7.3.1坐标变换的基本思路 山东理子大军 ▣电枢磁动势的作用可以用补偿绕组磁动势抵消, 或者由于其作用方向与轴垂直而对主磁通影响 甚微。 口所以直流电动机的主磁通基本上由励磁绕组的励 磁电流决定,这是直流电动机的数学模型及其控 制系统比较简单的根本原因。 电气与电子工程学院自动化系
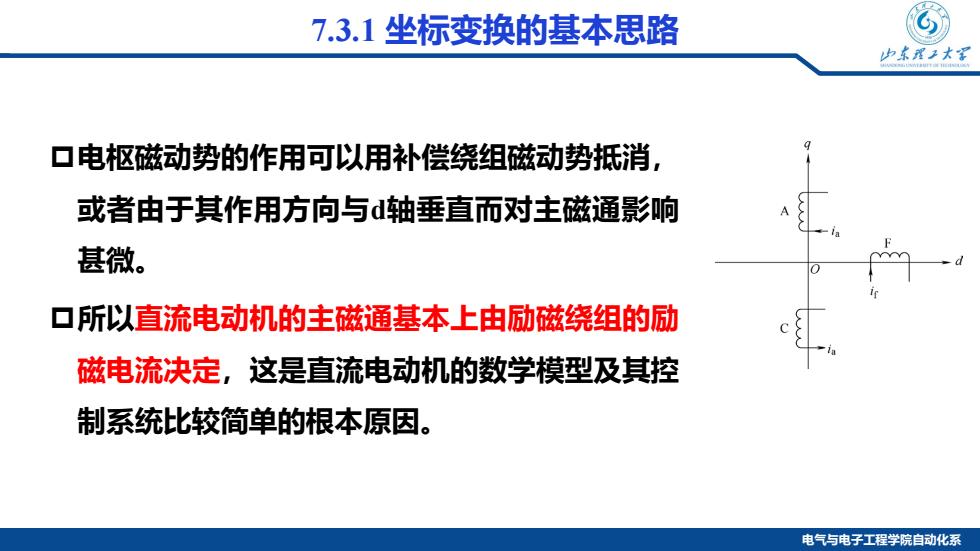
电气与电子工程学院自动化系 电枢磁动势的作用可以用补偿绕组磁动势抵消, 或者由于其作用方向与d轴垂直而对主磁通影响 甚微。 所以直流电动机的主磁通基本上由励磁绕组的励 磁电流决定,这是直流电动机的数学模型及其控 制系统比较简单的根本原因。 7.3.1 坐标变换的基本思路
7.3.1坐标变换的基本思路 山求程子大军 ▣如果能将交流电动机的物理模型等效地变换成 类似直流电动机的模式,分析和控制就可以大 ,定子绕组产 生的磁场 大简化。 ▣不同坐标系中电动机模型等效的原则是:在不 → 转子绕组产 生的磁场 同坐标下绕组所产生的合成磁动势相等变换 前后不改变电机输出电磁转矩! 异步电机物理模型 电气与电子工程学院自动化系
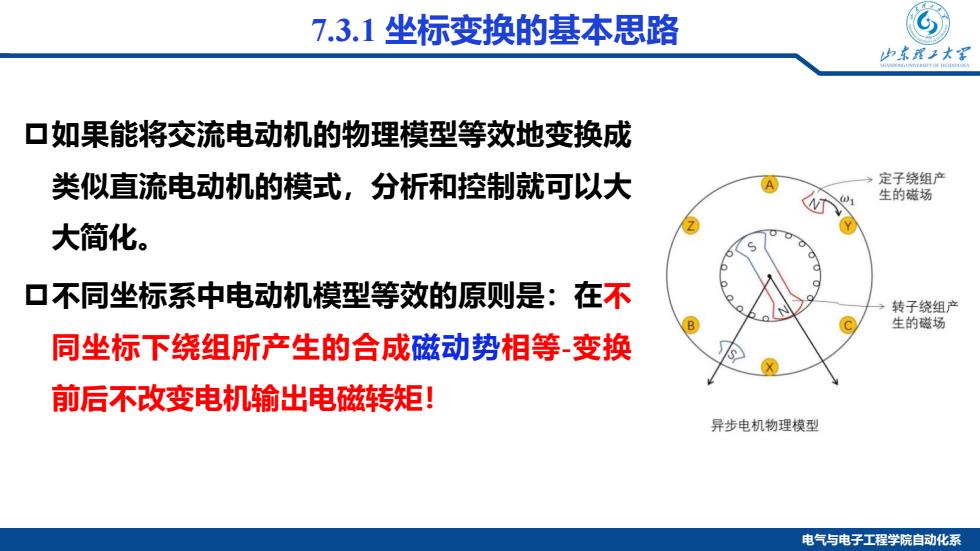
电气与电子工程学院自动化系 如果能将交流电动机的物理模型等效地变换成 类似直流电动机的模式,分析和控制就可以大 大简化。 不同坐标系中电动机模型等效的原则是:在不 同坐标下绕组所产生的合成磁动势相等-变换 前后不改变电机输出电磁转矩! 7.3.1 坐标变换的基本思路
7.3.1坐标变换的基本思路 中东程子大军 ▣在交流电动机三相对称的静止绕组A、B、C中,通以三相平衡的正 弦电流,所产生的合成磁动势是旋转磁动势F,它在空间呈正弦分布, 以同步转速(即电流的角频率)顺着A-B-C的相序旋转。 ▣任意对称的多相绕组,通入平衡的多相电流,都能产生旋转磁动势, 当然以两相最为简单。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 在交流电动机三相对称的静止绕组A、B、C中,通以三相平衡的正 弦电流,所产生的合成磁动势是旋转磁动势F,它在空间呈正弦分布, 以同步转速(即电流的角频率)顺着A-B-C的相序旋转。 任意对称的多相绕组,通入平衡的多相电流,都能产生旋转磁动势, 当然以两相最为简单。 7.3.1 坐标变换的基本思路
