本章目录 少求理2大军 第7章基于动态模型的异步电动机调速系统 7.1异步电动机动态数学模型的性质 7.2异步电动机的三相数学模型 7.3坐标变换 7.4异步电动机在正交坐标系上的动态数学模型 7.5异步电动机在正交坐标系上的状态方程 7.6异步电动机按转子磁链定向的矢量控制系统 7.7异步电动机按定子磁链控制的直接转矩控制系统 7.8直接转矩控制系统与矢量控制系统的比较 电气与电子工程学院自动化系
电气与电子工程学院自动化系 本章目录 第7章 基于动态模型的异步电动机调速系统 7.1 异步电动机动态数学模型的性质 7.2 异步电动机的三相数学模型 7.3 坐标变换 7.4 异步电动机在正交坐标系上的动态数学模型 7.5 异步电动机在正交坐标系上的状态方程 7.6 异步电动机按转子磁链定向的矢量控制系统 7.7 异步电动机按定子磁链控制的直接转矩控制系统 7.8 直接转矩控制系统与矢量控制系统的比较
7.6异步电动机按转子磁链定向的矢量控制系统 山东理子大军 按转子磁链定向矢量控制的基本思想: 口通过坐标变换,在按转子磁链定向同步旋转正交坐标系中,得到等效的直 流电动机模型。 口仿照直流电动机的控制方法控制电滋转矩与滋链,然后将转子磁链定向坐 标系中的控制量反变换得到三相坐标系的对应量,以实施控制。 由于变换的是矢量,所以这样的坐标变换也可称作矢量变换,相应的控 制系统称为矢量控制(Vector Control简称VC)系统或按转子磁链定向 控制(Flux Orientation Controlf简称FOC)系统。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 7.6 异步电动机按转子磁链定向的矢量控制系统 按转子磁链定向矢量控制的基本思想: 通过坐标变换,在按转子磁链定向同步旋转正交坐标系中,得到等效的直 流电动机模型。 仿照直流电动机的控制方法控制电磁转矩与磁链,然后将转子磁链定向坐 标系中的控制量反变换得到三相坐标系的对应量,以实施控制。 由于变换的是矢量,所以这样的坐标变换也可称作矢量变换,相应的控 制系统称为矢量控制(Vector Control 简称VC)系统或按转子磁链定向 控制(Flux Orientation Control简称FOC)系统
矢量控制中的基本问题 山求程子大军 口矢量控制的基本原理 口矢量控制的系统结构 ▣矢量控制性能好的本质原因分析 ▣转子磁链估算 ▣间接定向的矢量控制 口转矩控制方式 电气与电子工程学院自动化系
电气与电子工程学院自动化系 矢量控制中的基本问题 矢量控制的基本原理 矢量控制的系统结构 矢量控制性能好的本质原因分析 转子磁链估算 间接定向的矢量控制 转矩控制方式
主要内容 中东理子大军 7.6异步电动机按转子磁链定向的矢量控制系统 7.6.1按转子磁链定向的同步旋转正交坐标系状态方程 7.6.2按转子磁链定向矢量控制的基本思想 7.6.3按转子磁链定向矢量控制系统的电流闭环控制方式 7.6.4按转子磁链定向矢量控制系统的转矩控制方式 7.6.5转子磁链计算 7.6.6磁链开环转差型矢量控制系统—间接定向 7.6.7矢量控制系统的特点与存在的问题 电气与电子工程学院自动化系
电气与电子工程学院自动化系 主要内容 7.6 异步电动机按转子磁链定向的矢量控制系统 7.6.1 按转子磁链定向的同步旋转正交坐标系状态方程 7.6.2 按转子磁链定向矢量控制的基本思想 7.6.3 按转子磁链定向矢量控制系统的电流闭环控制方式 7.6.4 按转子磁链定向矢量控制系统的转矩控制方式 7.6.5 转子磁链计算 7.6.6 磁链开环转差型矢量控制系统——间接定向 7.6.7 矢量控制系统的特点与存在的问题
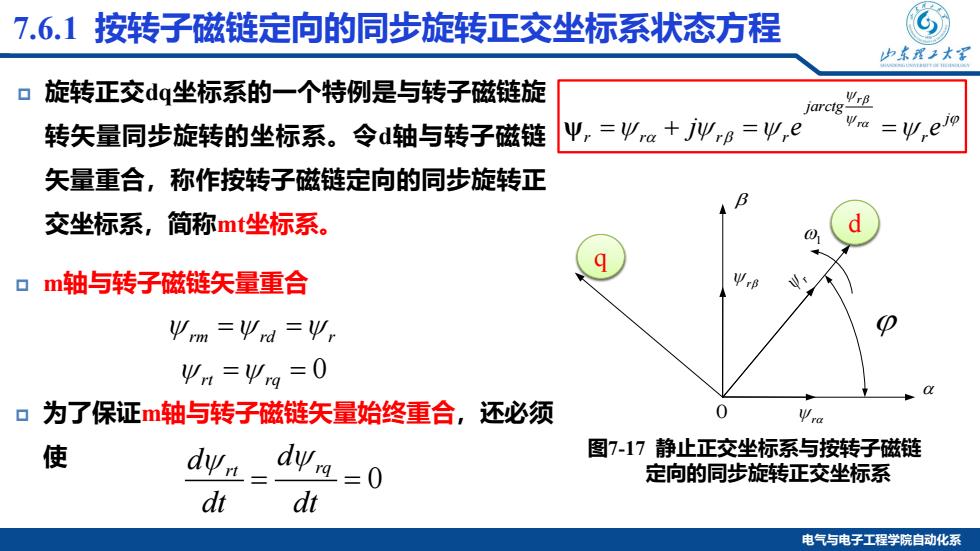
7.6.1按转子磁链定向的同步旋转正交坐标系状态方程 少求理2大军 口旋转正交dq坐标系的一个特例是与转子磁链旋 转矢量同步旋转的坐标系。令轴与转子磁链 Ψ,=ya+jyg=y,ea=y,e 矢量重合,称作按转子磁链定向的同步旋转正 B 交坐标系,简称mt坐标系。 q 口m轴与转子磁链矢量重合 Ψm=Ψrd=业, Ψmn=业g=0 口为了保证轴与转子磁链矢量始终重合,还必须 0 Wra 使 dΨ二0 图7-17静止正交坐标系与按转子磁链 定向的同步旋转正交坐标系 dt dt 电气与电子工程学院自动化系
电气与电子工程学院自动化系 t m 0 α ϕ ω1 β r ψ ψ rα ψ rβ m t 7.6.1 按转子磁链定向的同步旋转正交坐标系状态方程 图7-17 静止正交坐标系与按转子磁链 定向的同步旋转正交坐标系 m轴与转子磁链矢量重合 为了保证m轴与转子磁链矢量始终重合,还必须 使 0 rm rd r rt rq ψψψ ψ ψ = = = = 0 rt rq d d dt dt ψ ψ = = r r jarctg j rr r r r je e β α ψ ψ ϕ ψ =+ = = ψ ψψ ψ α β 旋转正交dq坐标系的一个特例是与转子磁链旋 转矢量同步旋转的坐标系。令d轴与转子磁链 矢量重合,称作按转子磁链定向的同步旋转正 交坐标系,简称mt坐标系。 d q