自动控制理论实验 实验四三阶系统的稳定性分析(1) 一、实验目的 1.熟悉三阶模拟系统的组成。 2.研究增益K对三阶系统稳定性的影响。 3.研究时间常数T对三阶系统稳定性的影响。 二、主要实验设备及仪器 1.TKKL2型控制理论实验箱一台 2.DF4313D型10MHz慢扫描双踪示波器一台。 3.万用表一只。 三、实验线路 1.某恒值调节系统 00 300A 接示波器 图41恒值调节系统 如图4-1所示,该系统的特征方程为 T1T2T3S3+(T1T2+T1T3+T2T3)S24(T+T2+T3)S+1+KKK30=0 按参数可改写为0.03S3+0.43S2+1.4S+1+30a=0(a为电位器Rw的分 压系数) 由劳斯稳定判据可知,该系统稳定的条件是0<a<0.635。这意味着a>0.635 时系统为不稳定,而a=0.635时系统临界稳定作等幅震荡,0.635是该系统稳定的 临界值。 2.某随动控制系统 如图42所示,该系统的特征方程为 TiT2T3S3+(TiT2+TiT3)S2+TiS+KiK2a=0 按参数可改写为0.002S3+0.03S2+0.1S+2a=0(a为电位器RW的分压 11
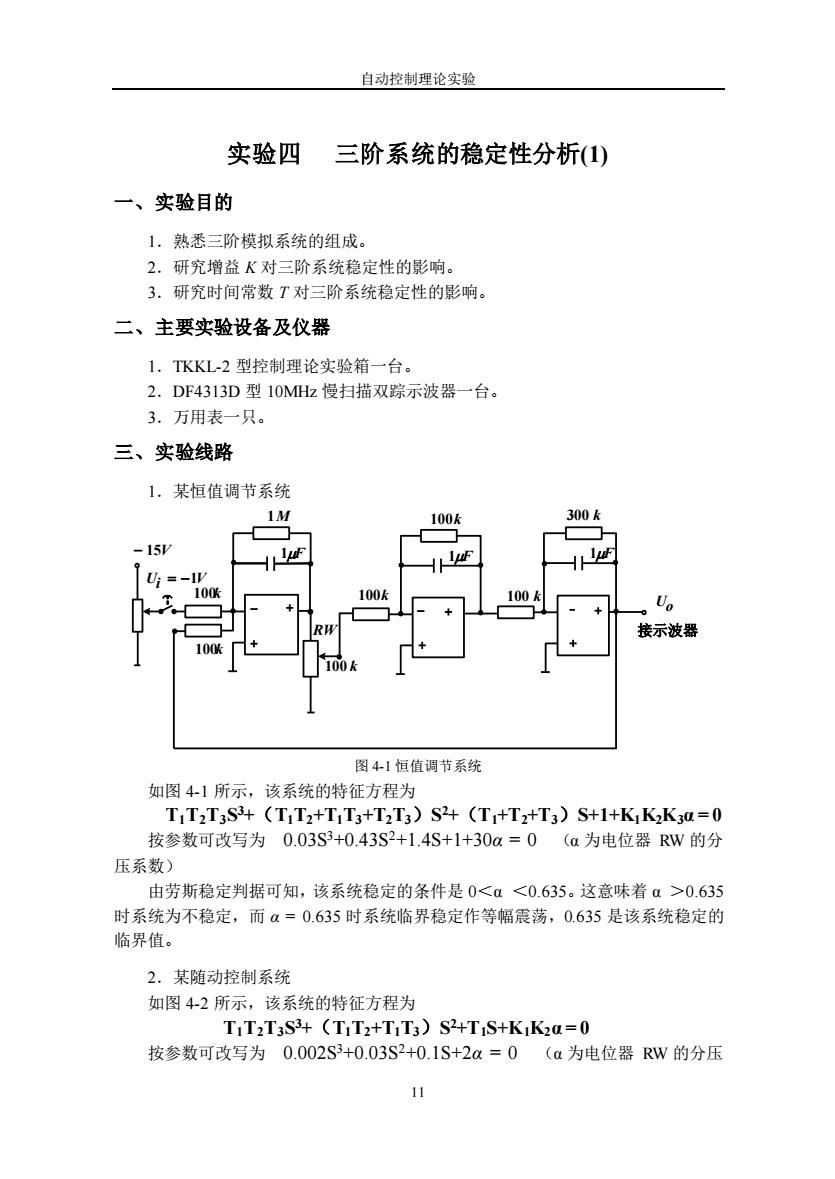
自动控制理论实验 11 实验四 三阶系统的稳定性分析(1) 一、实验目的 1.熟悉三阶模拟系统的组成。 2.研究增益 K 对三阶系统稳定性的影响。 3.研究时间常数 T 对三阶系统稳定性的影响。 二、主要实验设备及仪器 1.TKKL-2 型控制理论实验箱一台。 2.DF4313D 型 10MHz 慢扫描双踪示波器一台。 3.万用表一只。 三、实验线路 1.