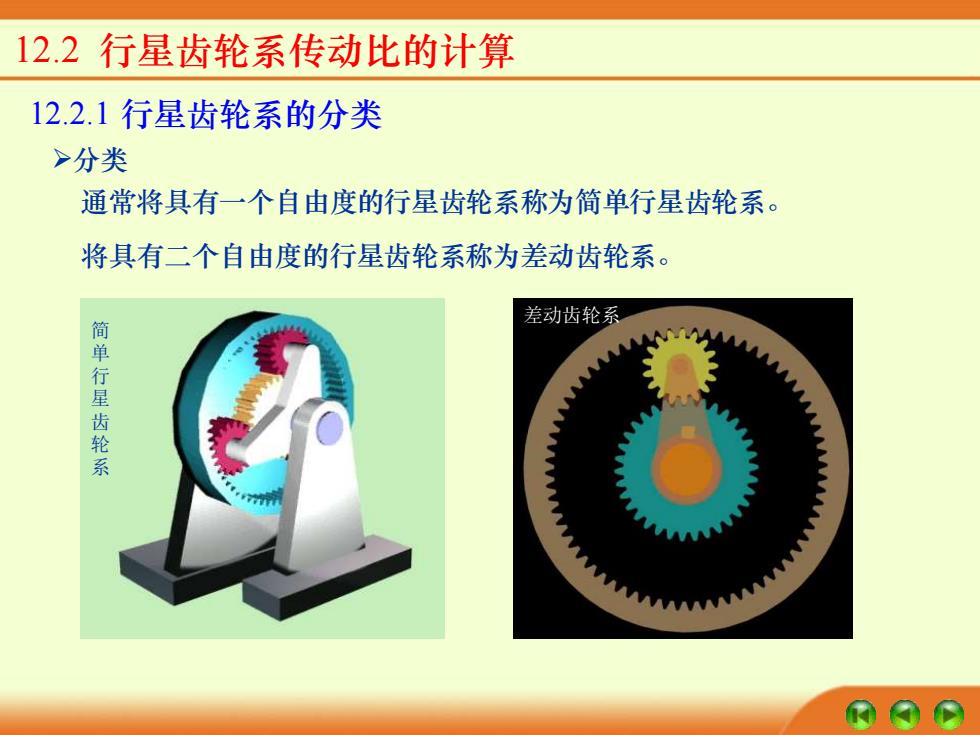
12.2 行星齿轮系传动比的计算 12.2.1行星齿轮系的分类 >分类 通常将具有一个自由度的行星齿轮系称为简单行星齿轮系。 将具有二个自由度的行星齿轮系称为差动齿轮系。 差动齿轮系 简单行星齿轮系
12.2 行星齿轮系传动比的计算 12.2.1 行星齿轮系的分类 ➢分类 通常将具有一个自由度的行星齿轮系称为简单行星齿轮系。 将具有二个自由度的行星齿轮系称为差动齿轮系。 简 单 行 星 齿 轮 系 差动齿轮系
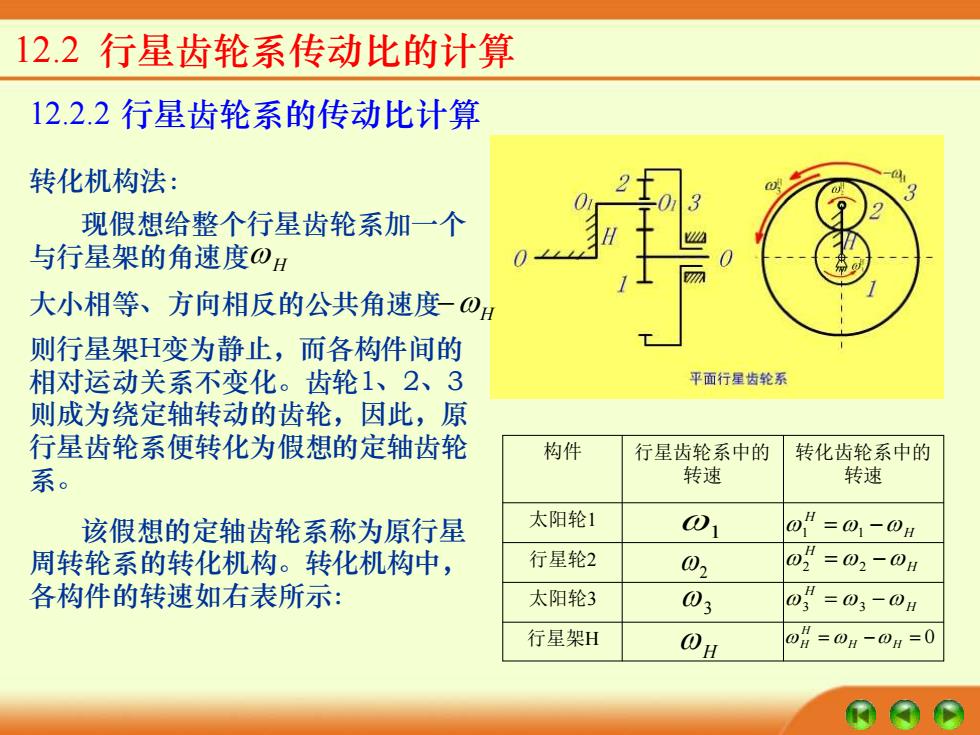
12.2行星齿轮系传动比的计算 12.2.2行星齿轮系的传动比计算 转化机构法: 现假想给整个行星齿轮系加一个 与行星架的角速度0H 大小相等、方向相反的公共角速度-⊙H 则行星架H变为静止,而各构件间的 相对运动关系不变化。齿轮1、2、3 平面行星齿轮系 则成为绕定轴转动的齿轮,因此,原 行星齿轮系便转化为假想的定轴齿轮 构件 行星齿轮系中的 转化齿轮系中的 系。 转速 转速 该假想的定轴齿轮系称为原行星 太阳轮1 01 0H=0,-0H 周转轮系的转化机构。转化机构中, 行星轮2 02 02=02-0H 各构件的转速如右表所示: 太阳轮3 03 of =03-0H 行星架H H 0H=0H-0月=0
