晶闸管电动机开环直流调速系统案例分析 摘要:介绍了常见的电动机开环直流调速系统案例,引入了晶闸管电动机开环直流调速系统, 从主电路结构、控制电路两个方面分析了晶闸管电动机开环直流调速系统的组成,研究了开 环系统的机械特性,详细分析了系统在起动、抗扰动、制动等动态工作过程。 0案例研究思维导图 1案例说明 1)品闸管相控整流器供电电路 2.1主电路 2)平波电抗器 2开环直流调速系统的组成 3)直流电动机负载 1)触发电路 22控制电路 品闸管电动机 2)给定环节 3开环系统的机械特性 41起动过程分析 4开环系统的动态工作过程 42抗扰动分析 43制动过程分析 1案例说明 在生产实践中,许多设备直流调速系统的精度要求不很高,例如,如图1所示的小功率 直流电钻、水泵抽水控制系统、家用窗帘自动控制系统、自动升旗控制系统、普通全自动洗 衣机控制系统、普通电风扇控制系统、宾馆自动门控制系统等。这些设备大都采用开环结构 设计,调速方法也较简单,基本上都属于调压调速方式。通常,这种开环直流调速系统采用 如图2所示的原理图,即V-M(晶闸管电动机)开环直流调速系统。 控制器 执行器 输出重 (控制电路》 (a)水泵抽水控制系统
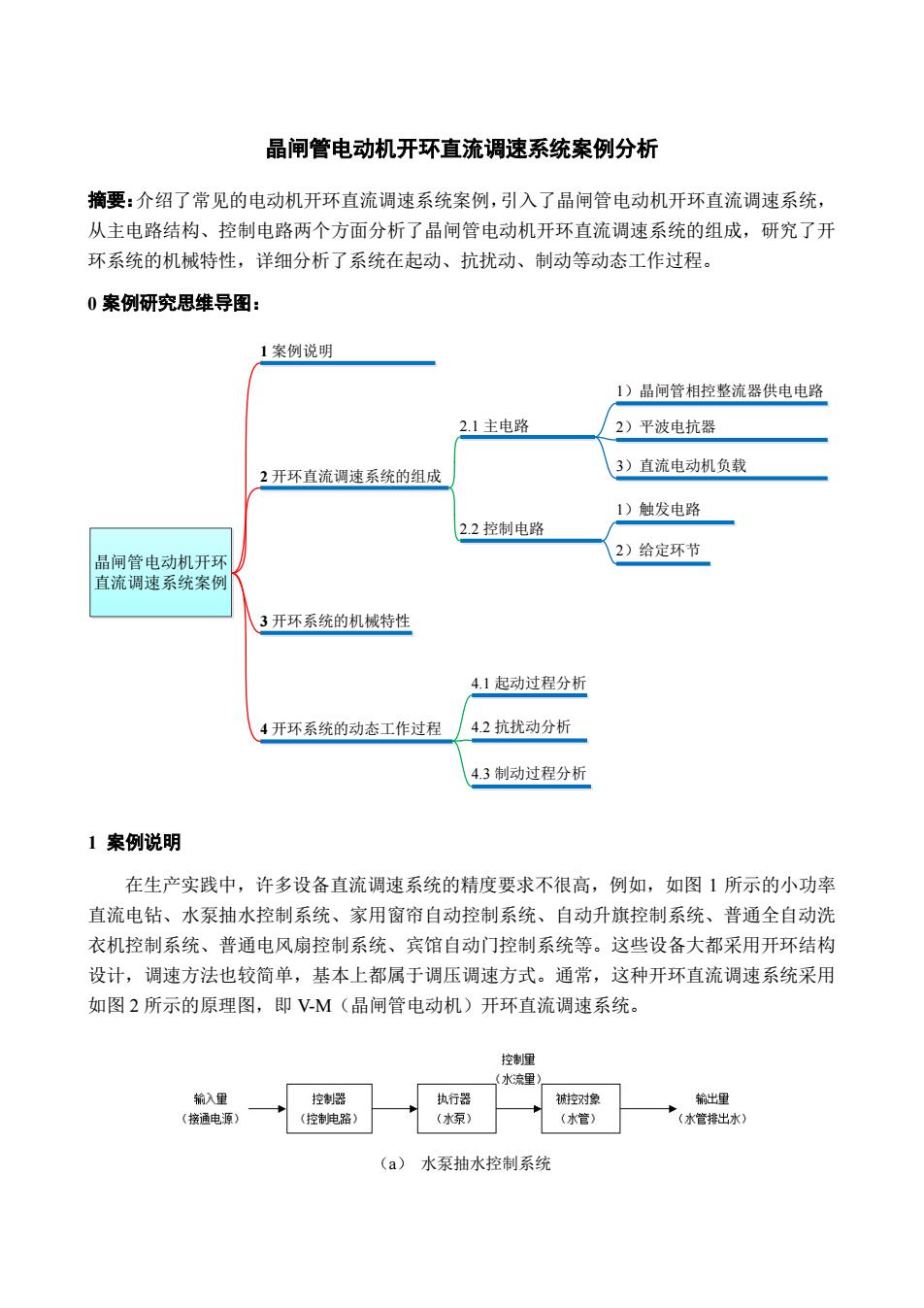
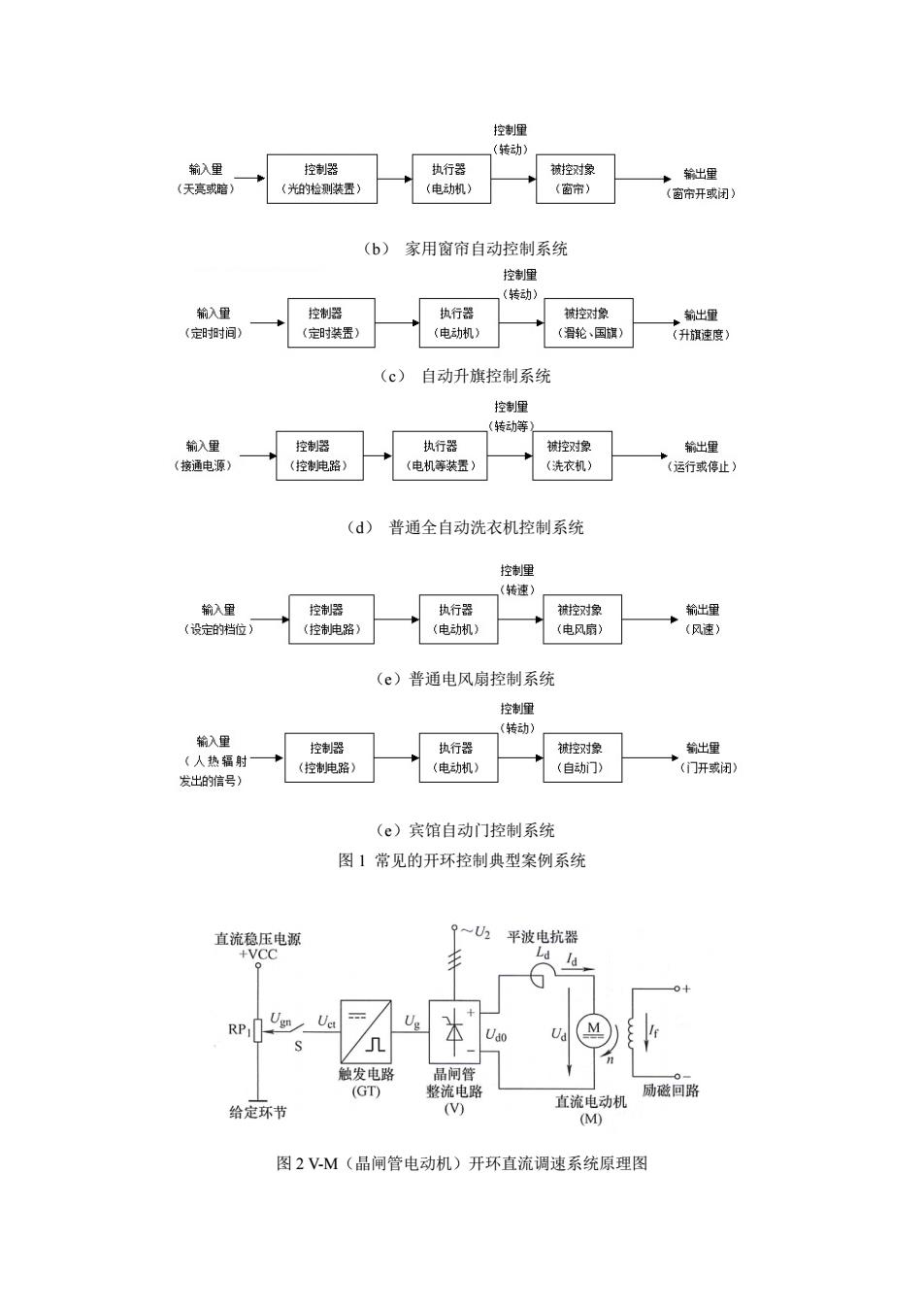
晶闸管电动机开环直流调速系统案例分析 摘要:介绍了常见的电动机开环直流调速系统案例,引入了晶闸管电动机开环直流调速系统, 从主电路结构、控制电路两个方面分析了晶闸管电动机开环直流调速系统的组成,研究了开 环系统的机械特性,详细分析了系统在起动、抗扰动、制动等动态工作过程。 0 案例研究思维导图: 晶闸管电动机开环 直流调速系统案例 1 案例说明 2 开环直流调速系统的组成 4 开环系统的动态工作过程 3 开环系统的机械特性 2.2 控制电路 4.1 起动过程分析 2.1 主电路 2)给定环节 1)触发电路 4.2 抗扰动分析 4.3 