7.3.1坐标变换的基本思路 山求理子大军 口三相变量中只有两相为独立变量,完全可以也应该消去一相。 口所以,三相绕组可以用相互独立的两相正交对称绕组等效代替,等 效的原则是产生的磁动势相等。 (常用功率相等约束条件) 口所谓独立是指两相绕组间无约束条件。 口所谓对称是指两相绕组的匝数和阻值相等。 ▣所谓正交是指两相绕组在空间互差90度。 口等效的原则是:1、磁势不变:2、功率不变。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 三相变量中只有两相为独立变量,完全可以也应该消去一相。 所以,三相绕组可以用相互独立的两相正交对称绕组等效代替,等 效的原则是产生的磁动势相等。(常用功率相等约束条件) 所谓独立是指两相绕组间无约束条件。 所谓对称是指两相绕组的匝数和阻值相等 。 所谓正交是指两相绕组在空间互差90度 。 等效的原则是:1、磁势不变;2、功率不变。 7.3.1 坐标变换的基本思路
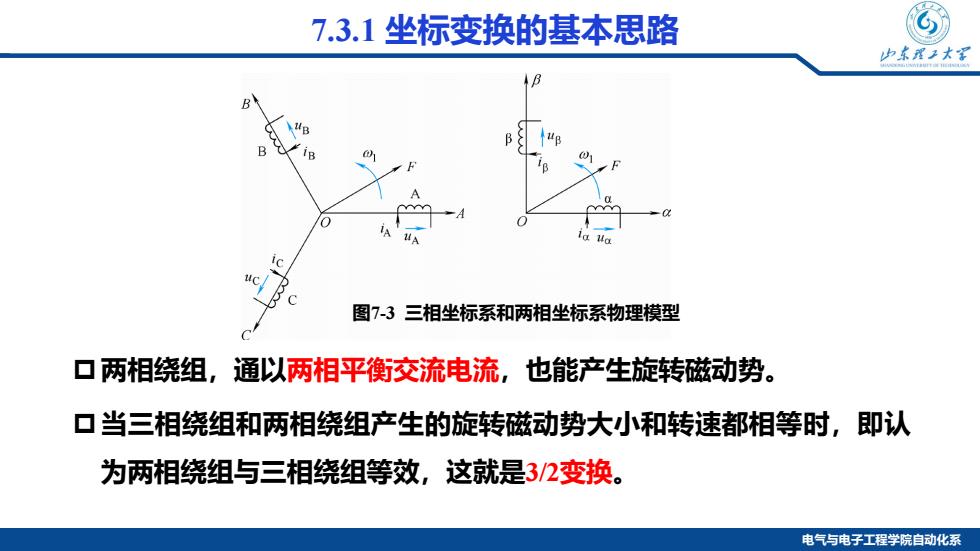
7.3.1坐标变换的基本思路 中东理子大军 B B B iB 740 图7-3三相坐标系和两相坐标系物理模型 口两相绕组,通以两相平衡衡交流电流,也能产生旋转磁动势。 口当三相绕组和两相绕组产生的旋转磁动势大小和转速都相等时,即认 为两相绕组与三相绕组等效,这就是3/2变换。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 7.3.1 坐标变换的基本思路 图7-3 三相坐标系和两相坐标系物理模型 两相绕组,通以两相平衡交流电流,也能产生旋转磁动势。 当三相绕组和两相绕组产生的旋转磁动势大小和转速都相等时,即认 为两相绕组与三相绕组等效,这就是3/2变换