12.2 行星齿轮系传动比的计算 12.2.2 行星齿轮系的传动比计算 转化机构法: 现假想给整个行星齿轮系加一个 与行星架的角速度 H 大小相等、方向相反的公共角速度− H 则行星架H变为静止,而各构件间的 相对运动关系不变化。齿轮1、2、3 则成为绕定轴转动的齿轮,因此,原 行星齿轮系便转化为假想的定轴齿轮 系。 该假想的定轴齿轮系称为原行星 周转轮系的转化机构。转化机构中, 各构件的转速如右表所示: 行星架H 太阳轮3 行星轮2 太阳轮1 转化齿轮系中的 转速 行星齿轮系中的 转速 构件 1 H H 1 =1 − 2 H H 2 =2 − 3 H H 3 =3 − H = H − H = 0 H H
12.2行星齿轮系传动比的计算 12.2.2行星齿轮系的传动比计算 转化机构中1、3两轮的传动比可以根据定轴齿轮系传动的计算方法得出 01-0H=- 3 03-0H 21 推广后一般情况,可得: 从=(~)所有从动轮齿数的连乘积 所有主动轮齿数的连乘积
12.2 行星齿轮系传动比的计算 12.2.2 行星齿轮系的传动比计算 转化机构中1、3两轮的传动比可以根据定轴齿轮系传动的计算方法得出 1 3 3 1 3 1 13 z z i H H H H H = − − − = = 推广后一般情况,可得: 所有主动轮齿数的连乘积 H m 所有从动轮齿数的连乘积 AK i = (−1)
