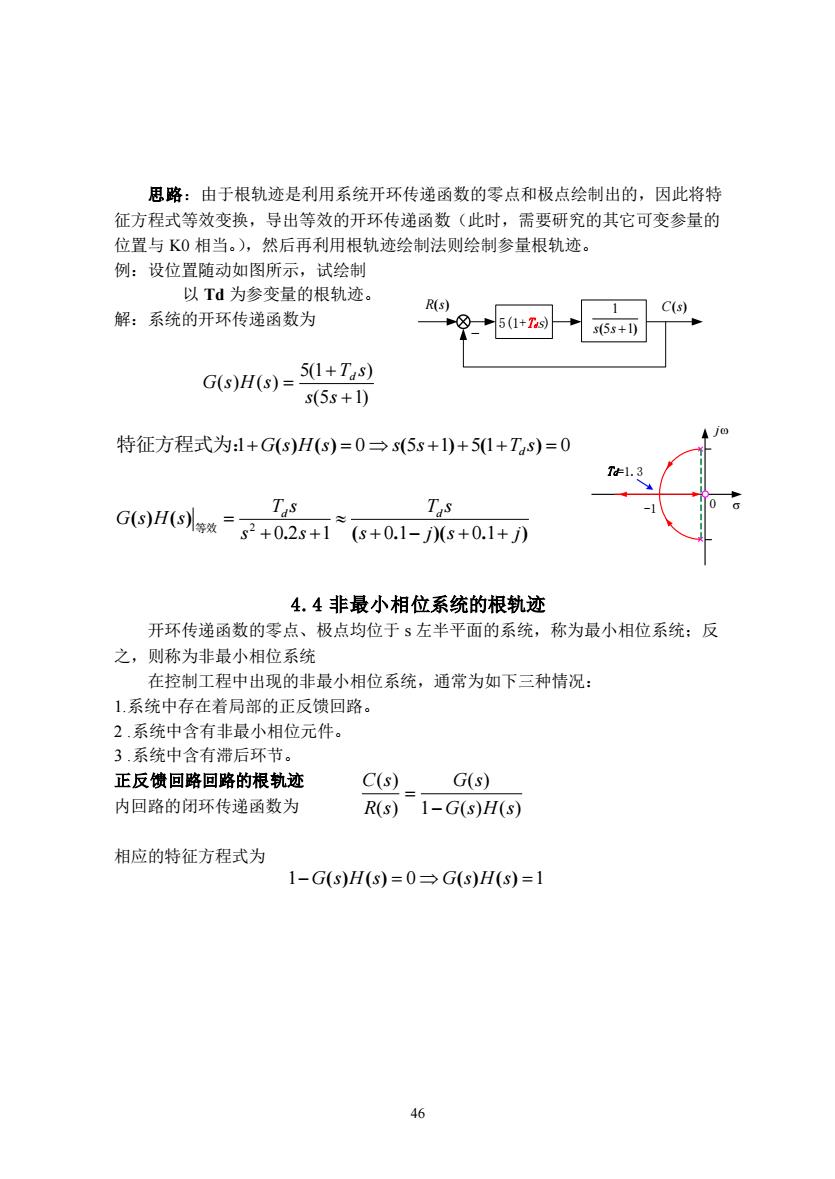
思路:由于根轨迹是利用系统开环传递函数的零点和极点绘制出的,因此将特 征方程式等效变换,导出等效的开环传递函数(此时,需要研究的其它可变参量的 位置与K0相当。),然后再利用根轨迹绘制法则绘制参量根轨迹。 例:设位置随动如图所示,试绘制 以Td为参变量的根轨迹。 R(s) 解:系统的开环传递函数为 +5(1+1s G(s)H(s)=5(L+T,s) s(5s+1) 特征方程式为:l+G(s)H(s)=0→s(5s+)+51+Ts)=0 G(6Hs数=g+02s+1s+0.1-s+0.1+) 4.4非最小相位系统的根轨迹 开环传递函数的零点、极点均位于s左半平面的系统,称为最小相位系统:反 之,则称为非最小相位系统 在控制工程中出现的非最小相位系统,通常为如下三种情况: 1.系统中存在着局部的正反馈回路。 2.系统中含有非最小相位元件。 3系统中含有滞后环节。 正反馈回路回路的根轨迹 C(s) JS)) 内回路的闭环传递函数为 R(s)1-G(s)H(s) 相应的特征方程式为 1-G(s)H(s)=0→G(s)H(s)=1
46 思路:由于根轨迹是利用系统开环传递函数的零点和极点绘制出的,因此将特 征方程式等效变换,导出等效的开环传递函数(此时,需要研究的其它可变参量的 位置与 K0 相当。),然后再利用根轨迹绘制法则绘制参量根轨迹。 例:设位置随动如图所示,试绘制 以 Td 为参变量的根轨迹。 解:系统的开环传递函数为 4.4 非最小相位系统的根轨迹 开环传递函数的零点、极点均位于 s 左半平面的系统,称为最小相位系统;反 之,则称为非最小相位系统 在控制工程中出现的非最小相位系统,通常为如下三种情况: 1.系统中存在着局部的正反馈回路。 2 .系统中含有非最小相位元件。 3 .系统中含有滞后环节。 正反馈回路回路的根轨迹 内回路的闭环传递函数为 相应的特征方程式为 (5 1) 1 s s + 5(1+Tds) R(s) C(s) (5 1) 5(1 ) ( ) ( ) + + = s s T s G s H s d 特征方程式为:1+G(s)H(s) = 0 s(5s +1)+5(1+Td s) = 0 j 0 Td=1.3 -1 1−G(s)H(s) = 0 G(s)H(s) =1 . ( . )( . ) ( ) ( ) s j s j T s s s T s G s H s d d + − + + + + = 0 2 1 0 1 0 1 等效 2 1 ( ) ( ) ( ) ( ) ( ) G s H s G s R s C s − =

