自动控制理论 第二章控制系统的数学模型 新疆大学电气工程学院 2025/1114
2025/1/14 第二章控制系统的数学模型 新疆大学 电气工程学院 自动控制理论
自动控制理论 描述系统运动的数学模型 >输入-输出描述 微分方程是这种描述的最基本形式。传递函数、方框图 等其它模型均由它而导出 >状态变量描述 状态方程是这种描述的最基本形式 米建立系统数学模型的方法 > 实验法 >解析法 第二章控制系统的数学模型 2025/1/14
2 第二章 控制系统的数学模型 2025/1/14 描述系统运动的数学模型 自动控制理论 ➢状态变量描述 状态方程是这种描述的最基本形式 建立系统数学模型的方法 ➢ 实验法 ➢ 解析法 ➢ 输入-输出描述 微分方程是这种描述的最基本形式。传递函数、方框图 等其它模型均由它而导出
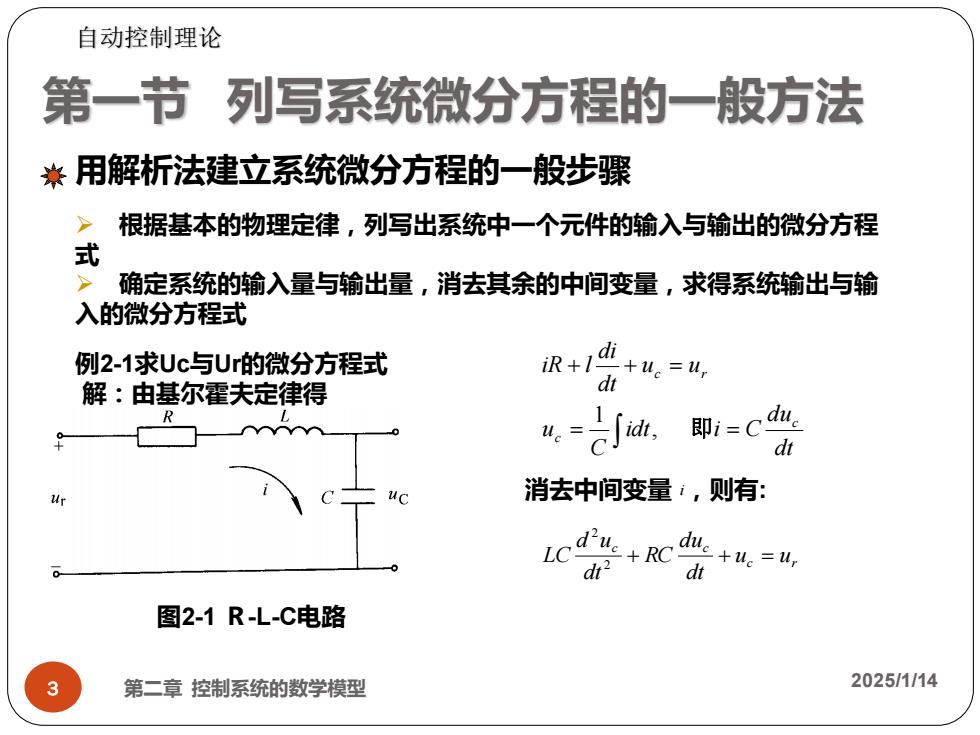
自动控制理论 第一节列写系统微分方程的一般方法 *用解析法建立系统微分方程的一般步骤 >根据基本的物理定律,列写出系统中一个元件的输入与输出的微分方程 式 > 确定系统的输入量与输出量,消去其余的中间变量,求得系统输出与输 入的微分方程式 例2-1求Uc与Ur的微分方程式 R+1 +u。=u, 解:由基尔霍夫定律得 dt 即i=cdue dt 消去中间变量,则有: dt 图2-1R-L-C电路 3 第二章控制系统的数学模型 2025/1/14
第一节 列写系统微分方程的一般方法 用解析法建立系统微分方程的一般步骤 dt du idt i C C u u u dt di iR l c c c r = = + + = , 即 1 第二章 控制系统的数学模型 2025/1/14 3 自动控制理论 ➢ 根据基本的物理定律,列写出系统中一个元件的输入与输出的微分方程 式 ➢ 确定系统的输入量与输出量,消去其余的中间变量,求得系统输出与输 入的微分方程式 图2-1 R-L-C电路 例2-1求Uc与Ur的微分方程式 解:由基尔霍夫定律得 c r c c u u dt du RC dt d u LC + + = 2 2 消去中间变量 i ,则有:
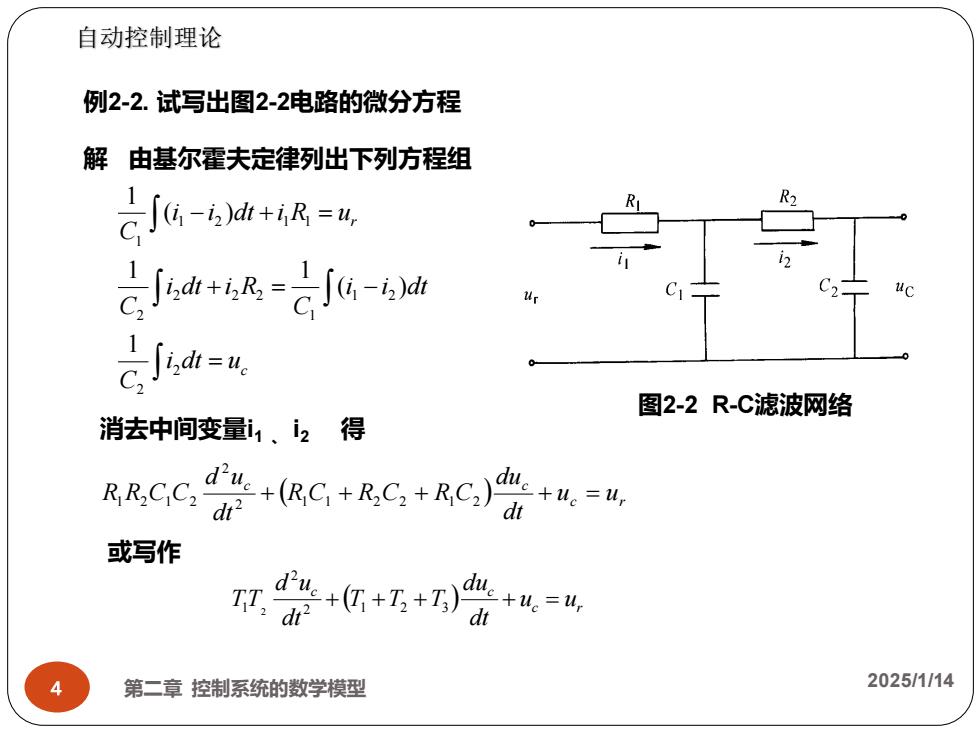
