自动控制理论 第二节非线性数学模型的线性化 *非线性数学模型线性化的假设 变量对于平衡工作点的偏离较 >非线性函数不仅连续,而且其多阶导数均存在 微偏法 在给定工作点领域将此非线性函数展开泰勒级数,并略去二阶及二阶以上 的各项,用所得的线性化方程代替原有的非线性方程。 设一非线性元件的输入为x、输出为y,它们间的 关系如图29所示,相应的数学表达式为 y=f(x) (2-13) 图29非线性特性的线性化 第二章控制系统的数学模型 2025/1/14
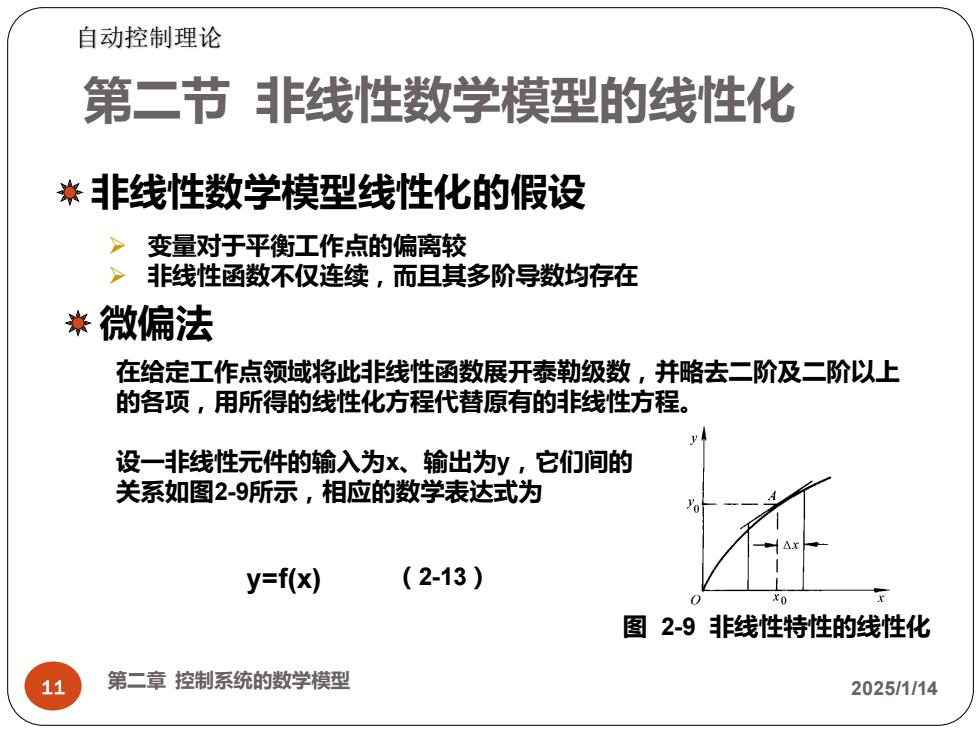
第二节 非线性数学模型的线性化 11 第二章 控制系统的数学模型 2025/1/14 自动控制理论 非线性数学模型线性化的假设 ➢ 变量对于平衡工作点的偏离较 ➢ 非线性函数不仅连续,而且其多阶导数均存在 微偏法 在给定工作点领域将此非线性函数展开泰勒级数,并略去二阶及二阶以上 的各项,用所得的线性化方程代替原有的非线性方程。 设一非线性元件的输入为x、输出为y,它们间的 关系如图2-9所示,相应的数学表达式为 图 2-9 非线性特性的线性化 y=f(x) (2-13)
自动控制理论 在给定工作点A(x,yo)附近,将上式展开为泰勒级数 ==)- 由于增量△x=X-X,较小,故可略去式中的(x-x)项及 其后面的所有的高阶项,于是得线性化方程 y=yo+K(x-xo) 或写为 △y=K△x 式中y=f(x), K= dx x=xo> Ay=y-Yo,Ax=x-Xo 第二章控制系统的数学模型 2025/1/14
12 第二章 控制系统的数学模型 2025/1/14 = ( ) = ( )+ = ( − )+ = ( − ) + 2 2 0 2 0 0 0 0 2! 1 x x dx d f x x dx df y f x f x x x x x ( ) ( ) 0 0 0 0 0 , , 0 y y y x x x dx df y f x K y K x y y K x x = = x x = − = − = = + − = − − 式中 = , 或写为 其后面的所有的高阶项,于是得线性化方程 由于增量Δx x x0较小,故可略去式中的(x x0)2 项及 自动控制理论 在给定工作点A(x0,y0)附近,将上式展开为泰勒级数
