单元一机械设计简介 3平面机构的结构分析 S3.1机构的组成 §3.2平面机构的运动简图 S3.3平面机构的自由度 级
§3.1 机构的组成 §3.2 平面机构的运动简图 §3.3 平面机构的自由度 3. 平面机构的结构分析 单元一 机械设计简介
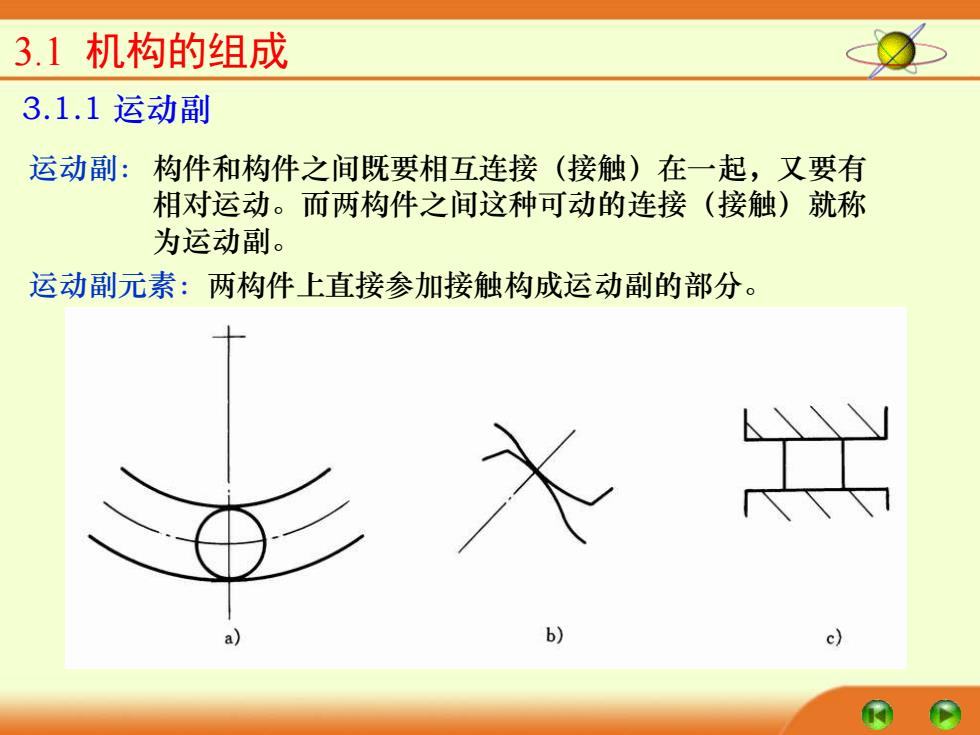
3.1机构的组成 3.1.1运动副 运动副:构件和构件之间既要相互连接(接触)在一起,又要有 相对运动。而两构件之间这种可动的连接(接触)就称 为运动副。 运动副元素:两构件上直接参加接触构成运动副的部分。 树 6
3.1 机构的组成 构件和构件之间既要相互连接(接触)在一起,又要有 相对运动。而两构件之间这种可动的连接(接触)就称 为运动副。 运动副元素:两构件上直接参加接触构成运动副的部分。 3.1.1 运动副 运动副:
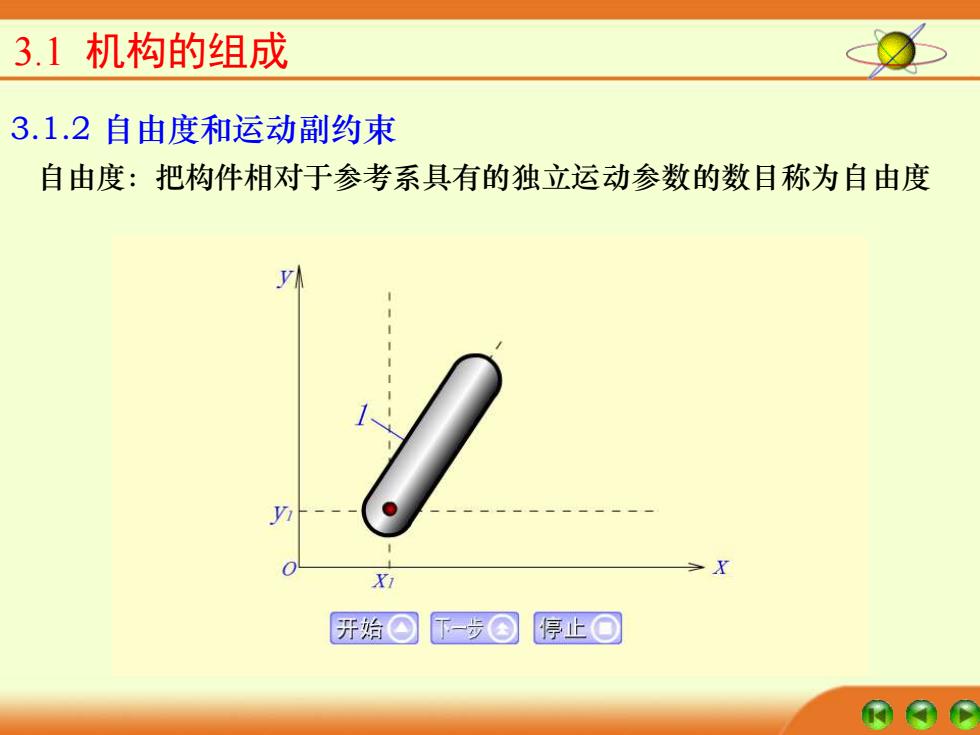
