单元二常用机械机构 4平面连杆机构 S4.1概述 §4.2 平面机构的运动分析 §4.3平面机构的力分析 S4.4四杆机构的基本形式及其演化 §4.5平面四杆机构的基本特性 §4.6平面四杆机构的设计
§4.1 概述 §4.2 平面机构的运动分析 §4.3 平面机构的力分析 §4.4 四杆机构的基本形式及其演化 §4.5 平面四杆机构的基本特性 §4.6 平面四杆机构的设计 4 平面连杆机构 单元二 常用机械机构

4.1概述 平面连杆机构是由若干个构件通过低副联接而成的机构,又称为平面低 副机构。 由四个构件通过低副联接而成的平面连杆机构,称为四杆机构。 如果所有低副均为转动副,这种四杆机构就称为铰链四杆机构。 平面连杆机构的优点 ■由于是低副,为面接触,所以承受压强小、便于润滑、磨损较轻,可 承受较大载荷 ■结构简单,加工方便,构件之间的接触是有构件本身的几何约束来保 持的,所以构件工作可靠 ■可使从动件实现多种形式的运动,满足多种运动规律的要求 ■利用平面连杆机构中的连杆可满足多种运动轨迹的要求 平面连杆机构的缺点 ■根据从动件所需要的运动规律或轨迹来设计连杆机构比较复杂,精度不高。 ■运动时产生的惯性难以平衡,不适用于高速场合
4.1 概述 平面连杆机构是由若干个构件通过低副联接而成的机构,又称为平面低 副机构。 由四个构件通过低副联接而成的平面连杆机构,称为四杆机构。 如果所有低副均为转动副,这种四杆机构就称为铰链四杆机构。 平面连杆机构的优点 由于是低副,为面接触,所以承受压强小、便于润滑、磨损较轻,可 承受较大载荷 结构简单,加工方便,构件之间的接触是有构件本身的几何约束来保 持的,所以构件工作可靠 可使从动件实现多种形式的运动,满足多种运动规律的要求 利用平面连杆机构中的连杆可满足多种运动轨迹的要求 平面连杆机构的缺点 根据从动件所需要的运动规律或轨迹来设计连杆机构比较复杂,精度不高。 运动时产生的惯性难以平衡,不适用于高速场合
4.2平面机构的运动分析 机构的运动分析:已知机构中主动件的运动,求解机构中其他各构件的运 动状态。 通过机构的运动分析可了解机构在运动过程中构件上某些点的位移、 速度和加速度以及构件的角位移、角速度和角加速度。 本节主要介绍用相对运动图解法求机构的速度和加速度的方法
4.2 平面机构的运动分析 已知机构中主动件的运动,求解机构中其他各构件的运 动状态。 机构的运动分析: 通过机构的运动分析可了解机构在运动过程中构件上某些点的位移、 速度和加速度以及构件的角位移、角速度和角加速度。 本节主要介绍用相对运动图解法求机构的速度和加速度的方法
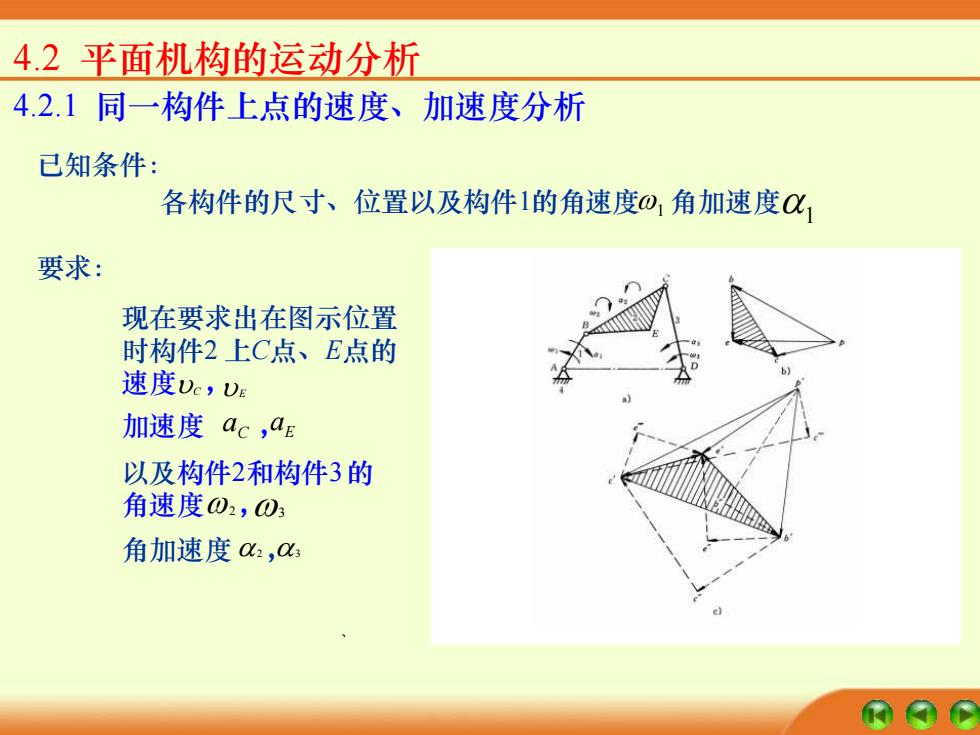
4.2平面机构的运动分析 4.2.1同一构件上点的速度、加速度分析 已知条件: 各构件的尺寸、位置以及构件1的角速度0,角加速度0心1 要求: 现在要求出在图示位置 时构件2上C点、E点的 速度De,DE 加速度ac,aE 以及构件2和构件3的 角速度02,⊙ 角加速度
4.2.1 同一构件上点的速度、加速度分析 已知条件: 各构件的尺寸、位置以及构件1的角速度 1 角加速度 1 要求: 、 现在要求出在图示位置 时构件2 上C点、E点的 速度 C , E 加速度 aC , E a 以及构件2和构件3 的 角速度 2 , 3 角加速度 2 , 3 4.2 平面机构的运动分析
4.2平面机构的运动分析 1.速度分析 (1)求UB)B=OL4B,方向垂直于AB,指向与D的转向一致。 (2)求Uc B点与C点同为构件2上的点,根据理论力学,做平面 运动的刚体上某一点的速度可以看作是刚体上任选基点 的牵连速度和该点绕基点的相对转动速度的合成。因此 构件2上C点的速度等于B点的速度与C点相对B点的 速度矢量和,即 Vc DE UCB 大小 @lA ? 方向 ⊥CD ⊥AB ⊥BC
4.2 平面机构的运动分析 1.速度分析 (1)求 B B =1l AB ,方向垂直于AB,指向与 1 的转向一致。 (2)求 C B 点与 C 点同为构件 2 上的点,根据理论力学,做平面 运动的刚体上某一点的速度可以看作是刚体上任选基点 的牵连速度和该点绕基点的相对转动速度的合成。因此 构件 2 上 C 点的速度等于B 点的速度与 C 点相对 B 点的 速度矢量和,即 C = B + CB 大小 方向 ⊥CD ⊥ AB ⊥ BC ? 1l AB ?