自动控制理论 例2-2.试写出图2-2电路的微分方程 解由基尔霍夫定律列出下列方程组 Cu-i+R-u +6&-2m fou 图2-2R-C滤波网络 消去中间变量1、2得 RRCG器+(风G+见G+RG)陪+=% 或写作 ++不+路+= TT:dr 第二章控制系统的数学模型 2025/1/14
c r i dt u C i i dt C i dt i R C i i dt i R u C = + = − − + = 2 2 1 2 1 2 2 2 2 1 2 1 1 1 1 ( ) 1 1 ( ) 1 1 i ( ) c r c c u u dt du R C R C R C dt d u R R C C + 1 1 + 2 2 + 1 2 + = 2 2 1 2 1 2 ( ) c r c c u u dt du T T T dt d u TT + 1 + 2 + 3 + = 2 2 1 2 第二章 控制系统的数学模型 2025/1/14 4 自动控制理论 图2-2 R-C滤波网络 例2-2. 试写出图2-2电路的微分方程 解 由基尔霍夫定律列出下列方程组 消去中间变量i1 、 i2 得 或写作
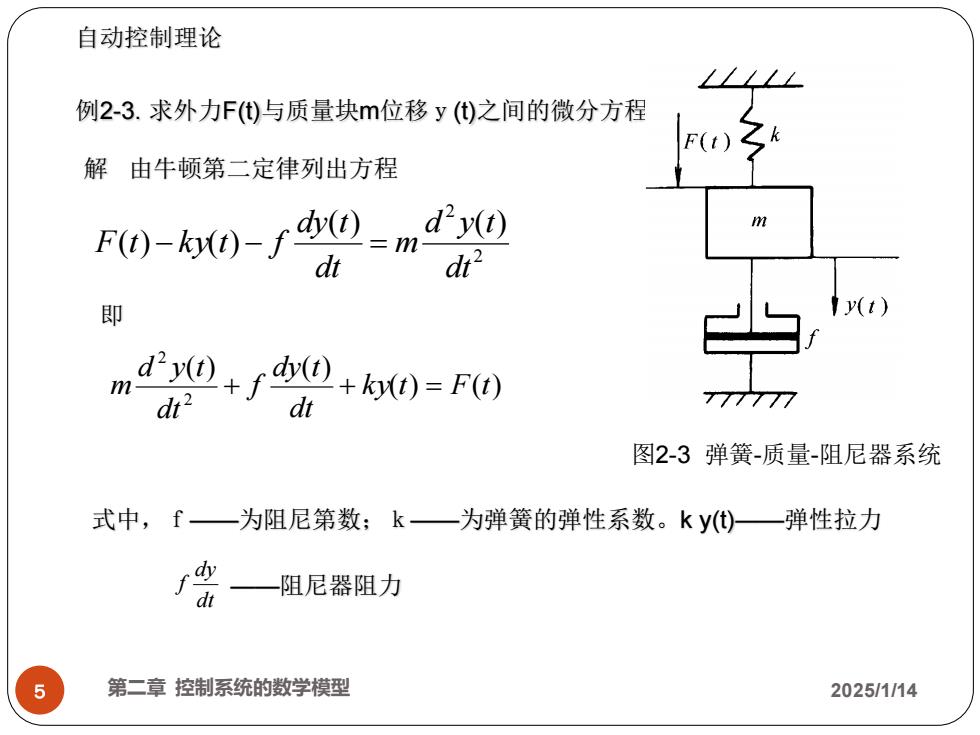
自动控制理论 例2-3.求外力F()与质量块m位移y()之间的微分方程 F()之k 解由牛顿第二定律列出方程 F0-0-f40-m0 dt 即 d@+f0+0=F0 m dt2 dt 777777 图2-3弹簧-质量-阻尼器系统 式中,f一为阻尼第数;k一为弹簧的弹性系数。ky)—弹性拉力 阻尼器阻力 5 第二章控制系统的数学模型 2025/1/14
5 第二章 控制系统的数学模型 2025/1/14 2 2 ( ) ( ) ( ) ( ) dt d y t m dt dy t F t − k y t − f = ( ) ( ) ( ) ( ) 2 2 k y t F t dt dy t f dt d y t m + + = 自动控制理论 例2-3. 求外力F(t)与质量块m位移y(t)之间的微分方程 解 由牛顿第二定律列出方程 图2-3 弹簧-质量-阻尼器系统 即 式中,f——为阻尼第数;k——为弹簧的弹性系数。k y(t)——弹性拉力 dt dy f ——阻尼器阻力