KoIIs+ |G(s)H(s)= =1k=0,1,2,. IIs+pl ∠Gs)H6)=∑4s+)-2∠6+p,)=±2kx k=0,1,2,. 幅值条件没有变化,相角条件有变化,因此绘制根轨迹的规则相应变化。 规则3根轨迹在实轴上的分布 实轴上有根轨迹的区段为右侧的开环实极点与开环实零点数目之和为偶数。 规则4根轨迹的渐近线:(当n-m≥2时) 与实轴正方向的夹角 0=F2kn (410) n-m 式中k依次取0,L2一直到获得(n-m)个倾角为止。 规则7根轨迹的出射角和入射角 出射角: 8,=2kr+∑g,-∑0 (411) i=l 入射角: a=2kr+∑0,-2% (4-12) 4.5控制系统根轨迹的性能分析 根轨迹法在系统分析中的应用是多方面的,在参数己知的情况下求系统的特性: 分析参数变化对系统特性的影响(即系统特性对参数变化的敏感度和添加零,极点 对根轨迹的影响):对于高阶系统,运用“主导极点”概念,快速估价系统的基本特 性等 系统的暂态特性取决于闭环零、极点的分布,因而和根轨迹的形状密切相关。 而根轨迹的形状又取决于开环零、极点的分布。那么开环零、极点对根轨迹形状的 影响如何,这是单变量系统根轨迹法的一个基本问题。知道了闭环极点以及闭环零 点(通常闭环零点是容易确定的),就可以对系统的动态性能进行定性分析和定量计 算。 1.加开环极点对控制系统的影响 大量实例表明:增加位于s左半平面的开环极点,将使根轨迹向右半平面移动, 系统的稳定性能降低。例如,设系统的开环传递函数为
47 幅值条件没有变化,相角条件有变化,因此绘制根轨迹的规则相应变化。 规则 3 根轨迹在实轴上的分布 实轴上有根轨迹的区段为右侧的开环实极点与开环实零点数目之和为偶数。 规则 4 根轨迹的渐近线:(当 n − m 2 时) 与实轴正方向的夹角 n m k − = 2 (4-10) 式中 k 依次取 0,1,2 一直到获得( n − m )个倾角为止。 规则 7 根轨迹的出射角和入射角 出射角: = = = + − m i n j l j l i j k 1 1 2 (4-11) 入射角: = = = + − n j m i l i k j i k 1 1 2 (4-12) 4.5 控制系统根轨迹的性能分析 根轨迹法在系统分析中的应用是多方面的,在参数已知的情况下求系统的特性; 分析参数变化对系统特性的影响(即系统特性对参数变化的敏感度和添加零,极点 对根轨迹的影响);对于高阶系统,运用“主导极点”概念,快速估价系统的基本特 性等。 系统的暂态特性取决于闭环零、极点的分布,因而和根轨迹的形状密切相关。 而根轨迹的形状又取决于开环零、极点的分布。那么开环零、极点对根轨迹形状的 影响如何,这是单变量系统根轨迹法的一个基本问题。知道了闭环极点以及闭环零 点(通常闭环零点是容易确定的),就可以对系统的动态性能进行定性分析和定量计 算。 1. 加开环极点对控制系统的影响 大量实例表明:增加位于 s 左半平面的开环极点,将使根轨迹向右半平面移动, 系统的稳定性能降低。例如,设系统的开环传递函数为 ( ) ( ) 1 0,1,2, 1 1 0 = = + + = = = k s p K s z G s H s n j j m i i ( ) ( ) ( ) ( ) 2 0,1,2, 1 1 = + − + = = = = G s H s s z s p k k j n j i m i