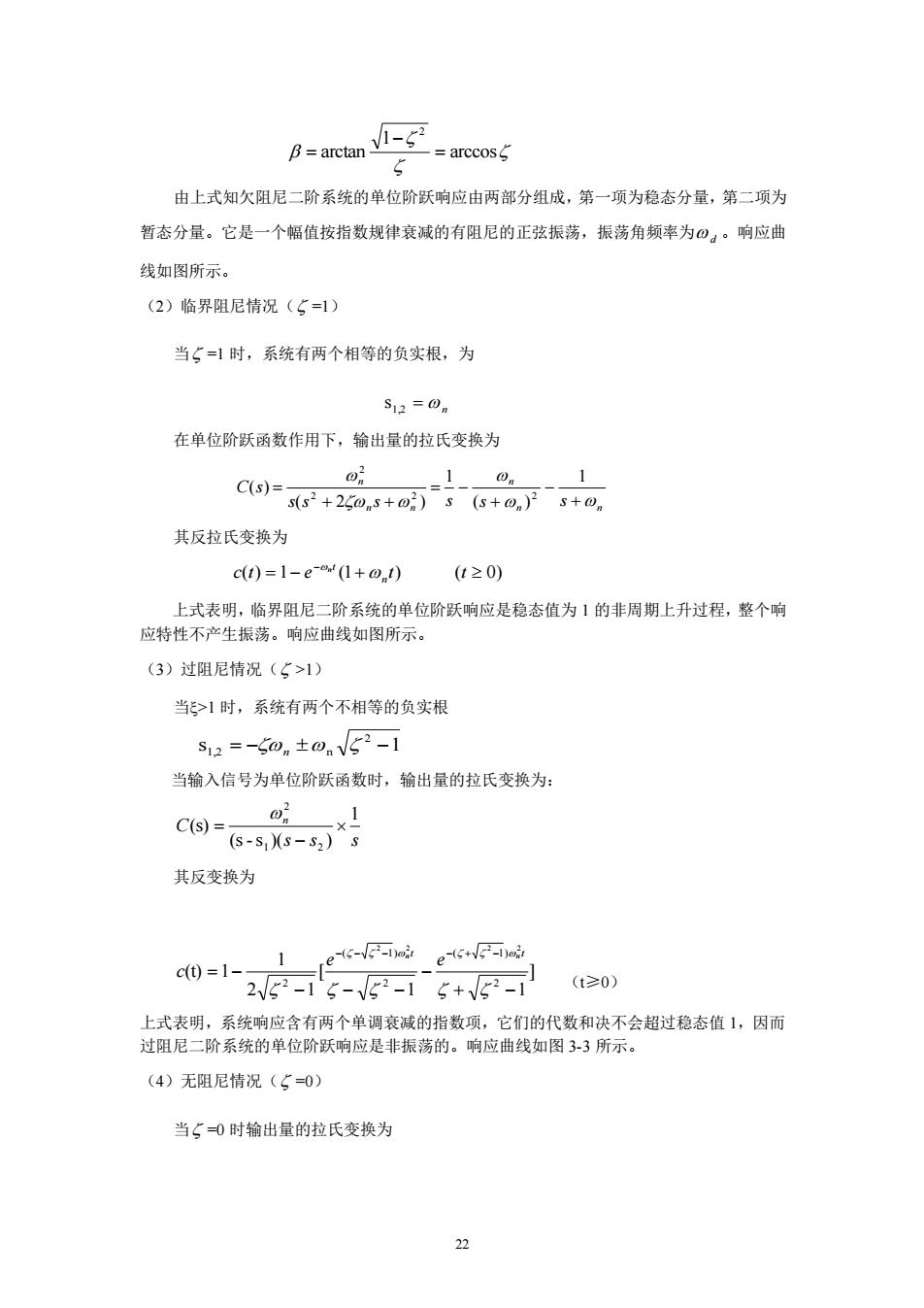
23 ( ) ( ) 2 2 2 n n s s C s 特征方程式的根为 n s1,2 − j 因此二阶系统的输出响应为 C t n (t) 1− cos 上式表明,系统为不衰减的振荡,其振荡频率为n, 系统属不稳定系统. 综上所述,可以看出,在不同阻尼比 时, 二阶系统的闭环极点和暂态响应有很大区别。阻尼 比 为二阶系统的重要特征参量。当 =0 时,系统不能 正常工作,而在 >1 时,系统暂态响应又进行得太慢, 所以,对二阶系统来说,欠阻尼情况是最有意义的, 图 3-3 二阶系统单位阶跃响应 下面讨论这种情况下的暂态特性指标。 3.3.3 二阶系统阶跃响应的性能指标 典型二阶系统单位阶跃响应如图 3-4 所示。 图 3-4 典型二阶系统单位阶跃响应 延迟时间 td 指输出响应第一次达到稳态值 50%所需的时间。 上升时间 tr 指输出响应从稳态值的 10%上升到 90%所需的时间。对有振荡的系统, 则取响应从零到第一次达到稳态值所需的时间。 峰值时间 tp 指输出响应超过稳态值而达到第一个峰值(即 c(tp))所需的时间。 调节时间 ts 指当输出量 c(t)和稳态值 c(∞)之间的偏差达到允许范围(一般取 2%或 5%)以后不再超过此值所需的最短时间。 最大超调量(或称超调量)Mp% 指暂态过程中输出响应的最大值超过稳态值的百分 数。即 100% ( ) [c(t ) - c( )] % p p c M (t≥0) c(t) 0 误差带 t C(t) c(∞) cmax t r t p t s