12.2行星齿轮系传动比的计算 12.2.2行星齿轮系的传动比计算 注意事项: 1)AKH三个构件的轴线应互相平行,而且04 @K OH n 必须将表示其转向的正负上。首先应假定各轮转动的同一正方 向,则与其同向的取正号带入,与其反向的取负号带入。 2)公式右边的正负号的确定:假想行星架H不转,变成机架。则 整个轮系成为定轴轮系,按定轴轮系的方法确定转向关系。 3)待求构件的实际转向由计算结果的正负号确定
12.2 行星齿轮系传动比的计算 12.2.2 行星齿轮系的传动比计算 注意事项: 1)A、K、H三个构件的轴线应互相平行,而且 必须将表示其转向的正负上。首先应假定各轮转动的同一正方 向,则与其同向的取正号带入,与其反向的取负号带入。 A K H n 2)公式右边的正负号的确定:假想行星架H不转,变成机架。则 整个轮系成为定轴轮系,按定轴轮系的方法确定转向关系。 3)待求构件的实际转向由计算结果的正负号确定
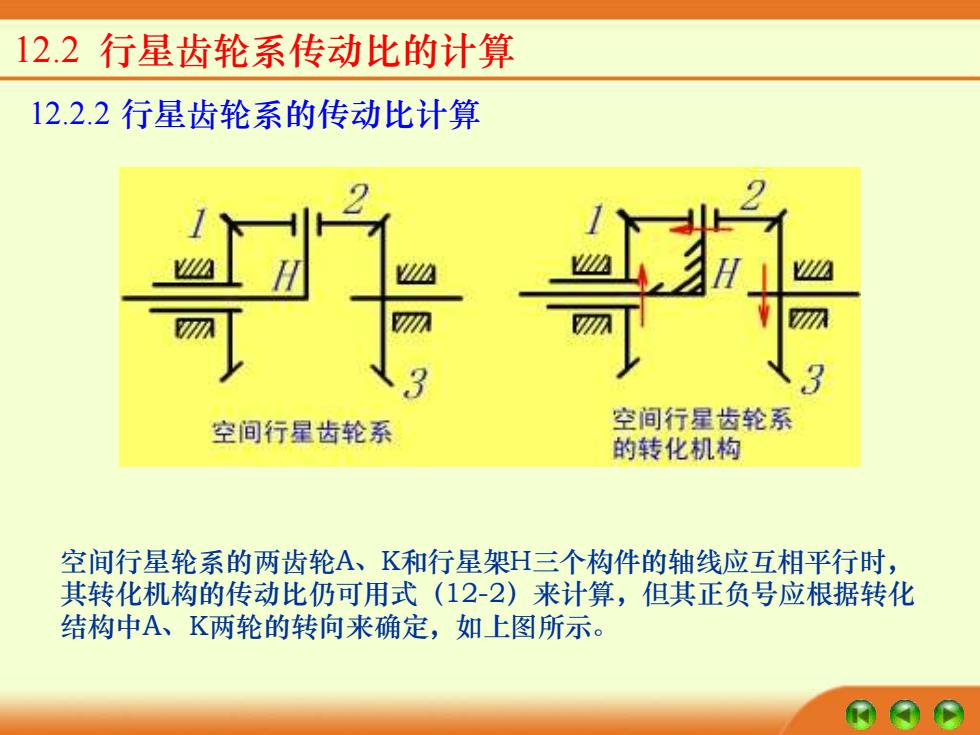
12.2行星齿轮系传动比的计算 12.2.2行星齿轮系的传动比计算 能 空间行星齿轮系 空间行星齿轮系 的转化机构 空间行星轮系的两齿轮A、K和行星架H三个构件的轴线应互相平行时, 其转化机构的传动比仍可用式(12-2)来计算,但其正负号应根据转化 结构中A、K两轮的转向来确定,如上图所示
12.2 行星齿轮系传动比的计算 12.2.2 行星齿轮系的传动比计算 空间行星轮系的两齿轮A、K和行星架H三个构件的轴线应互相平行时, 其转化机构的传动比仍可用式(12-2)来计算,但其正负号应根据转化 结构中A、K两轮的转向来确定,如上图所示