62反馈系统的状态空间描述 6.2.1状态反馈系统的状态空间描述 状态反馈系统的结构图如图6一3所示。 -Kx 图6一3状态反馈系统的结构图
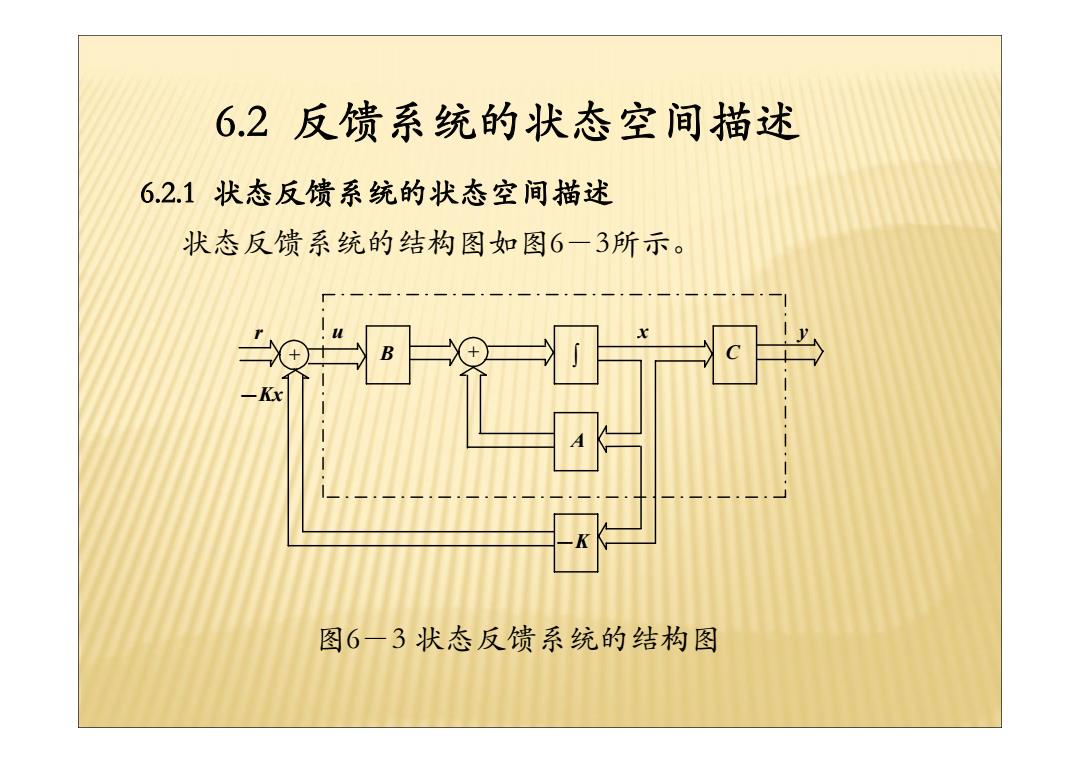
6.2 反馈系统的状态空间描述 A - K B ∫ r u y C x -Kx + + 图6-3 状态反馈系统的结构图 6.2.1 状态反馈系统的状态空间描述 状态反馈系统的结构图如图6-3所示
设原系统的状态空间描述为 ∑: =Ax+Bu (6-1) y=Cx+Du 引入状态反馈,闭环系统的控制规律(输入)为 u=r-Kx (6—2) 式中,r是系统的参考输入,K是p×n状态反馈阵。 闭环系统状态空间描述:将(6一2)代入式(6一1)得 =Ax+B(r-Kx)=(A-BK)x+Br y=Cx+D(r-Kx)=(C-DK)x+Dr 若D=0,则 : 文=(A-BK)x+Br y=Cx
设原系统的状态空间描述为 y Cx Du Σ : x Ax Bu = + & = + 引入状态反馈 ,闭环系统的控制规律(输入)为 Kx u = r -Kx 式中, 是系统的参考输入, 是 状态反馈阵。 r K p × n ( 6-1) ( 6—2) y Cx D r Kx C DK x Dr x Ax B r Kx A BK x Br = + = + = + = + ( ) ( ) ( ) ( ) - - & - - 若 ,则 D = 0 y Cx Σ : x A BK x Br = f & = ( - ) + ( 6—4) ( 6—3) 闭环系统状态空间描述:将( 6-2)代入式( 6-1)得
带状态反馈的闭环系统的传递函数阵为 G(s)=C(sI-(A-BK))-B (6—5) G(s)是q×p阵。 原系统的性能主要由A的特征值(系统的极,点)决定,状态 反馈系统的极,点是A一BK的特征值,有可能通过的选择K来任 意配置系统的极,点
带状态反馈的闭环系统的传递函数阵为 G C I A BK B1 ( ) ( ( )) − f s = s − - ( 6—5) (s) G f 是 阵。 q × p 原系统的性能主要由 的特征值(系统的极点)决定,状态 反馈系统的极点是 的特征值,有可能通过的选择 来任 意配置系统的极点。 A -BK K A

6.2.2 输出反馈系统的状态空间描述 图6一4输出反馈系统的结构图 输出反馈系统的控制规律是 (6-6) 式中,F是pxg输出反馈阵。代入式(6一1)得 =(A-BFC)x+Br y=(C-DFC)x+Dr (6-7)
6.2.2 输出反馈系统的状态空间描述 图6-4输出反馈系统的结构图 输出反馈系统的控制规律是 式中, 是 输出反馈阵。代入式 F p × q ( 6—1) 得 (6-6) + + A B C − F − Fx ∫ r u y x y C DFC x Dr x A BFC x Br = + = + ( ) ( ) - & - (6-7)
若D=0,则有 Ed: =(A-BFC)x+Br (6-8) y=Cx 带输出反馈的闭环系统的传递函数阵为 Gor(s)=C(sI-(A-BFC))-B (6-9) Gg(s)是9×p阵。 原系统的传递函数阵为 G(s)=C(sI-A)B (6-10) 则 G(s)=G(s)(I+FG(s) (6-11) 或 Gr(s)=(I+FG(s))G(s) (6-12) 输出反馈也可以通过F来改变系统的极,点,但它不能像状态 反馈那样任意配置系统的极,点。因为通常方程℉C=K的解不 存在
若 ,则有 D = 0 y Cx Σ : x A BFC x Br = cf & = ( - ) + 带输出反馈的闭环系统的传递函数阵为 G C I A BFC B1 ( ) ( ( ))− cf s = s − - Gcf (s)是 阵。 q× p G C I A B1 ( ) ( ) − s = s − 1 ( ) ( )( ( )) − s = s + s Gcf G I FG 则 ( ) ( ( )) ( ) 1 s s s Gcf I FG G− = + 或 输出反馈也可以通过 来改变系统的极点,但它不能像状态 反馈那样任意配置系统的极点。因为通常方程 的解不 存在。 F FC = K 原系统的传递函数阵为 (6-8) (6-9) (6-10) (6-11) (6-12)