某恒值调节系统 − 15V Ui = −1V 100k 接示波器 100k 100 k 100k 1F 100k 300 k RW Uo 1F 1F 1M 100 k 图 4-1 恒值调节系统 如图 4-1 所示,该系统的特征方程为 T1T2T3S 3+(T1T2+T1T3+T2T3)S 2+(T1+T2+T3)S+1+K1K2K3α = 0 按参数可改写为 0.03S3+0.43S2+1.4S+1+30α = 0 (α 为电位器 RW 的分 压系数) 由劳斯稳定判据可知,该系统稳定的条件是 0<α <0.635。这意味着 α >0.635 时系统为不稳定,而 α = 0.635 时系统临界稳定作等幅震荡,0.635 是该系统稳定的 临界值。 2.某随动控制系统 如图 4-2 所示,该系统的特征方程为 T1T2T3S 3+(T1T2+T1T3)S 2+T1S+K1K2α = 0 按参数可改写为 0.002S3+0.03S2+0.1S+2α = 0 (α 为电位器 RW 的分压
自动控制理论实验 系数) 由劳斯稳定判据可知,该系统稳定的条件是a<0.75。这意味着α>0.75时系 统为不稳定,而a=075时系统临界稳定作等幅震荡,0.75是该系统稳定的临界值。 00 图4-2随动控制系统 四、实验内容 1.分别按图4-1和图4-2所示的参数接线,每次经检查无误后方可通电进行实 验。 .调节RW改变电位器RW的分压系数a时,通过示波器来观察输出,先调 等幅震荡曲线再用万用表测α的临界值,然后确定系统的稳定性状态。并填写表4-1 的内容。 子,将图41中的1M电阻接成可调形式,如图43所示。调节与 该电阻,观察实验过程,并记录和分析实验现象。 图4-3 4.将图41中第一级运算放大器的反馈电容换为0.1F,观察实验过程,并记 录和分析实验现象。 五、实验报告 1.定性地分析系统的开环增益K和时间常数T对三阶系统稳定性的影响。 2,将代数稳定判据的结果与实验所得出的结果作一比较。 3.总结和分析实验结果并写出实验报告。 六、实验思考题 1.为什么闭环控制系统会产生不稳定现象? 2.为使系统能稳定工作,开环增益K应适当取小还是取大? 3.系统的稳定性与系统特征方程的根有怎样的关系?为什么?
