自动控制原理 二、带宽的确定 R(jo) 1)ω,的选择要兼顾跟 N(jo) 踪输入信号的能力和抗 干扰的能力。 0 @M 01 2)若输入信号的带宽 Φ(j0)川 为0~@,扰动信号 带宽为@1,则@u =(510)0M且使o1~ ①x置于0之外。 Wb 0,=(5~10)0M 0b生(01~0)
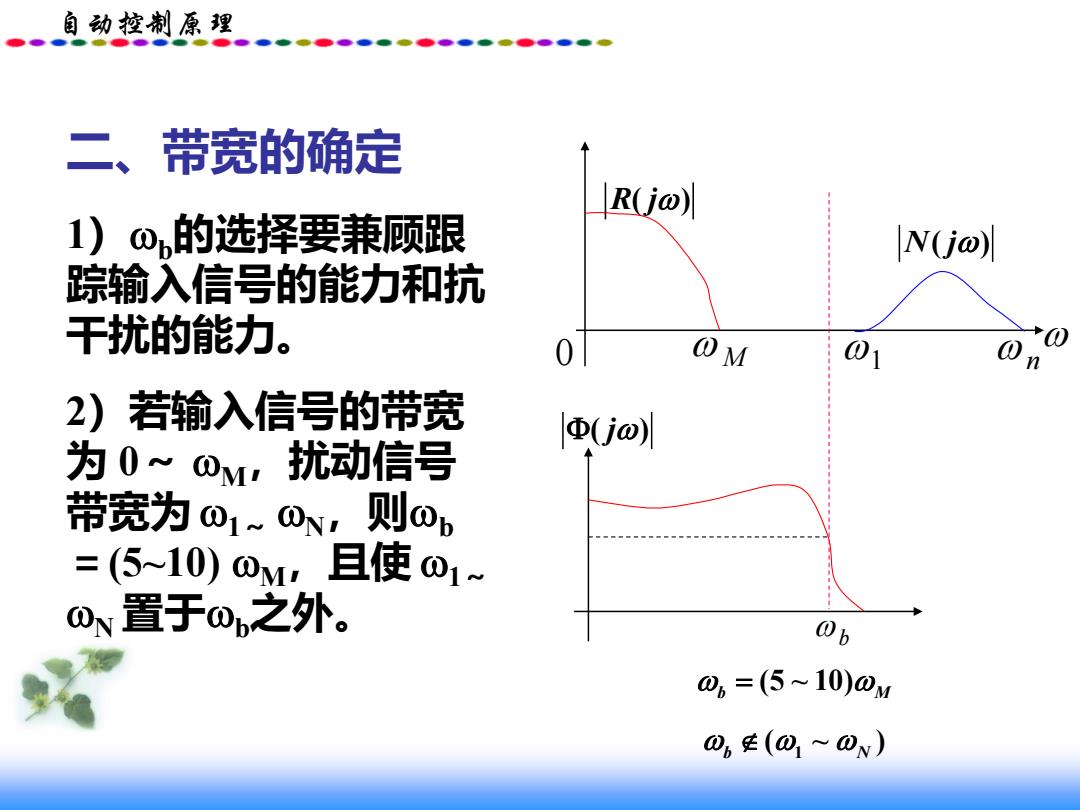
自动控制原理 二、带宽的确定 1)b的选择要兼顾跟 踪输入信号的能力和抗 干扰的能力。 2)若输入信号的带宽 为 0~ M,扰动信号 带宽为 1~ N,则b =(5~10) M,且使 1~ N 置于b之外。 0 M 1 n b R j ( ) N j ( ) ( ) j (5 ~ 10) b M = 1 ( ~ ) b N
自动控制原理 三、校正方式 1、串联校正 R 串联 控制 被控 位于: 校正 器 对象 相加点之后, 放大器之前 2、反馈/并联校正 位于: R 串联 控制 被控 主反馈内部的 校正 器 对象 局部反馈通道 反馈 校正
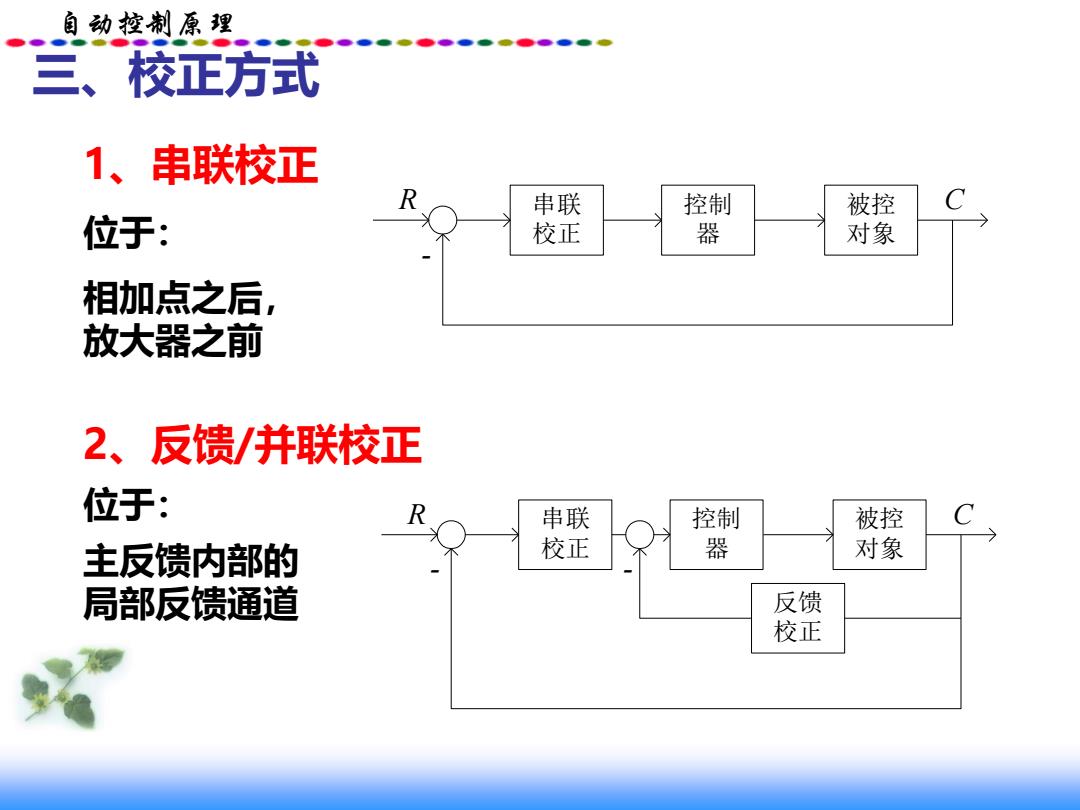
自动控制原理 三、校正方式 1、串联校正 位于: 相加点之后, 放大器之前 被控 对象 控制 器 串联 校正 R C - 2、反馈/并联校正 位于: 主反馈内部的 局部反馈通道 被控 对象 控制 器 串联 校正 反馈 校正 R C - -
