§5.2虚功原理 导读 ·实位移虚位移 。实功虚功 ·虚功(虚位移)原理 ·拉格朗日乘子与约束力
§5.2 虚功原理 导读 • 实位移 虚位移 • 实功 虚功 • 虚功(虚位移)原理 • 拉格朗日乘子与约束力

1实位移和虚位移 质点由于运动实际发生的位移,叫做实位移.用d表示 想象的质点在约束许可情况下发生的位移,叫做虚位 移.用δ表示.虚位移只决定于质点在此时的位置和加 在它上面的约束,而不是由于时间变化所引起的. 虚位移和实位移的区别是实位移要满足运动方程,而 虚位移只需要满足约束.在稳定约束下,实位移是无限多 虚位移中的一个.而在不稳定约束时,可能二者不一致
1 实位移和虚位移 质点由于运动实际发生的位移, 叫做实位移. 用dr表示. 想象的质点在约束许可情况下发生的位移, 叫做虚位 移. 用 r表示. 虚位移只决定于质点在此时的位置和加 在它上面的约束, 而不是由于时间变化所引起的. 虚位移和实位移的区别是实位移要满足运动方程,而 虚位移只需要满足约束. 在稳定约束下,实位移是无限多 虚位移中的一个. 而在不稳定约束时, 可能二者不一致
设有n个质点的系统,存在m个完整约束,其约束方程 f(G,.,万n,t)=0 (i=1,2,.,m) 设,.,n是满足约束条件的虚位移,则 f(G+,万+2,.,+n,)=0 (i=1,2,.,m) 对6r作多元函数的泰勒展开(t被“冻结”),略去二 次以上的项, ∑7/(G,五,.,i)=0 (j=1,2,.,m) 满足上式的一组r,就是虚位移
设有n个质点的系统, 存在m个完整约束, 其约束方程 ( , , , , ) 0 ( 1,2, , ) f i r1 r2 rn t i m = = 设 r r rn 是满足约束条件的虚位移, 则 1 , 2 , , ( , , , , ) 0 ( 1,2, , ) f i r1 r1 r2 r2 rn rn t i m + + + = = 对 ri 作多元函数的泰勒展开(t 被“冻结”), 略去二 次以上的项, ( , , , , ) 0 ( 1,2, , ) 1 f r1 r2 r t ri j m n i i j n = = = 满足上式的一组ri 就是虚位移
而真实位移dr是一个在时间d间隔中完成的位移, 为使其满足约束条件,必须 f(G+d,+d,.,fn+dn,t+d)=0(i=1,2,.,m 于是得 d+/d=0 (=1,2,.,m) 是约束对真实位移的限制条件,即时间不被“冻结” 的可能位移应满足的条件如约束是稳定的,虚、实位 移相同
而真实位移dri是一个在时间dt间隔中完成的位移, 为使其满足约束条件, 必须 ( d , d , , d , d ) 0 ( 1,2, , ) f i r1 r1 r2 r2 rn rn t t i m + + + + = = 于是得 d / d 0 ( 1,2, , ) 1 f ri f j t t j m n i i j + = = = 是约束对真实位移的限制条件, 即时间不被“冻结” 的可能位移应满足的条件. 如约束是稳定的,虚、实位 移相同
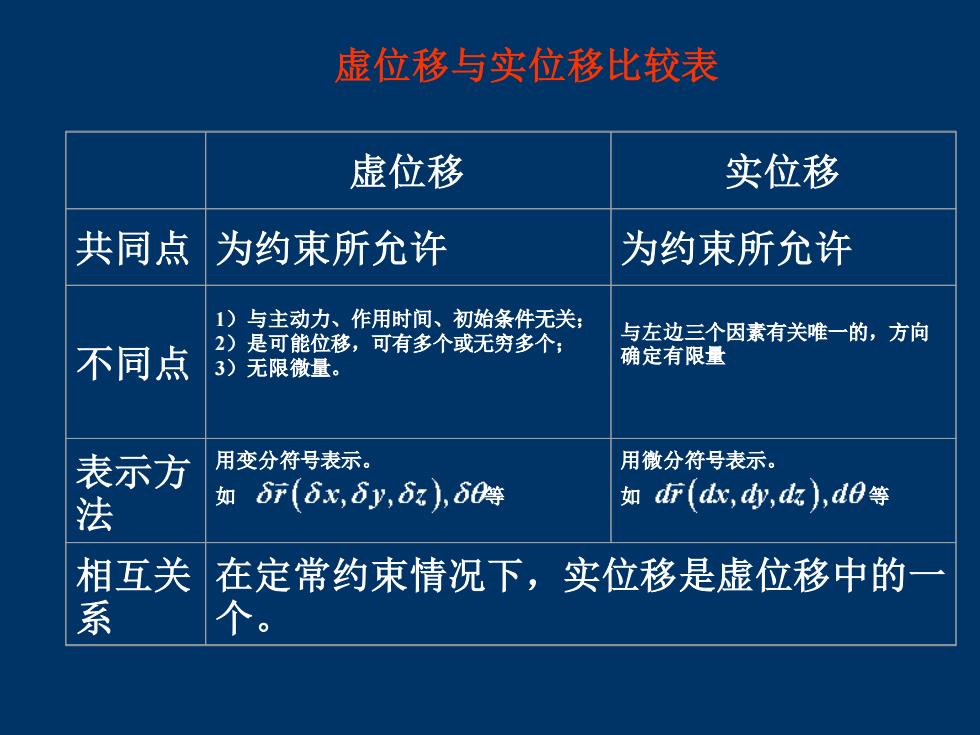
虚位移与实位移比较表 虚位移 实位移 共同点 为约束所允许 为约束所允许 1)与主动力、作用时间、初始条件无关: 不同点 2)是可能位移,可有多个或无穷多个: 与左边三个因素有关唯一的,方向 3)无限微量。 确定有限量 示方 用变分符号表示。 用微分符号表示。 法 如6(6x,6y,6z),60 如标(d,dk),d0等 相互关 在定常约束情况下,实位移是虚位移中的 系 个
虚位移与实位移比较表 虚位移 实位移 共同点 为约束所允许 为约束所允许 不同点 1)与主动力、作用时间、初始条件无关; 2)是可能位移,可有多个或无穷多个; 3)无限微量。 与左边三个因素有关唯一的,方向 确定有限量 表示方 法 用变分符号表示。 如 等 用微分符号表示。 如 等 相互关 系 在定常约束情况下,实位移是虚位移中的一 个