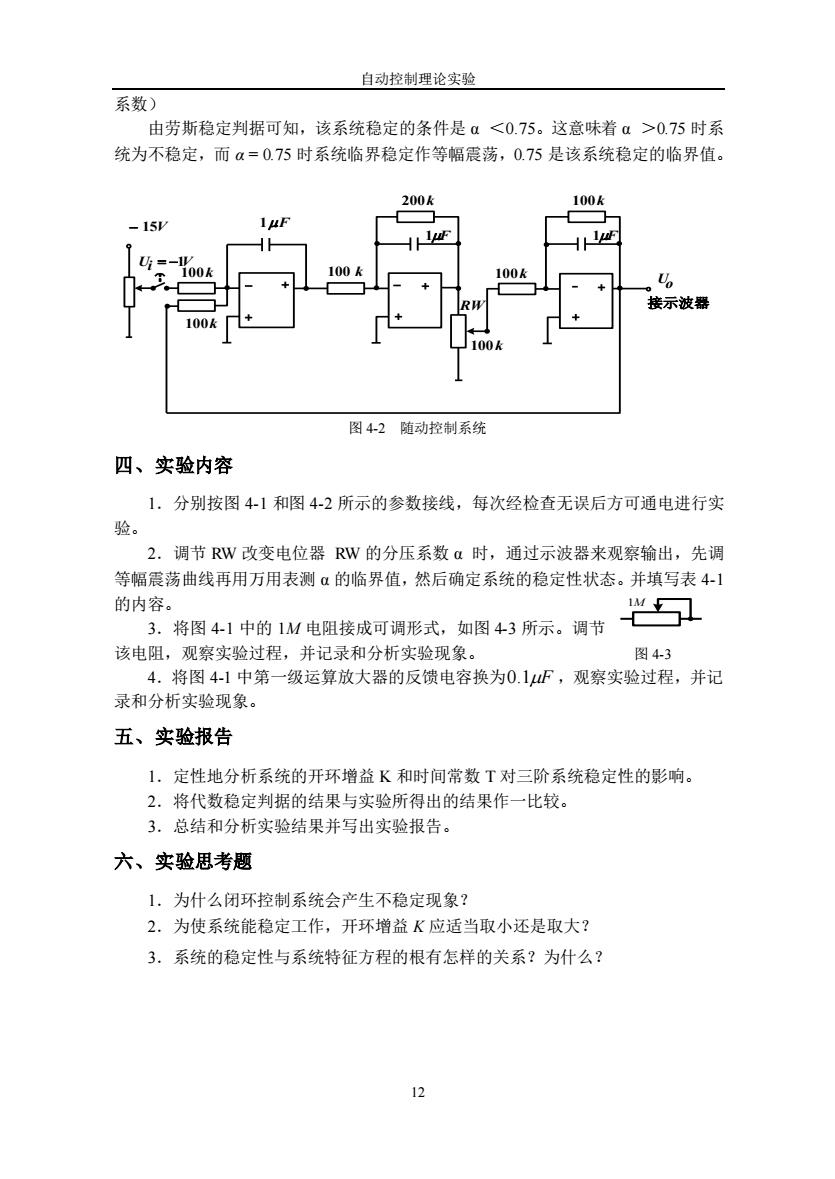
自动控制理论实验 12 系数) 由劳斯稳定判据可知,该系统稳定的条件是 α <0.75。这意味着 α >0.75 时系 统为不稳定,而 α = 0.75 时系统临界稳定作等幅震荡,0.75 是该系统稳定的临界值。 − 15V Ui = −1V 100k 1F 接示波器 100 k 100k 100k 1F 200k 100k RW Uo 1F 100k 图 4-2 随动控制系统 四、实验内容 1.分别按图 4-1 和图 4-2 所示的参数接线,每次经检查无误后方可通电进行实 验。 2.调节 RW 改变电位器 RW 的分压系数 α 时,通过示波器来观察输出,先调 等幅震荡曲线再用万用表测 α 的临界值,然后确定系统的稳定性状态。并填写表 4-1 的内容。 3.将图 4-1 中的 1M 电阻接成可调形式,如图 4-3 所示。调节 该电阻,观察实验过程,并记录和分析实验现象。 图 4-3 4.将图 4-1 中第一级运算放大器的反馈电容换为 0.1F ,观察实验过程,并记 录和分析实验现象。 五、实验报告 1.定性地分析系统的开环增益 K 和时间常数 T 对三阶系统稳定性的影响。 2.将代数稳定判据的结果与实验所得出的结果作一比较。 3.总结和分析实验结果并写出实验报告。 六、实验思考题 1.为什么闭环控制系统会产生不稳定现象? 2.为使系统能稳定工作,开环增益 K 应适当取小还是取大? 3.系统的稳定性与系统特征方程的根有怎样的关系?为什么? 1M

自动控制理论实验 表41: a的理论计算范围 a<0.635 a=0.635 a>0.635 a的实测范围 值 系统的稳定性分析 统 单位阶跃响应曲线 a的理论计算范用 a<0.75 a=0.75 a>0.75 a的实测范围 动 系统的稳定性分析 制 系 统 单位阶跃响应曲线
自动控制理论实验 13 表 4-1: 恒 值 调 节 系 统 α 的理论计算范围 α <0.635 α =0.635 α >0.635 α 的实测范围 系统的稳定性分析 单位阶跃响应曲线 随 动 控 制 系 统 α 的理论计算范围 α <0.75 α =0.75 α >0.75 α 的实测范围 系统的稳定性分析 单位阶跃响应曲线