制动过程分析 1)晶闸管相控整流器供电电路 2)平波电抗器 3)直流电动机负载 1 案例说明 在生产实践中,许多设备直流调速系统的精度要求不很高,例如,如图 1 所示的小功率 直流电钻、水泵抽水控制系统、家用窗帘自动控制系统、自动升旗控制系统、普通全自动洗 衣机控制系统、普通电风扇控制系统、宾馆自动门控制系统等。这些设备大都采用开环结构 设计,调速方法也较简单,基本上都属于调压调速方式。通常,这种开环直流调速系统采用 如图 2 所示的原理图,即 V-M(晶闸管电动机)开环直流调速系统。 (a) 水泵抽水控制系统
控制器 执行器 控对象 (光的检铁置) (b)家用窗帘自动控制系统 输入里 控制器 了执行器 被控对象 (定时同) (时装置) (电湖) (智轮、国惯) (c)自动升旗控制系统 控制烂 执行器 锁控橡 (控荆电路) (电机等装置) (洗衣机) (d)普通全自动洗衣机控制系统 控 《转速) → (e)普通电风扇控制系统 控制量 输入里 一 被控对象 输出 发出的信号 自动门) →(们开闭 (©)宾馆自动门控制系统 图1常见的开环控制典型案例系统 直流稳电源 了一2平被电抗器 0 1+ U 电 励磁回路 给定环节 (V) 直流电动机 (M) 图2VM(晶闸管电动机)开环直流调速系统原理图
(b) 家用窗帘自动控制系统 (c) 自动升旗控制系统 (d) 普通全自动洗衣机控制系统 (e)普通电风扇控制系统 (e)宾馆自动门控制系统 图 1 常见的开环控制典型案例系统 图 2 V-M(晶闸管电动机)开环直流调速系统原理图
2开环直流调速系统的组成 根据图2所示的由晶闸管变流器组成的VM开环调速系统的原理图可得,其组成结构框 图如图3所示。它的组成包括电力主电路和电子控制电路两部分,其中主电路由晶闸管组成 的可控变流器(以V表示,此处也称晶闸管相控整流器,简称晶闸管整流器)、直流电动机 (M)、平波电抗器(L)一同构成,是强电电路。控制电路由给定环节、触发环节构成,是 弱电电路。 