自动控制理论 *举例 上节在推导直流他励发电动机的微分方程式时,曾假设其磁化曲线为直 线,实际上发电机的磁化曲线如图2-10所示。 设发电机原工作于磁化曲线的A点,若发电机的励磁电压增加△U1, 求其增量电势△Ec的变化规律。 如果发电机在小信号励磁电压的作用下,工作点八的偏离就较小,这样 就可通过点A作一切线CD,且以此切线CD近似代替原有的曲线EAF。 在平衡点A处,直流电机的方程为 igoR=uo (2-15) EGo=CΦ0 (2-16) A 若励磁电压增量△41,则有 (imedu 2-1D /BO dt EGo+AEG=C(①。+△D) Q-18图2-10发电机的磁化曲线 第二章控制系统的数学模型 2025/1/14
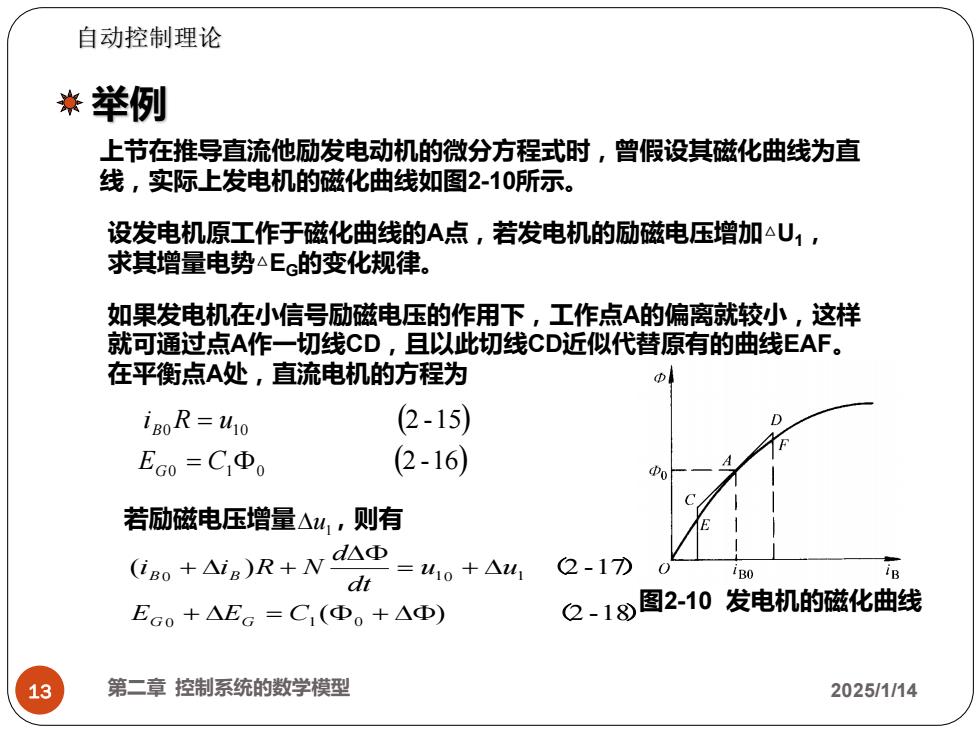
13 第二章 控制系统的数学模型 2025/1/14 ( ) (2 -16) 2 -15 0 1 0 0 1 0 = = E C i R u G B 自动控制理论 举例 上节在推导直流他励发电动机的微分方程式时,曾假设其磁化曲线为直 线,实际上发电机的磁化曲线如图2-10所示。 设发电机原工作于磁化曲线的A点,若发电机的励磁电压增加△U1, 求其增量电势△EG的变化规律。 图2-10 发电机的磁化曲线 若励磁电压增量 u1 ,则有 如果发电机在小信号励磁电压的作用下,工作点A的偏离就较小,这样 就可通过点A作一切线CD,且以此切线CD近似代替原有的曲线EAF。 在平衡点A处,直流电机的方程为 ( ) ( ) ( ) 2 -18 ( ) 2 -17 0 1 0 0 10 1 + = + = + + + E E C u u dt d i i R N G G B B

自动控制理论 由式(2-17)减式(2-15),式(2-17)减式(2-15)后得 AinR+N dao dt 2=△u 2-19) △EG=C1△0 2-20) 式(2-19)、(2-20)均为增量方程,它们描述了发电机在平衡点 A处受到△u1作用后的运动过程。对增量方程式而言,磁化曲线的坐 标原点不是在O点,而是移到八点。因而发电机的初始条件仍为零。 式中N为励磁绕组的匝数。 这里需要注意的是,在式(2-19)中之所以不写作L d△iB dt 而用NdA0 表示,其原因是那一段磁化曲线不是一条直线, dt 而d4 ≠常量,故用反电动势表示。 d△ig 第二章控制系统的数学模型 2025/1/14