自动控制原理 3、前馈/顺馈校正:位于主反馈回路之外 R 前馈 E 控制 被控 校正 器 对象 前馈 N 校正 R E 控制 被控 器 对象 4、复合校正:前馈+反馈校正
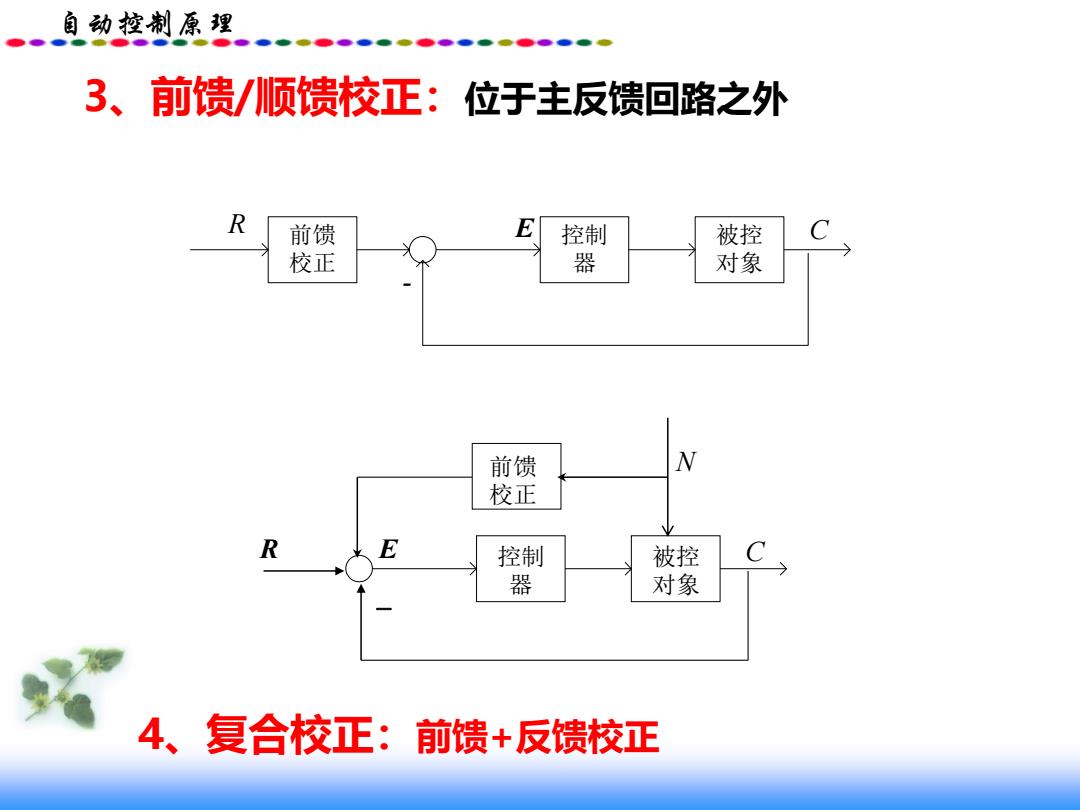
自动控制原理 3、前馈/顺馈校正:位于主反馈回路之外 被控 对象 控制 器 前馈 校正 R C - 被控 对象 控制 器 前馈 校正 N C E E 4、复合校正:前馈+反馈校正 R −

自动控制原理 四、基本控制规律 (以串联校正方式为例) 1、比例控制规律(P控制器) Ge(s)=K。K。→e(o)↓,但稳定性↓ 2、比例微分(PD) 控制规律(主要用于提高动态 性能) m(t)=K,e(t)+K,te'(t) G(s)=K,(1+ts) 增加一个开环零点,同时了增加系统的阻尼程度,改善 系统的稳定性和动态性能。 PID:Proportion Integration Differentiation
自动控制原理 四、基本控制规律(以串联校正方式为例) 1、比例控制规律(P控制器) ( ) G s K c p = K e() p ,但稳定性 2、比例微分(PD) 控制规律(主要用于提高动态 性能) ( ) (1 ) G s K s c p = + 增加一个开环零点,同时了增加系统的阻尼程度,改善 系统的稳定性和动态性能。 (t) (t) (t) m K e K e p p = + PID: Proportion Integration Differentiation
自动控制原理 例6-1:设比例-积分控制系统如图所示,分析PD控制器对 系统性能的影响。 R(s) (S K(1+) C(s) 加入前,系统 Φ(S= 稳定性: 闭环传函为 Js2+1 加入后,系统 K,(1+xs) (S)=J52+K,x5+K, 动态性: 闭环传函为 注意:微分控制D只对动态过程有影响,对稳态过程不 起作用且对噪声敏感,不宜以串联校正方式单独使用!
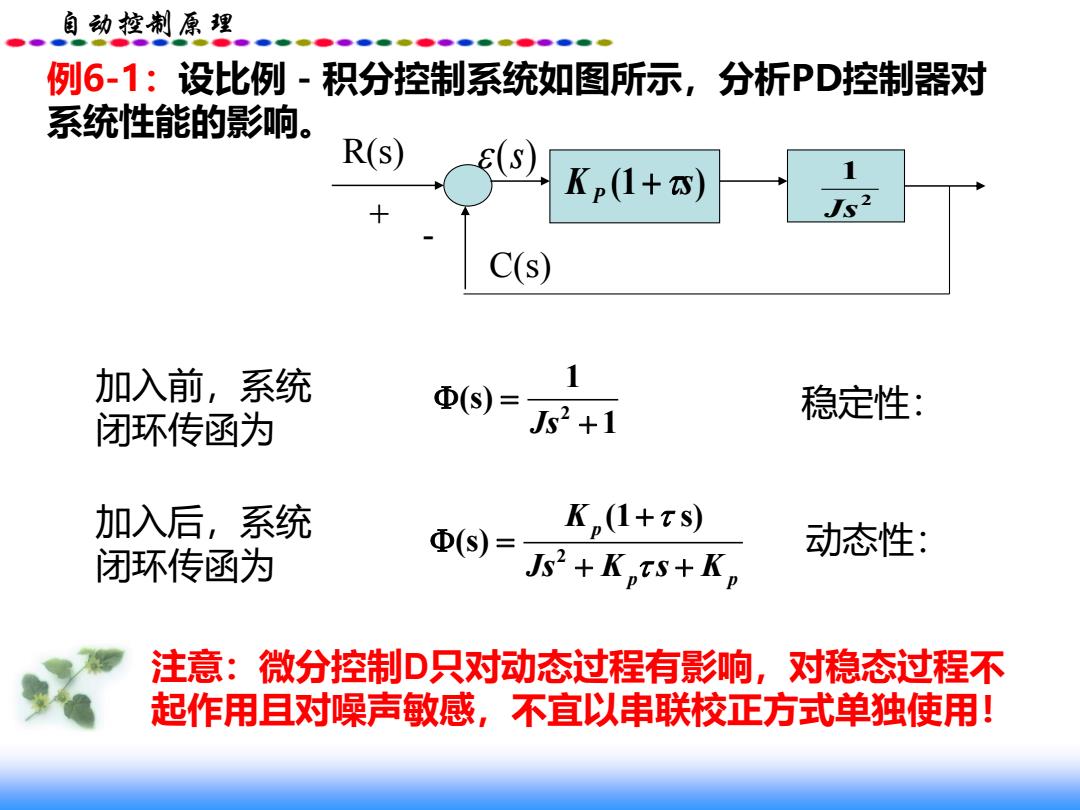
自动控制原理 + - R(s) C(s) (s) K (1 s) P + 2 1 Js 例6-1:设比例-积分控制系统如图所示,分析PD控制器对 系统性能的影响。 加入前,系统 闭环传函为 加入后,系统 闭环传函为 2 1 (s) Js 1 = + 2 (1 s) (s) p p p K Js K s K + = + + 稳定性: 动态性: 注意:微分控制D只对动态过程有影响,对稳态过程不 起作用且对噪声敏感,不宜以串联校正方式单独使用!