器器酷蔬 图3VM开环调速系统组成结构框图 2.1主电路 1)晶闸管相控整流器供电电路(V),其作用是将交流电变成大小可调的直流电。从变 压器的利用率和晶闸管的耐压值方面考虑,在工程上常用相控整流器的接线形式有单相半控 桥、单相全控桥、三相半波、三相全控桥、更多相整流电路等类型。 晶闸管相控整流器接线形式的选择应根据负载电动机容量的大小、是否有可逆运行工作 状态和对电流波形脉动情况的要求而定。4kW以下的负载,对电流波形脉动性要求不高的一 般选单相可控整流电路,如果负载要求可逆运行的,选单相全控桥电路:不要求可逆运行的, 选单相半控桥电路。4kW以上的负载,并要求电流波形脉动小的,一般选三相全控桥可控整 流电路。特大功率的整流装置,为了减小谐波成分对电网的影响,可采用12相或12相以上 的多相整流电路。 晶闸管整流器在晶闸管选择上要注意,晶闸管的额定电流是用整流电流的最大通态平均 值来定义的,而晶闸管和电动机能通过多大的电流,是由电流通过它产生的热量来决定,即 与整流电流的有效值有关。因此,晶闸管导通角不同,整流电流的波形不同,会使相同的平 均值对应的有效值不同。当晶闸管导通角小时,同样的平均电流使它对应的有效值要大得多, 器件发热也严重得多。根据这个特点在选择直流开环调速系统中的其他元器件如电动机容量、 平波电抗器和快速熔晰器时应该引起注意。 在使用晶闸管整流器中的晶闸管时也要注意,由于晶闸管的单向导电性,使系统的可逆 运行出现困难,如要实现可逆运行,则需采用接触器或者采用两组晶闸管整流器反并联连接 或交叉连接才行(参见电力电子技术课程的有关内容)。晶闸管对过电压、过电流以及过高的 dudt和di/dt都很敏感,因此晶闸管整流电路必须设置许多保护环节,如阻容吸收过电压保护 压敏电阻过电压保护、灵敏过电流继电器过电流保护、快速熔断器短路保护等。当系统处在 深调速状态时,由于晶闸管的导通角很小,使得系统的功率因数较低,易产生较大的谐波电 流,引起电网电压畸变,殃及附近的用电设备,若其设备容量在电网中所占比重较大,必须