3.1机构的组成 3.1.2自由度和运动副约束 自由度:把构件相对于参考系具有的独立运动参数的数目称为自由度 X X 开始闷一步④停止可
3.1 机构的组成 3.1.2 自由度和运动副约束 自由度:把构件相对于参考系具有的独立运动参数的数目称为自由度

3.1机构的组成 一、平面运动副 按两构件接触情况,常分为低副、高副两大类。 1.低副两构件以面接触而形成的运动副。 (1)转动副:只允许两构件作相对转动,又称作铰链。 a)固定铰链
按两构件接触情况,常分为低副、高副两大类。 1.低副 两构件以面接触而形成的运动副。 (1) 转动副:只允许两构件作相对转动,又称作铰链。 a)固定铰链 3.1 机构的组成 一、平面运动副
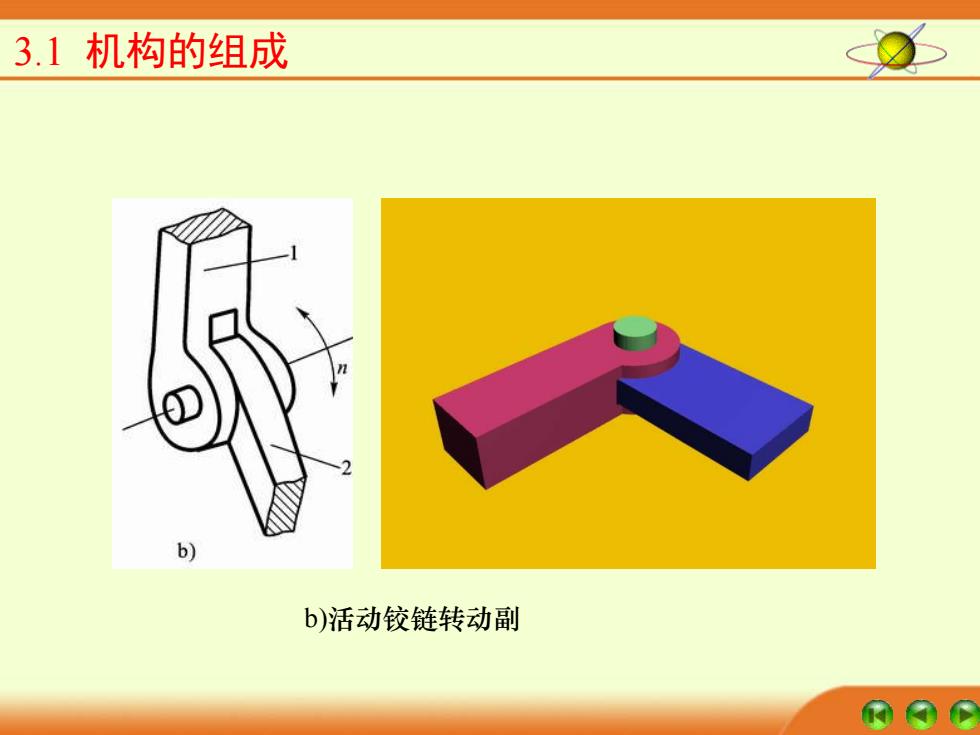
3.1机构的组成 b)活动铰链转动副
b)活动铰链转动副 3.1 机构的组成