14 第二章 控制系统的数学模型 2025/1/14 常量,故用反电动势表示。 dΔi dΔθ 而 表示,其原因是那一段磁化曲线不是一条直线, dt dΔθ 而用N , dt dΔi 这里需要注意的是,在式(2-19)中之所以不写作L B B 自动控制理论 由式(2-17)减式(2-15),式(2-17)减式(2-15)后得 ( ) ( ) 2 - 20 2 -19 1 1 = = + E C u dt d i R N G B 式(2-19)、(2-20)均为增量方程,它们描述了发电机在平衡点 A处受到△u1作用后的运动过程。对增量方程式而言,磁化曲线的坐 标原点不是在O点,而是移到A点。因而发电机的初始条件仍为零。 式中N为励磁绕组的匝数

自动控制理论 把磁化曲线0=f(.)在平衡点(Φ,i0)处展开为泰勒级数 ①=f6)=fto)上ftm。-in+f6m龙a-m}+.2-2川 略去上式中(。-io}项及其后面所有的高阶项,并令Φ-f(0)=△Φ, (a-io)=△ig,则式(2-21)便简化为 △Φ=f'(60)△iB 或写作 D=f飞n)=常数 2-22) d△i 于是式(2-19)和式(2-10)可写为 NaRNRNR Q-23) dt d△iBdt dt AEG=C2Aig (2-24) 式中L=f'6obC2=Cf"o) 15 第二章控制系统的数学模型 2025/1/14
( ) ( ) ( ) ( ) ( )( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 0 2 1 0 G 2 1 0 0 0 0 2 0 0 0 0 0 L N C C E C 2 - 24 R N R R 2 - 23 2 - 22 - , f - (2 - 21) 2! 1 - B B B B B B B B B B B B B B B B B B B B B B B B B f i f i i u dt d i i L dt d i d i d i N dt d i f i d i d f i i i i i f i f i f i f i i i i i i = = = = = + = + + = = = = − = = = = + + = , ( ) ( ) 式中 于是式(2-19)和式(2-10)可写为 常数 或写作 ,则式(2- 21)便简化为 略去上式中i -i 项及其后面所有的高阶项,并令 把磁化曲线θ f i 在平衡点 ,i 处展开为泰勒级数 2 B B 0 B 0 B 0 第二章 控制系统的数学模型 2025/1/14 15 自动控制理论