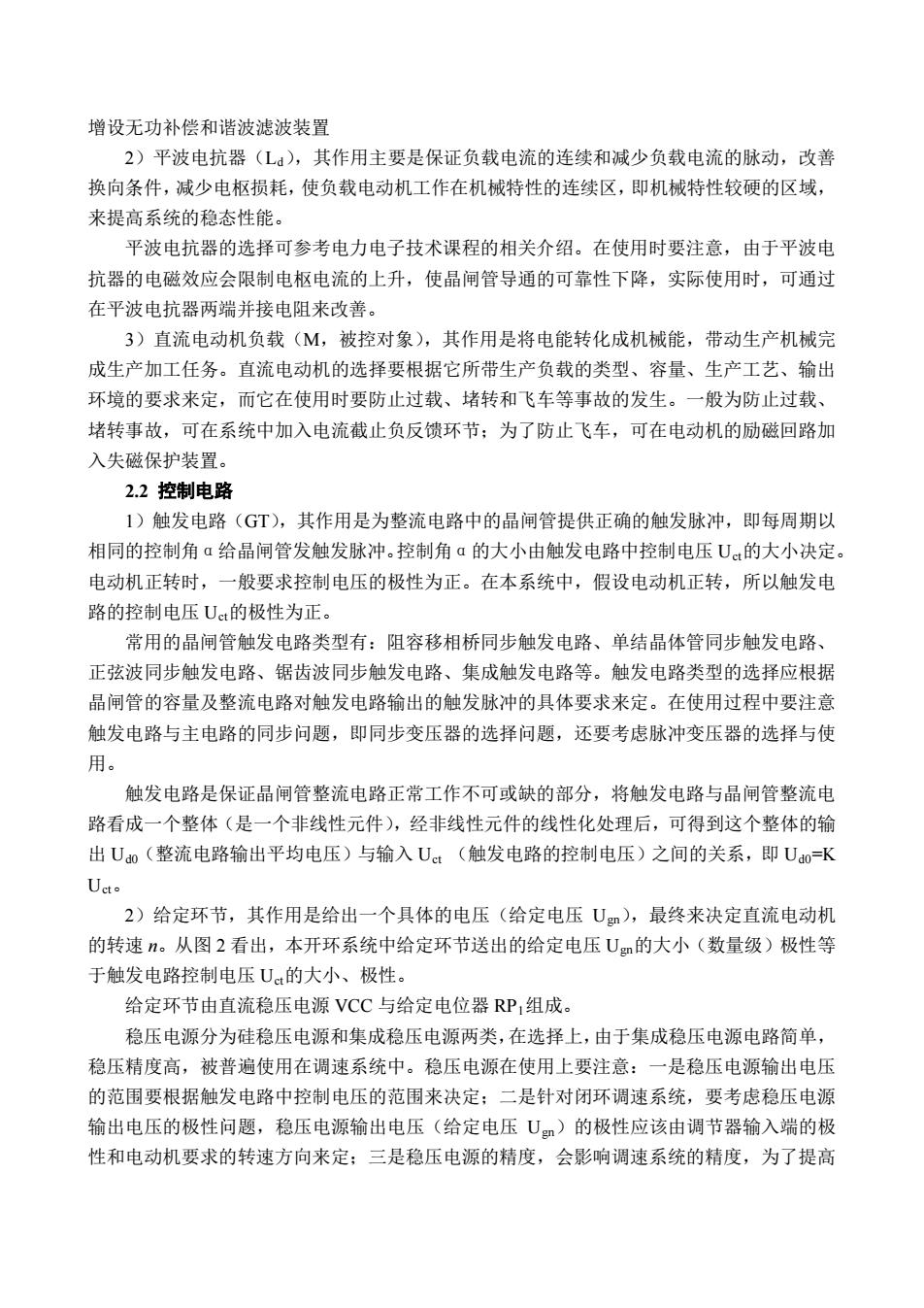
2 开环直流调速系统的组成 根据图 2 所示的由晶闸管变流器组成的 V-M 开环调速系统的原理图可得,其组成结构框 图如图 3 所示。它的组成包括电力主电路和电子控制电路两部分,其中主电路由晶闸管组成 的可控变流器(以Ⅴ表示,此处也称晶闸管相控整流器,简称晶闸管整流器)、直流电动机 (M)、平波电抗器(Ld)一同构成,是强电电路。控制电路由给定环节、触发环节构成,是 弱电电路。 图 3 V-M 开环调速系统组成结构框图 2.1 主电路 1)晶闸管相控整流器供电电路(V),其作用是将交流电变成大小可调的直流电。从变 压器的利用率和晶闸管的耐压值方面考虑,在工程上常用相控整流器的接线形式有单相半控 桥、单相全控桥、三相半波、三相全控桥、更多相整流电路等类型。 晶闸管相控整流器接线形式的选择应根据负载电动机容量的大小、是否有可逆运行工作 状态和对电流波形脉动情况的要求而定。4kW 以下的负载,对电流波形脉动性要求不高的一 般选单相可控整流电路,如果负载要求可逆运行的,选单相全控桥电路;不要求可逆运行的, 选单相半控桥电路。4kW 以上的负载,并要求电流波形脉动小的,一般选三相全控桥可控整 流电路。特大功率的整流装置,为了减小谐波成分对电网的影响,可采用 12 相或 12 相以上 的多相整流电路。 晶闸管整流器在晶闸管选择上要注意,晶闸管的额定电流是用整流电流的最大通态平均 值来定义的,而晶闸管和电动机能通过多大的电流,是由电流通过它产生的热量来决定,即 与整流电流的有效值有关。因此,晶闸管导通角不同,整流电流的波形不同,会使相同的平 均值对应的有效值不同。当晶闸管导通角小时,同样的平均电流使它对应的有效值要大得多, 器件发热也严重得多。根据这个特点在选择直流开环调速系统中的其他元器件如电动机容量、 平波电抗器和快速熔断器时应该引起注意。 在使用晶闸管整流器中的晶闸管时也要注意,由于晶闸管的单向导电性,使系统的可逆 运行出现困难,如要实现可逆运行,则需采用接触器或者采用两组晶闸管整流器反并联连接 或交叉连接才行(参见电力电子技术课程的有关内容)。晶闸管对过电压、过电流以及过高的 du/dt 和 di/dt 都很敏感,因此晶闸管整流电路必须设置许多保护环节,如阻容吸收过电压保护、 压敏电阻过电压保护、灵敏过电流继电器过电流保护、快速熔断器短路保护等。当系统处在 深调速状态时,由于晶闸管的导通角很小,使得系统的功率因数较低,易产生较大的谐波电 流,引起电网电压畸变,殃及附近的用电设备,若其设备容量在电网中所占比重较大,必须
增设无功补偿和谐波滤波装置 2)平波电抗器(L),其作用主要是保证负载电流的连续和减少负载电流的脉动,改善 换向条件,减少电枢损耗,使负载电动机工作在机械特性的连续区,即机械特性较硬的区域, 来提高系统的稳态性能。 平波电抗器的选择可参考电力电子技术课程的相关介绍。在使用时要注意,由于平波电 抗器的电磁效应会限制电枢电流的上升,使晶闸管导通的可靠性下降,实际使用时,可通过 在平波电抗器两端并接电阻来改善。 3)直流电动机负载(M,被控对象),其作用是将电能转化成机械能,带动生产机械完 成生产加工任务。直流电动机的选择要根据它所带生产负载的类型、容量、生产工艺、输出 环境的要求来定,而它在使用时要防止过载、堵转和飞车等事故的发生。一般为防止过载、 堵转事故,可在系统中加入电流截止负反馈环节;为了防止飞车,可在电动机的励磁回路加 入失磁保护装置。 2.2控制电路 1)触发电路(GT),其作用是为整流电路中的晶闸管提供正确的触发脉冲,即每周期以 相同的控制角α给晶闸管发触发脉冲。控制角ā的大小由触发电路中控制电压U:的大小决定。 电动机正转时,一般要求控制电压的极性为正。在本系统中,假设电动机正转,所以触发电 路的控制电压Ut的极性为正。 常用的晶闸管触发电路类型有:阻容移相桥同步触发电路、单结晶体管同步触发电路、 正弦波同步触发电路、锯齿波同步触发电路、集成触发电路等。触发电路类型的选择应根据 晶闸管的容量及整流电路对触发电路输出的触发脉冲的具体要求来定。在使用过程中要注意 触发电路与主电路的同步问题,即同步变压器的选择问题,还要考虑脉冲变压器的选择与使 用。 触发电路是保证晶闸管整流电路正常工作不可或缺的部分,将触发电路与晶闸管整流电 路看成一个整体(是一个非线性元件),经非线性元件的线性化处理后,可得到这个整体的输 出U0(整流电路输出平均电压)与输入U:(触发电路的控制电压)之间的关系,即Uo=K 2)给定环节,其作用是给出一个具体的电压(给定电压U),最终来决定直流电动机 的转速n。从图2看出,本开环系统中给定环节送出的给定电压Um的大小(数量级)极性等 于触发电路控制电压U的大小、极性。 给定环节由直流稳压电源VCC与给定电位器RP,组成。 稳压电源分为硅稳压电源和集成稳压电源两类,在选择上,由于集成稳压电源电路简单, 稳压精度高,被普遍使用在调速系统中。稳压电源在使用上要注意:一是稳压电源输出电压 的范围要根据触发电路中控制电压的范围来决定;二是针对闭环调速系统,要考虑稳压电源 输出电压的极性问题,稳压电源输出电压(给定电压U)的极性应该由调节器输入端的极 性和电动机要求的转速方向来定:三是稳压电源的精度,会影响调速系统的精度,为了提高
增设无功补偿和谐波滤波装置 2)平波电抗器(Ld),其作用主要是保证负载电流的连续和减少负载电流的脉动,改善 换向条件,减少电枢损耗,使负载电动机工作在机械特性的连续区,即机械特性较硬的区域, 来提高系统的稳态性能。 平波电抗器的选择可参考电力电子技术课程的相关介绍。在使用时要注意,由于平波电 抗器的电磁效应会限制电枢电流的上升,使晶闸管导通的可靠性下降,实际使用时,可通过 在平波电抗器两端并接电阻来改善。 3)直流电动机负载(M,被控对象),其作用是将电能转化成机械能,带动生产机械完 成生产加工任务。直流电动机的选择要根据它所带生产负载的类型、容量、生产工艺、输出 环境的要求来定,而它在使用时要防止过载、堵转和飞车等事故的发生。一般为防止过载、 堵转事故,可在系统中加入电流截止负反馈环节;为了防止飞车,可在电动机的励磁回路加 入失磁保护装置。 2.2 控制电路 1)触发电路(GT),其作用是为整流电路中的晶闸管提供正确的触发脉冲,即每周期以 相同的控制角α给晶闸管发触发脉冲。控制角α的大小由触发电路中控制电压 Uct的大小决定。 电动机正转时,一般要求控制电压的极性为正。在本系统中,假设电动机正转,所以触发电 路的控制电压 Uct的极性为正。 常用的晶闸管触发电路类型有:阻容移相桥同步触发电路、单结晶体管同步触发电路、 正弦波同步触发电路、锯齿波同步触发电路、集成触发电路等。触发电路类型的选择应根据 晶闸管的容量及整流电路对触发电路输出的触发脉冲的具体要求来定。在使用过程中要注意 触发电路与主电路的同步问题,即同步变压器的选择问题,还要考虑脉冲变压器的选择与使 用。 触发电路是保证晶闸管整流电路正常工作不可或缺的部分,将触发电路与晶闸管整流电 路看成一个整体(是一个非线性元件),经非线性元件的线性化处理后,可得到这个整体的输 出 Ud0(整流电路输出平均电压)与输入 Uct (触发电路的控制电压)之间的关系,即 Ud0=K Uct。 2)给定环节,其作用是给出一个具体的电压(给定电压 Ugn),最终来决定直流电动机 的转速 n。从图 2 看出,本开环系统中给定环节送出的给定电压 Ugn的大小(数量级)极性等 于触发电路控制电压 Uct的大小、极性。 给定环节由直流稳压电源 VCC 与给定电位器 RP1组成。 稳压电源分为硅稳压电源和集成稳压电源两类,在选择上,由于集成稳压电源电路简单, 稳压精度高,被普遍使用在调速系统中。稳压电源在使用上要注意:一是稳压电源输出电压 的范围要根据触发电路中控制电压的范围来决定;二是针对闭环调速系统,要考虑稳压电源 输出电压的极性问题,稳压电源输出电压(给定电压 Ugn)的极性应该由调节器输入端的极 性和电动机要求的转速方向来定;三是稳压电源的精度,会影响调速系统的精度,为了提高
调速系统精度,提供给定电压信号的稳压电源必须具有良好的稳定性。 3开环系统的机械特性 从开环调速系统的原理图及组成结构框图出发,在保证电流连续情况下系统各环节的稳 态输入输出关系如下。 给定环节: U=U。 晶闸管整流与触发装置:U=K,U。 VM环节特性: U.=U-I(R+R) E=Ul4R。 是 C。=KD、 以上各式中,UmU为系统给定电压(V):UU为触发电路的控制电压(V):K,为晶 闸管整流器与触发装置的电压放大系数:C,为电动机额定励磁下的电动势转速比(Vmi)。 将上述几个方程联立求解得 kU_no-An C。C. 式中,nt为开环系统的理想空载转速:△n,为开环系统的稳态速降:R为晶闸管整流器 等效电阻RT平波电抗器等效电阻RL以及电动机电枢电阻R之和,开环调速系统的机械特性 曲线如图4所示。 0 图4开环调速系统的机械特性曲线
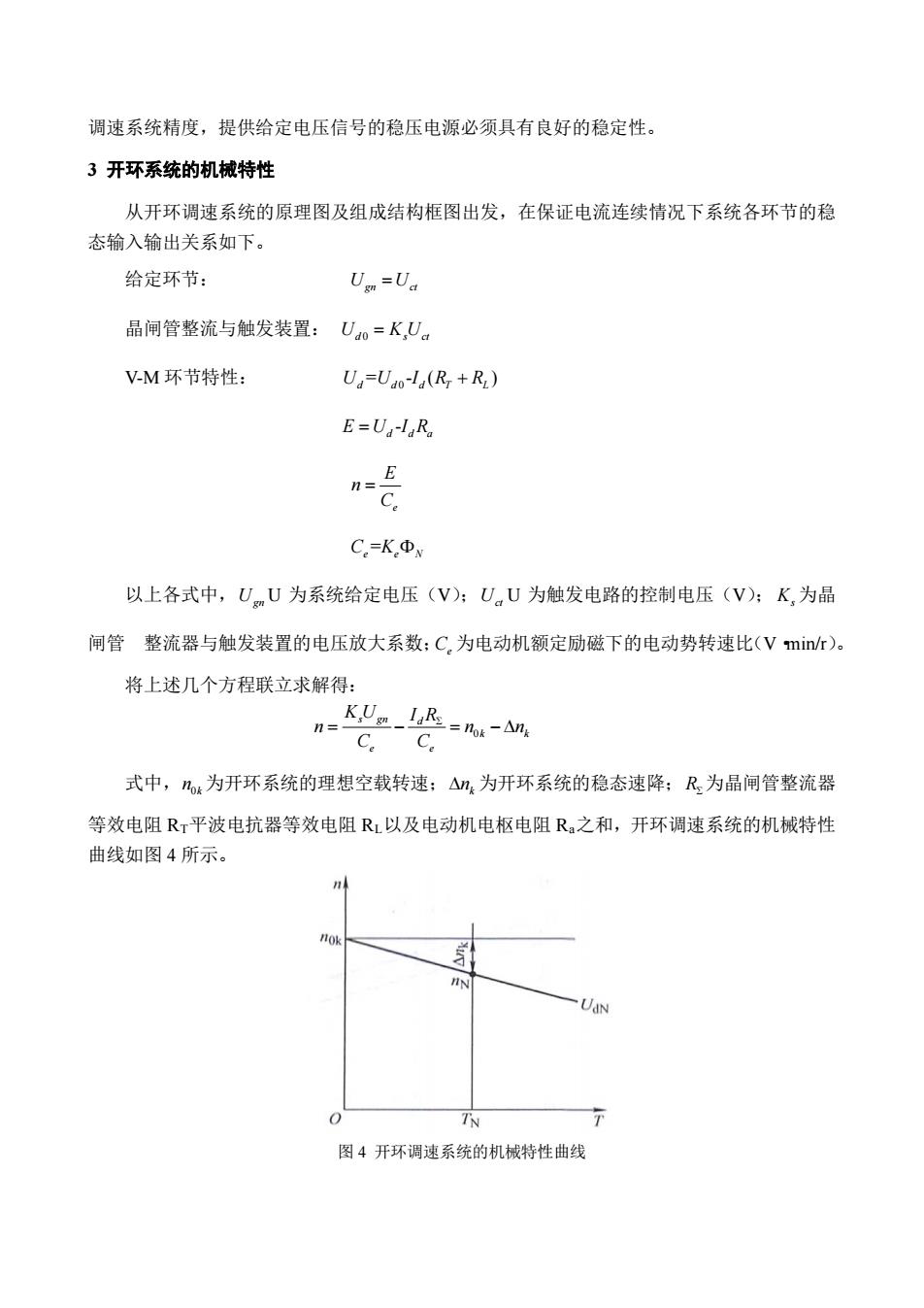
调速系统精度,提供给定电压信号的稳压电源必须具有良好的稳定性。 3 开环系统的机械特性 从开环调速系统的原理图及组成结构框图出发,在保证电流连续情况下系统各环节的稳 态输入输出关系如下。 给定环节: U U gn ct = 晶闸管整流与触发装置: U KU d s ct 0 = V-M 环节特性: U U IR R d d dT L = -( ) 0 + - E U IR = d da e E n C= C K e eN = Φ 以上各式中,Ugn U 为系统给定电压(V);Uct U 为触发电路的控制电压(V); Ks 为晶 闸管 整流器与触发装置的电压放大系数;Ce 为电动机额定励磁下的电动势转速比(V·min/r)。 将上述几个方程联立求解得: 0 s gn d k k e e K U I R n n n C C Σ = − = −∆ 式中, 0k n 为开环系统的理想空载转速; k ∆n 为开环系统的稳态速降;RΣ为晶闸管整流器 等效电阻 RT平波电抗器等效电阻 RL以及电动机电枢电阻 Ra之和,开环调速系统的机械特性 曲线如图 4 所示。 图 4 开环调速系统的机械特性曲线